

9
.pdfпар полюсов каждой из таких машин равно основному числу пар полюсов, умноженному на порядковый номер гармоники (рис. 12, а), а соответствующие им синхронные частоты вращения составляют: ± ω1/νi. Наибольшие значения имеют 5-я и 7-я гармоники поля. Поле от 7-й гармоники вращается в том же направлении, что и основное, а поле 5-й гармоники – в противоположном.
Электромагнитные моменты, создаваемые основной (М1), и высшими (М5 и М7) гармониками показаны на рис. 12, б. Характеристики строятся в координатах M = f(ω), поскольку скольжения, равные нулю, соответствуют различным частотам вращения: s1 = 0 при ω = ω1; s5 = 0 при ω = -ω1/5; s7 = 0 при ω = ω1/7. В итоге в кривой результирующего момента появляется провал, который обусловлен в первую очередь тем, что на частоте вращения, близкой к 0,2ω1 момент М7, противоположно направленный по отношению к основному моменту, достигает максимального значения генераторного режима.
Синхронные моменты возникают в результате взаимодействия пространственных гармоник статора и ротора, вращающихся в противоположных направлениях, при частоте вращения ротора, определяемой равенством:
|
|
|
|
1 2 |
|
. |
(34) |
|||
2 |
1 |
1 |
|
2 |
||||||
|
|
|
|
|||||||
|
|
|
|
|
1 |
|
|
|||
В этот момент времени полюсная система статора оказывается неподвижной по отношению к полюсной системе ротора, и возникает синхронный момент. Взаимное положение полюсов периодически меняется на противоположное, поэтому синхронные моменты имеют знакопеременный характер, и среднее их значение равно нулю. При вращении ротора они преодолеваются за счет инерции, но могут затруднить сдвиг ротора из неподвижного состояния. Наиболее значительные синхронные моменты могут возникать от зубцовых гармоник первого порядка. Во избежание этого число пазов статора и ротора необходимо выбирать таким образом, чтобы выполнялись неравенства:
Z1 Z2 ; Z2 Z1 2p |
(35) |
Дополнительные синхронные и асинхронные моменты уменьшаются при увеличении воздушного зазора машины.
9 Построение механических характеристик асинхронных двигателей по каталожным данным
Уравнение электромагнитного момента в параметрической форме записи неудобно для использования на практике. Кроме того, оно дает достаточно точные результаты только в рабочей области. При s > sкр действительные значения моментов могут существенно отличаться от тех, которые вычислены при тех же скольжениях по уравнениям (29…32). Это объясняется изменением параметров двигателя в процессе пуска за счет эффекта вытеснения тока, и действием высших гармонических составляющих магнитных потоков в воздушном зазоре. Реальный пусковой момент обычно оказывается больше расчетного, а в зоне больших (примерно 0,7…0,9) скольжений в механических характеристиках появляется провал. Провал в механической характеристике ухудшает условия пуска двигателей под нагрузкой и может стать причиной нарушения устойчивости их работы. Момент, соответствующий этому провалу, называется минимальным и нормируется. Его относительное значение должно быть не менее 0,8. Для современных трехфазных асинхронных электродвигателей кратность минимального момента обычно находится в пределах: 1,1 ≤ µmin ≤ 1,6. Механические характеристики, учитывающие эти явления, не имеют простого аналитического описания. Построить их можно по следующим каталожным данным, которые приводятся в современной справочной литературе:
