

отчет практика
.pdfМинистерство образования и науки РФ
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ
(ТУСУР)
Кафедра конструирования и производства радиоаппаратуры
(КИПР)
ОТЧЕТ ПО АЭРОДРОМНОЙ ПРАКТИКЕ
Инструментальная система посадки (ILS-420)
Глиссадный радиомаяк ILS 422
Выполнил студент гр.202
Шляхтичев А.А.___________
Проверил ассистент кафедры КИПР Кривин Н.Н.______________
Томск
2015
Содержание |
|
||
Введение................................................................................................................... |
3 |
||
1 |
Описание и работа ILS......................................................................................... |
5 |
|
2 |
Состав системы ILS-420 ...................................................................................... |
6 |
|
3 |
Параметры навигационных сигналов курсового радиомаяка. ........................ |
9 |
|
4 |
Глиссадный радиомаяк ...................................................................................... |
10 |
|
5 |
Траектория захода на посадку .......................................................................... |
12 |
|
6 |
Технические характеристики ГРМ 1F/2F ....................................................... |
13 |
|
7 |
Организация резервирования............................................................................ |
15 |
|
8 |
Система дистанционного контроля и обслуживания. .................................... |
15 |
|
9 |
Обзор антенной системы ГРМ.......................................................................... |
16 |
|
10 |
Диаграммы направленности глиссадных радиомаяков ............................... |
17 |
|
11 |
Заключение ....................................................................................................... |
20 |
|
12 |
список литературы ........................................................................................... |
21 |
|
12 |
Приложения ...................................................................................................... |
22 |
|
Введение.
Производственная практика является этапом теоретического обучения и
подготовки студентов к профессиональной деятельности в различных
организациях.
Задачи практики состоят в следующем:
-закрепление теоретических и практических знаний, полученных в университете по соответствующей специальности;
-приобретение практических навыков, изучение и участие в деятельности организации по месту прохождения практики;
-практическое ознакомление с объектами будущей трудовой деятельности;
-разработка предложений по совершенствованию работы организации;
-сбор, анализ и обработка необходимых производственных материалов
идокументов для выполнения дипломного проекта в соответствии с выбранной темой.
Целью данной работы является подробный отчет о выполнении заданий,
данных на практику Мною была пройдена летняя аэродромная практика, на
предприятий Казаэронавигация. Республиканское государственное предприятие «Казаэронавигация» является самым крупным провайдером аэронавигационных услуг в Республике Казахстан.
Целью предприятия согласно устава является обеспечение потребностей пользователей воздушного пространства РК в аэронавигационном обслуживании и удовлетворение потребности отрасли гражданской авиации в подготовке авиационного персонала, медицинском обеспечении.
Основными видами деятельности Предприятия являются:
1.Организация и обслуживание воздушного движения в воздушном пространстве РК;
2.Обеспечение безопасности полетов в воздушном пространстве РК;
3.Эксплуатация радиотехнического обеспечения полетов и связи;
4.Обеспечение аэронавигационной информацией пользователей воздушного пространства РК
Практика проходила в таком то таком филиале. Который обслуживает непосредственно Аэропорт «Алматы» .
Аэропорт «Алматы» ( (IATA: ALA, ICAO: UAAA)) —
международный аэропорт Алматы, первый по объему пассажиропотока в Казахстане. Расположен в северной части города, в 15 километрах от центра Алматы. Эксплуатацию аэропорта осуществляет АО «Международный аэропорт
С 24 по 30 ноября 2011 года эксперты Межгосударственного авиационного комитета (МАК) и Комитета гражданской авиации минтранскома РК провели сертификацию аэродрома на соответствие метеоминимуму по категории IIIB ICAO. Установка категории IIIB ИКАО в аэропорту «Алматы» является первой на всем постсоветском пространстве.
Это ставит его в один ряд с лучшими аэропортами мира по техническому оснащению. По итогам 2014 года аэропорт обслужил 4 589 000 пассажиров.
Аэродром аэропорта — внеклассный, пригоден для эксплуатации всех типов воздушных судов. Аэропорт располагает ВПП с асфальто-
армобетонным покрытием. 30 сентября 2008 г. в международном аэропорту Алматы состоялось открытие второй взлетно-посадочной полосы (ВПП-2),
оснащенной современным аэронавигационным оборудованием. Взлетно-
посадочная полоса длиной 4,5 километра и шириной 60 метров способна принимать все типы воздушных судов без ограничения, как по максимальной взлетной массе, так и по интенсивности полетов, оснащенна современным аэронавигационным оборудованием.
