

2.4. Метод преобразования координат
Во
всех рассмотренных выше задачах
выбиралась такая система координат
OXY, в которой уравнения кинематики имеют
наиболее простой и удобный для решения
вид. Однако конечный результат часто
бывает необходимо получить в некоторой
неподвижной системе координат, в которой
рассматривается весь механизм в целом.
Кроме того, полученные в подразделе 2.3
выражения не позволяют определять
кинематические параметры движения
произвольных точек на звеньях механизмов,
например, центров масс, рабочих органов
и т.п. Все эти проблемы удобно решать
методом преобразования координат.
Рассмотрим конкретный пример. Пусть требуется определить кинематическое параметры движения некоторой точки S на шатуне AB (рис. 2.15).
Суть метода. С каждым звеном механизма связывают свою систему координат. На рис. 2.15 OXY – неподвижная система координат (НСК), связанная со стойкой, AX2Y2 – подвижная локальная система координат (ЛСК), связанная с шатуном 2 и движущаяся вместе с ним. Координаты (.)S в ЛСК нам известны и в процессе движения они не меняются. Связь между координатами точки, измеренными в разных системах известна из аналитической геометрии, на этом и строится данный метод.
Положение начала ЛСК надо выбирать так, чтобы можно было заранее определить его кинематические параметры движения. Для рассматриваемых примеров координаты (xA, yA), проекции скорости (vAx, vAy) и ускорения (aAx, aAy) точки A найдём как параметры движения конца кривошипа 1 (см. п. 2.2.1).
xA = lОА cos 1,
yA = lОА sin 1,
где lОА – длина кривошипа.
vAx = – 1 lОА sin 1,
vAy
= 1
lОА
cos
1,
где 1 – угловая скорость кривошипа.
где 1 – угловое ускорение кривошипа.
Величины 1, 1, 1 должны быть заданы по постановке задачи кинематического анализа.
Ось X2 ЛСК следует направлять вдоль соответствующего вектора l2 (см. векторные контуры в п. 2.3) или параллельно ему, ось Y2 – так, чтобы образовывалась правая система координат.
Кроме того, будем полагать, что предварительно выполнен расчёт методом векторных контуров (см. п. 2.3.1, 2.3.2), и нам известны параметры вращательного движения шатуна 2 2, 2, 2.
Координаты (.)S в НСК найдём, просто записав связь между координатами точки, измеренными в разных системах координат. В матричной форме она имеет вид:

(2.36)
Последовательно дифференцируя выражение (2.36) по времени, получим зависимости для определения проекций скорости и ускорения (.)S в НСК:

(2.37)

2.5. Общая последовательность кинематического анализа
Рассмотренные выше метод векторных контуров и метод преобразования координат позволяют произвести полный кинематический анализ механизма. Рассмотрим, как эти два метода взаимодействуют на примере 6-звенного механизма, представленного на рис. 2.16.
Общую последовательность кинематического расчета можно представить следующим образом.
1. По исходно заданным кинематическим параметрам движения входного звена определяются параметры движения той его точки, в которой присоединяется 1-я структурная группа.
2. Производятся расчеты для неё и вычисляются параметры движения той точки звена структурной группы, в которой присоединяется следующая.
3. Эти значения преобразуются в систему координат следующей структурной группы, производится её расчет и т.д.
Рассмотрим
эту последовательность подробно. Пусть
изначально задан угол поворота кривошипа
ОА 01
от оси X0,
значение его угловой скорости 1,
и ускорения 1
в данном положении.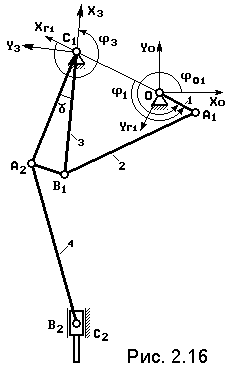
Сначала решаем задачу для контура OA1B1C1, состоящего из входного кривошипа и 3-х шарнирной структурной группы. Решение производим в НСК OXГ1YГ1, естественной для данной группы (см. рис. 2.16). Угол поворота кривошипа в этой системе: 1 = 01 – 01,
где: 01 – угол поворота системы OXГ1YГ1 от OX0Y0
Координаты
опоры С1(xC1,
yC1)
должны быть заданы как конструктивные
параметры.
Параметры движения шарнира А1 определяем так, как это описано в подразделе 2.2. Далее, производим анализ методом векторных контуров, как это описано в п. 2.3.1. В результате находим 2, 2, 2, 3, 3, 3 – параметры вращательного движения шатуна А1В1 и коромысла В1С1.
Методом преобразования координат (см. подраздел 2.4) находим параметры движения центров масс этих звеньев и точки А2, в которой присоединяется следующая структурная группа.
Переходим к следующему контуру C1A2B2, рассмотрим его отдельно (рис. 2.17). Он представляет собой 4-х звенный механизм со структурной группой типа “шатун-ползун”. Как показано в п. 2.3.2 решение удобно искать в НСК OXГ2YГ2, поэтому координаты шарнира А2, проекции его скорости и ускорения, найденные ранее в НСК OXГ1YГ1 следует преобразовать в НСК OXГ2YГ2, тогда контур C1A2B2 решается так, как это описано в п. 2.3.2. В результате находим 4, 4, 4 – параметры вращательного движения шатуна, A2C2 и xC2, vC2, aC2 – положение, скорость и ускорение ползуна.
Методом преобразования координат находим параметры движения центров масс шатуна и при необходимости преобразовываем их в НСК X0Y0.