Номинальная мощность двигателя
Номинальная частота вращения (или синхронная частота вращения и номинальное скольжение)
Относительные значения (кратности) максимального (µmax), минимального (µmin), и пускового (µпуск) моментов
Критическое скольжение (допустимо принимать равным: sкр = (4…5)sном))
21 |
22 |
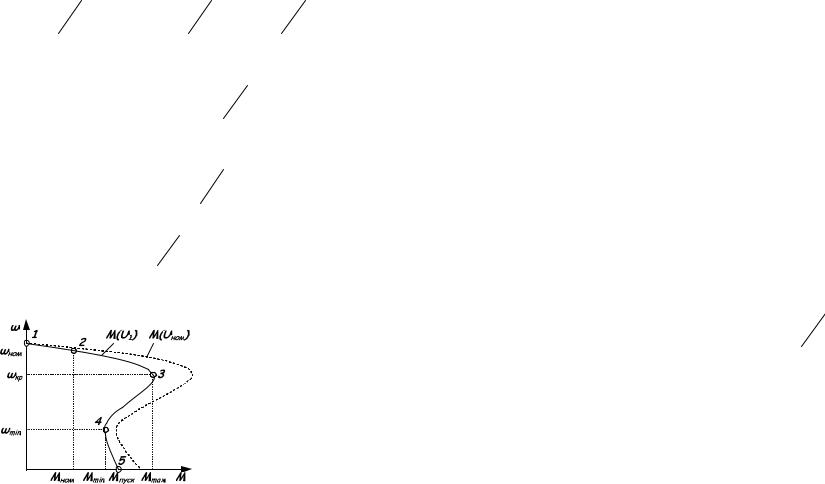
При расчете механической характеристики по каталожным данным с учетом относительно значения напряжения U1/Uном определяются следующие точки:
Точка 1 – режим идеального холостого хода: частота вращения ротора равна частоте вращения поля статора, и машина не развивает вращающего момента: ω2 = ω0; М = 0
Точка 2 – режим работы с номинальной нагрузкой при номинальной частоте вращения:
2 |
2ном |
0 1 sном ; |
|
|
|
|
|
|
|
|
|||
|
U |
|
2 |
Мном |
U |
|
|
2 |
|
Р |
|
|
|
М |
1 |
|
|
1 |
U |
|
|
|
2ном |
|
|
||
|
|
U |
ном |
|
|
|
ном |
|
|
|
2ном |
||
Точка 3 – режим, при котором электродвигатель развивает максимальный вращающий момент:
2 0 1 sкр ; М Мmax U1 Uном 2 max Mном
Точка 4 – соответствует провалу в механической характеристике:
2 |
0,2 0 ; |
М Мmin |
|
U |
|
|
|
2 |
|
|
1 |
|
min Мном |
||||||
|
|
|
|
|
|
|
U |
ном |
|
Точка 5 – соответствует моменту пуска: |
|||||||||
2 |
0; М |
U |
|
|
|
2 |
пуск Мном |
||
Мпуск |
1 |
U |
|
|
|||||
|
|
|
|
ном |
|
|
|
||
Полученная таким образом механическая характеристика показана на рис. 13.
Рисунок 13 – Построение механической характеристики асинхронного электродвигателя по каталожным данным
10 Механическая мощность и рабочие характеристики асинхронных двигателей
Мощность, потребляемую из сети, асинхронные электродвигатели преобразуют в механическую мощность, которая за вычетом потерь сообщается рабочему механизму. На схеме замещения она эквивалентна мощности, выделяемой на переменном резисторе, и может быть записана следующим образом:
|
|
|
|
|
|
|
|
1 s |
|
|
|
|
|
3U2 |
r' |
|
1 s |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|||||||
P М |
|
|
|
3I'2 |
r' |
|
|
|
|
|
|
|
|
|
|
1ф |
|
2 |
|
|
|
|
|
|
|
|
. (36) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
2 |
ЭМ |
|
2 |
2 |
|
2 |
|
s |
|
|
|
|
|
r' |
2 |
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
r |
C |
1 |
|
|
x |
1 |
C |
1 |
x' |
2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
s |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Это уравнение определяет закон изменения механической мощности, который отличен от закона изменения электромагнитного момента. Механическая мощность тождественно равна нулю не только в режиме идеального холостого хода, когда: МЭМ = 0, но и при неподвижном роторе (ω2 = 0).