1 Описание и работа ILS
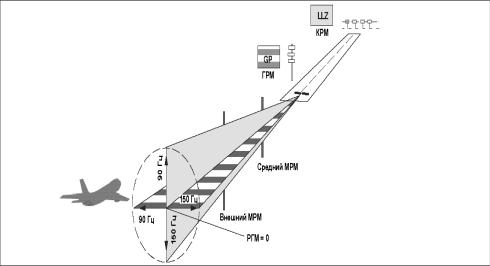
Система ILS (инструментальная система посадки) является международным признанным навигационным средством обеспечения захода на посадку и посадки. Она состоит из курсового радиомаяка (глиссадного радиомаяка и нескольких маркерных радиомаяков (внешнего - ОМ, среднего
- MM и применяемого в особых случаях внутреннего - IM), которые излучают радиосигналы независимо и непрерывно. КРМ обеспечивает информацию наведения в горизонтальной плоскости, ГРМ – в вертикальной,
МРМ – информацию о дальности до порога ВПП. Управление указанными радиомаяками и их проверка может осуществляться с команднодиспетчерского пункта (КДП). Работа КРМ и ГРМ основана на измерении разности глубин модуляции РГМ несущей частоты двумя сигналами с частотами 90 Гц и 150 Гц. Эти, так называемые, навигационные частоты используются для определения точного курса захода на посадку, при котором РГМ равна нулю, и заданного угла снижения (угла наклона глиссады), при котором РГМ также равна нулю. КРМ работает в диапазоне частот 108...112 МГц, формирует вертикальную плоскость наведения по курсу и позволяет пилоту ВС маневрированием вправо/влево выбрать точный курс захода на посадку на расстояниях до 30 км от ВПП. Диаграмма направленности антенны КРМ обеспечивает в плоскости наведения равенство амплитуд обеих частот модуляции 90 Гц и 150 Гц. Если (при наблюдении с борта) ВС уклоняется влево в поперечном направлении от плоскости наведения, то на борту ВС будет зарегистрировано преобладание составляющей с частотой 90 Гц, а при отклонении вправо - с частотой 150 Гц
(Рис. 1-1). ГРМ работает на частотах 328...336 МГц, формирует плоскость наведения по глиссаде, которая составляет с плоскостью ВПП заданный угол наклона глиссады. Диаграмма направленности антенны ГРМ формируется в результате взаимодействия излучаемых сигналов с сигналами, отраженными от земной поверхности. При этом ниже плоскости глиссады преобладает частота модуляции 150 Гц, а выше - частота 90 Гц. На самой же плоскости
глиссады амплитуды обеих частот равны. Луч, который указывает ВС направление захода на посадку, образуется в результате пересечения вертикальной плоскости наведения по курсу с почти горизонтальной плоскостью глиссады. Дополнительно требуемая при заходе на посадку информация о расстоянии до порога ВПП может быть получена от маркерных радиомаяков. Передатчики этих маяков излучают на одной и той же несущей частоте свои позывные в виде кода Морзе и отличаются частотой модуляции (Рис. 1).
Основные особенности аппаратуры семейства NAV 400 и, в
частности, системы ILS420 заключаются в следующем: Высокая степень совместимости: электронное оборудование системы ILS420 совместимо со многими типами антенных систем, выпускаемых компанией Thales ATM.
Оно также совместимо с выпускаемыми ранее типами антенных систем (SEL,
Alcatel Air Navigation System, Face, Thomson-CSF и Wilcox). Такая гибкость способствует экономичной модернизации, позволяя комбинировать электронное оборудование ILS420 с уже существующими антенными системами. Высокая выходная мощность: регулируемая выходная мощность ГРМ (5 Вт) и КРМ (25 Вт) обеспечивает требуемую зону действия в различных местах установки с различными типами антенных систем;
Гибкость конфигурации: система ILS420 удовлетворяет различным требованиям размещения. Имеются множество конфигураций, которые комбинируются для удовлетворения требованиям заказчика, начиная с категории I и завершая категорией III.
2 Состав системы ILS-420
Система ILS состоит из следующих основных составных частей: -
курсовой радиомаяк КРМ ;
-глиссадный радиомаяк ГРМ ;
-маркерные радиомаяки МРМ (MM, OM); и дополнительного
оборудования: - радиодальномер
- монитор поля курсового радиомаяка в дальней зоне
Расположение этих функциональных групп относительно ВПП показано на (Рис 2.) Такое построение системы применимо как для одночастотного варианта, так и для двухчастотного (1F, 2F).
Рисунок 1. Измерение РГМ.
Антенна КРМ расположена на расстоянии 200...360 м за ВПП на продолжении ее осевой линии. Работающий на антенну передатчик КРМ находится в монтажном боксе вблизи антенны. Антенна ГРМ смещена на расстояние 120...180 м в перпендикулярном направлении относительно осевой линии ВПП и находится рядом с ней. Стандартное значение высоты глиссады над порогом ВПП равно 15 м. Расстояние D (286...344 м) между мачтой антенны ГРМ и порогом ВПП вычисляется, исходя из этого значения высоты и угла наклона глиссады, который выбирается с учетом местных условий. Передатчик ГРМ, с которым работает антенна, расположен в монтажном боксе в непосредственной близости к антенне. Внутренний маркерный радиомаяк находится на подходе к ВПП на расстоянии 75...450 м
от порога ВПП, на продолжении ее осевой линии; средний маркерный радиомаяк (MM) - на расстоянии 1050 м, а внешний (OM) - на расстоянии
7200 м, соответственно. В большинстве случаев используются лишь внешний

и средний маркерный радиомаяки. При совместном использовании МРМ и
DME возможны несколько вариантов установки, например:
-антенна DME установлена на антенной мачте ГРМ
(приемоответчик DME находится в боксе ГРМ);
- антенна DME установлена на крыше бокса КРМ (приемоответчик
DME находится в боксе КРМ);
- приемоответчик DME находится в отдельном боксе, антенна DME
установлена на его крыше;
- приемоответчик DME находится в отдельном боксе, антенна DME
установлена на отдельной мачте.
