

4.8.4. Волновые зубчатые механизмы
Волновыми называются механизмы, в составе есть которых упруго деформируемые колеса. По структуре эти механизмы можно отнести к планетарным. Приведем основные термины.
Колесо, которое в процессе работы упруго деформируется – называется гибким колесом.
Колесо, которое в процессе работы не деформируется – называется жестким.
Звено, деформирующее гибкое колесо и с точки зрения структуры являющееся водилом здесь называется генератором волн деформации или просто генератором.
Существует две схемы волновых механизмов:
а) С неподвижным гибким колесом.
б) С неподвижным жестким колесом.
Рассмотрим схему с неподвижным гибким колесом, как более распространенную. Структурная схема такого механизма представлена на рис. 4.19, где а – жесткое колесо, b – гибкое колесо, h – генератор волн, р – ролики.
Входным
звеном в этих механизмах является
генератор волн (h).
Так как внешний диаметр генератора
делается несколько большим, чем внутренний
диаметр гибкого колеса, то генератор,
с усилием вставленный внутрь колеса b,
деформирует его. При его вращении
генератора – вращается деформация
гибкого колеса, а т.к. число зубьев колеса
b
(Zb)
делается на 1 … 3 зуба меньше, чем Za,
то за каждый оборот генератора происходит
разворот колеса а
относительно колеса b.
Например, если Za
– Zb
= 1, то за полный оборот генератора h
колесо а
разворачивается относительно колеса
b
на угол, соответствующий шагу зацепления.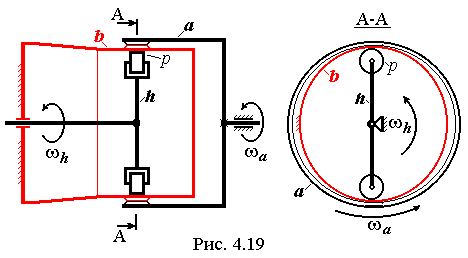
Найдем
передаточное отношение механизма. После
остановки водила в данном случае получаем
зубчатую пару внутреннего зацепления.
Поскольку по структуре это планетарные механизмы, то можно воспользоваться формулой (4.22), тогда

( 4.31 )
Диапазон передаточных отношений. Из формулы (4.31) имеем:

( 4.32 )
где B – деформация гибкого колеса.
Таким образом, деформация гибкого колеса обратно пропорциональна величине передаточного отношения. Следовательно, с ростом передаточного отношения уменьшается деформация гибкого колеса. Но как видно из рис. 4.19 (сечение A-A) его деформация должна быть достаточной, чтобы колеса a и b выходили из зацепления там, где генератор не воздействует на колесо b. Для того, чтобы это обеспечить при больших передаточных отношениях – колесо b надо изготавливать очень тонким. По этой причине передаточное отношение волновых механизмов обычно не превышает iha(b) < 300.
С уменьшением передаточного отношения увеличивается деформация гибкого колеса. Но т.к. она должна оставаться в пределах упругих деформаций материала, то обычно удается создавать механизмы только с iha(b) > 70.
Преимущества волновых механизмов.
1. Возможность создания механизмов с очень большим передаточным отношением в очень малых габаритах.
2. Возможность создания герметичных передач без уплотнения подвижных элементов.
Эти свойства предопределили применение этих механизмов, например, для привода вращения антенн космических аппаратов.
Недостатки волновых механизмов.
1. Невозможность создания механизмов с малым передаточным отношением.
2. При малых габаритах передачи получаются мелкомодульными, с ограниченными возможностями по передаче крутящих моментов.