Введём обозначения, которые позволят упростить в даль-
нейшем запись |
и преобразования формул: r' |
|
s r' |
|
1 s |
; |
|
|
2 |
|
2 s |
||
x'к x'1 C1 x'2 ; |
r'к r'1 C1r'2 , в результате чего получим: |
|||||
|
3U12фr'2 |
s |
|
(37) |
|
Р2 |
r'к С1r'2 s 2 x'к2 . |
||||
|
|||||
Для исследования на экстремум необходимо приравнять к нулю числитель первой производной dP2 dr'2 s :
3U12ф r'к С1r'2 s 2 3U12фr'2 s 2С1r'к 2С12r'2 s 0.
и найти соответствующее решению этого уравнения скольжение. В результате получаем сопротивление r’2(sэн) и энергетически целесообразное скольжение sэн, при которых механическая мощность имеет максимальное значение:
23 |
24 |
r' |
2 |
s |
эн |
r' |
2 |
1 sэн |
|
r'к2 х'к2 |
; s |
эн |
|
|
C1r'2 |
. (38) |
||
|
|
|
||||||||||||||
sэн |
С1 |
|
|
|
||||||||||||
r'к2 x'к2 C1r'2 |
||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||
Знак минус в преобразованиях опущен, поскольку он относится к генераторному режиму, который в данном случае не исследуется. Подстановка этих значений в уравнение (37) дает следующее значение максимальной механической мощности:
Р |
|
|
|
3U12ф |
r'к2 х'к2 |
|
|
|
|
3U12ф |
|
|
|
|
|
. (39) |
|||||
2max |
|
|
|
|
|
|
|
|
|
2С1 r' |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
2 |
|
2 |
|
|||||
|
|
|
|
2 |
|
2 |
|
|
|
|
|
||||||||||
|
|
|
к r' |
х' |
|
x' |
к r' |
х' |
|
||||||||||||
|
|
|
С1 r' |
к |
к |
к |
к |
к |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
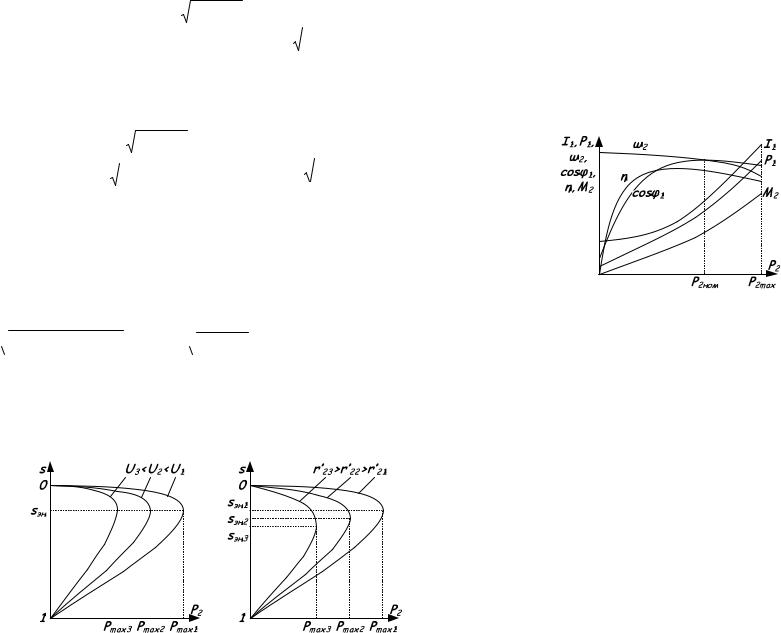
Типовые зависимости механической мощности на валу двигателя от скольжения показаны на рис. 14.