Последние два варианта более предпочтительны, так как они позволяют заходить на посадку с двух направлений. Монтажный бокс располагается в непосредственной близости к ВПП на отметке половины ее длины. Время пробега по ВПП от точки приземления до DME учитывается в расчетах и точка приземления точно соответствует дальности 0 м.
Рисунок 2. Расположение системы ILS
3 Параметры навигационных сигналов курсового радиомаяка.
Курсовой радиомаяк излучает радиочастотные сигналы в диапазоне
108...112 МГц, модулированные по амплитуде синусоидальными сигналами частоты 90 Гц и 150 Гц. Зона приема этих сигналов, в которой обеспечивается возможность определения на борту ВС плоскости курса, при штатных антенне и передатчике в вариантах 2F (мощность передатчика 25
Вт) и 1F (мощность передатчика 30 Вт), следующая: дальность - не менее 25
морских миль (примерно 46 км) в секторе ±10° относительно линии курса по азимуту, и не менее 17 морских миль (примерно 31 км) в секторе ±35°
относительно линии курса по азимуту. Характерные значения информативного параметра КРМ - разности глубин модуляции DDM (РГМ) в
соответствующих секторах относительно осевой линии ВПП следующие:
-РГМ = 0;
-РГМ = 15.5% (0.155);
-РГМ ≥ 18% (0.18).
РГМ равна 0, когда направление захода на посадку точно соответствует направлению осевой линии ВПП. РГМ=15.5% соответствует такому сектору курса, границы которого у порога ВПП находятся на расстоянии 107 м влево и вправо от осевой линии. Эти точки соответствуют ширине (WIDTH) сектора курса, в которой имеется линейная зависимость РГМ от величины отклонения с коэффициентом пропорциональности 0.145%
на метр, что и дает в результате полуширину сектора курса, равную 107 м
для РГМ, равной 15.5%. Приложение 10 ИКАО (4-е издание, апрель 1985,
Раздел 3.1.3.7.3, Примечание 1) предполагает номинальную ширину сектора,
равную 210 м (700 футов).
РГМ ≥ 18% характерна для сектора более ±10°, а РГМ ≥ 15.5% - для сектора, соответствующего углам от ±10° до ±35°, в пределах которого еще возможно получение точной информации о курсе. В варианте LLZ-1F работа в этом секторе обеспечивается за счет соответствующей диаграммы
направленности антенны, а в варианте LLZ-2F - с помощью излучения дополнительного РЧ-сигнала - сигнала клиренса. Информация о курсе содержится в сигнале, амплитудно-модулированном напряжениями частоты
90 Гц и 150 Гц. Если ВС заходит на посадку и выдерживает правильный курс, в бортовом приемнике КРМ сигналы обеих частот модуляции имеют равную амплитуду, что соответствует РГМ=0. Если имеется отклонение от заданного курса влево, то преобладает составляющая частоты 90 Гц, а при отклонении вправо - составляющая частоты 150 Гц.
4 Глиссадный радиомаяк
Глиссадный радиомаяк излучает амплитудно-модулированные радиочастотные сигналы в диапазоне 328...336 МГц с частотами модуляции
90 Гц и 150 Гц. Зона приема этих сигналов, в которой обеспечивается возможность определения на борту ВС плоскости глиссады, при штатных антенне и передатчике в вариантах 2F и 1F (мощность передатчика в обоих вариантах равна 5 Вт), следующая: дальность - не менее 10 морских миль
(примерно 18.5 км) в азимутальном секторе ±8° относительно курсовой линии, принимая за опорную точку точку приземления; угол места - сектор от 0.3 θ до 1.75 θ, где θ - номинальное значение угла наклона глиссады. При уменьшении угла места ниже линии глиссады значение РГМ плавно возрастает, достигая 22%, и при дальнейшем снижении до углов места
0.45...0.3 θ остается близкой к этому значению, как это требуется для безопасного наведения по глиссаде. Характерные значения информативного параметра ГРМ - разности глубин модуляции DDM (РГМ) в указанном секторе относительно осевой линии ВПП следующие:
-РГМ = 0;
-РГМ = 17.5% (0.175);
-θ = 2.5...3° (типичное значение).
Линия на плоскости, для которой РГМ=0, образованная излучением антенной ГРМ соответствующих сигналов, является гиперболой,
которая не касается поверхности земли, как это показано на Рис. 1-4