Механическая мощность, как и электромагнитный момент, изменяется пропорционально квадрату напряжения, но ее максимальное значение зависит от активного сопротивления цепи ротора и смещено в сторону меньших скольжений (больших частот вращения): sэн < sкр, поскольку:

 r1 С1r'к 2 x'к2 C1r'2
r1 С1r'к 2 x'к2 C1r'2 
 r12 x'к2 . Скольжение sэн мало зависит от активного сопротивления цепи ротора, а максимум механической мощности при увеличении r’2 уменьшается, что является принципиальным отличием от закономерностей изменения электромагнитного момента.
r12 x'к2 . Скольжение sэн мало зависит от активного сопротивления цепи ротора, а максимум механической мощности при увеличении r’2 уменьшается, что является принципиальным отличием от закономерностей изменения электромагнитного момента.
Рисунок 14 - Типовые зависимости механической мощности двигателя от скольжения при изменениях напряжения (а) и добавочных сопротивлениях в цепи ротора (б)
Отношение Р2max/Р2ном (перегрузочная способность по мощности) в среднем на 20…30% меньше кратности максимального момента.
Рисунок 15 - Типичный вид рабочих характеристик асинхронных электродвигателей
Рабочие характеристики асинхронных двигателей представляют собой зависимости тока в обмотках статора, потребляемой из сети активной мощности, частоты вращения ротора, полезного момента, к.п.д. и коэффициента мощности от полез-
ной мощности: I1 = f(Р2); Р1 = f(Р2); ω2 = f(Р2); M2 = f(Р2); η = f(Р2) cosφ1 = f(Р2); при неизменных значениях питающего напряжения и частоты (рис. 7). Они имеют смысл только в том случае, если двигатель работает устойчиво, при изменении механической мощности в пределах: Р2 = 0 - Р2max ≈ 0 –
(1,3…1,5)Р2ном.
Ток статора при холостом ходе существенно зависит от мощности двигателя, и находится в пределах (0,15…0,2)Iном для двигателей большой мощности и (0,5…0,7)Iном – для маломощных двигателей, что объясняется относительным уменьшением воздушного зазора между статором и ротором с возрастанием мощности и габаритов машины. При небольших нагрузках ток практически не изменяется, поскольку активная составляющая тока ротора также мала. Кроме того, реактивный ток ветви на-
25 |
26 |
магничивания может незначительно уменьшаться вследствие уменьшения насыщения магнитной системы статора.
Активная мощность Р1, потребляемая двигателем из сети в режиме холостого хода равна сумме потерь в обмотке статора, ветви намагничивания и механических потерь. По мере увеличения нагрузки электрические потери в обмотках статора и ротора возрастают пропорционально квадрату тока. Однако, в пределах рабочей области эти потери относительно малы по сравнению с мощностью нагрузки, поэтому зависимость Р1 = f(Р2) имеет слабо выраженный нелинейный характер.
Частота вращения ротора при переходе от режима хо-
лостого хода к режиму номинальной нагрузки линейно уменьшается на 3…5% от частоты вращения, близкой к частоте вращения поля статора ω1, до номинальной частоты вращения. Далее зависимость становится нелинейной, и при Р2 = Р2max частота вращения уменьшается на 10…15%.
Вращающий момент М2 представляет собой разность между электромагнитным моментом и моментом холостого хода: М2 = МЭМ - Мхх, поэтому при Р2 = 0 он также равен нулю. В указанных пределах изменения Р2 можно без заметной погрешности считать: Мхх ≈ const, и с учетом того, что согласно уравнению (24):
М |
ЭМ |
|
РЭМ |
|
Р1 Рэл.1 Рст. |
, |
||
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
||
зависимость M2 = f(P2) по характеру изменения близка к зависимости P1 = f(P2).
При малых скольжениях имеет место неравенство: r’2/s>>x’2, поэтому ток ротора имеет практически активный характер, и при увеличении Р2 до номинального значения коэффициент мощности нелинейно возрастает. Далее скольжение существенно увеличивается, r’2/s и x’2 становятся соизмеримыми, и cosφ1 изменяется незначительно.
Как было показано ранее, асинхронный двигатель с теоретической точки зрения подобен трансформатору, работающему на чисто активную нагрузку, поэтому и зависимость η = f(P2) имеет такой же вид, как у трансформаторов.
27