

Построение блока управления
Устройство управления вообще и блок управления АЛУ в частности могут строиться или на принципе микропрограммирования (программируемая логика), или на принципе с жесткой логикой (аппаратный принцип). В любом случае удобной формой задания поведения управляемого объекта является кодированная ГСА.
При использовании микропрограммного принципа, выработка необходимой последовательности сигналов управления имеющимся объектом выполняется за счет реализации микропрограммы, разработанной в соответствии с заданной ГСА. При использовании аппаратного принципа, блок управления строится в виде цифрового автомата, который, построенный в соответствии с заданной ГСА, вырабатывает последовательность выходных сигналов, используемых для управления объектом.
Аппаратный принцип построения блока управления.
Блок управления аппаратного принципа может строиться или на базе цифрового автомата Мили или Мура. Наличие большого количества входных сигналов и состояний цифрового автомата, а также значительного числа пар «входной сигнал - состояние» делает затруднительным использования классического подхода синтеза цифрового автомата, рассмотренного в разделе «Элементы теории цифровых автоматов». Поэтому в данном случае синтез цифрового автомата, реализующего блок управления, осуществляется по несколько отличному принципу и включает следующие этапы:
построение графа выбранного типа цифрового автомата на основе ГСА функционирования имеющегося объекта;
составление объединенной кодированной таблицы переходов и выходов цифрового автомата;
составления логических выражений для сигналов управления памятью и выходных сигналов цифрового автомата;
синтез логических схем на основании полученных логических выражений в заданном логическом базисе.
Построение управления на базе автомата Мура
Рассмотрим построение управления на базе автомата Мура для объекта, работа которого задается ГСА, приведенной на .
Формирование графа автомата Мура, соответствующего ГСА выполнения операции в управляемом объекте, выполняется следующим образом:
объединяются операционные вершины ГСА, для которых имеет место однозначная связь по входу и выходу, при условии, что результат выполнения микрооперации в предыдущей вершине не используется при выполнении микрооперации в последующей вершине;
устраняются замкнутые пути из одной логической вершины ГСА в другую логическую вершину, минуя операторные вершины, посредством введения в этот путь пустой операторной вершины;
каждой операторной вершине ГСА ставится в соответствие вершина графа автомата Мура.
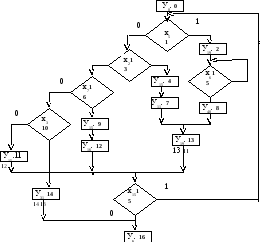
Используя указанные правила, ГСА на преобразуется в граф автомата
Мура, приведенный на Error: Reference source not found. Вершинами графа Аi являются операционные вершины исходной ГСА. Данный граф формируется из исходной при условии, что микрооперации У4 и У11 допускают одновременное выполнение; через Уп обозначена фиктивная (пустая, т.е. «ничего не делать») микрооперация. Микрооперация У0 выполняется при инициализации цифрового автомата.
Вершинами графа Аi являются операционные вершины исходной ГСА. Данный граф формируется из исходной при условии, что микрооперации У4 и У11 допускают одновременное выполнение; через Уп обозначена фиктивная (пустая, т.е. «ничего не делать») микрооперация. Микрооперация У0 выполняется при инициализации цифрового автомата.
Объединенная кодированная таблица переходов и выходов цифрового автомата строится за счет нахождения всех существующих путей из каждой вершины имеющегося графа в ближайшую другую вершину с указанием условий, при которых имеет место данный путь, и вырабатываемых выходных сигналов, которые в автомате Мура однозначно определяются конечным состоянием (конечной вершиной пути):
Аi{xss, xpp ... xff, уn(А J),... уm(А J)} А J,
где:
Аi, АJ - соответственно, начальная и конечная вершина пути;
xss, xpp ... xff - условия, через которые проходит рассматриваемый путь из Аi в АJ;
уn(А J),... уm(А J) - выходные сигналы автомата, однозначно зависящие от конечного состояния АJ.
.
Рис. 3.4‑73
Объединенной кодированной таблицы переходов и выходов цифрового автомата составляется на основе всех возможных путей из всех вершин графа автомата. В Таблица 3.4 -18 приведена объединенная кодированная таблицы переходов и выходов для графа автомата Мура.
При формировании этой таблицы использовалась кодировка состояний цифрового автомата двоичными эквивалентами их индексов, а разряды четырех битового кода состояния обозначены как Q1Q2Q3Q4. В качестве элемента памяти использован D-триггер, имеющий вход qD1.
Каждому из имеющихся путей из вершин графа автомата в таблице соответствует одна строка, что позволяет кодировать код начала пути (четырех битовый код в графе 3) и условие (подмножество условий, лежащих на этом пути, в графе 6) единым числом - номером соответствующей строки в таблице.
.
Рис. 3.4‑74
.
Таблица 3.4‑18
|
N |
Начало пути |
Конец пути |
логическое |
выход. |
Управление памятью | |||||
|
п.п |
Ан |
код Ан Q1 Q2 Q3Q4 |
Ак |
код Ак Q1 Q2 Q3Q4 |
условие |
сигнал |
qD1 |
qD2 |
qD3 |
qD4 |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
1 |
A0 |
0000 |
A8 |
1000 |
_ _ _ _ х1 х3 х5 х7 |
У15 |
1 |
0 |
0 |
0 |
|
2 |
|
|
A9 |
1001 |
_ _ _ х1 х3 х5 х7 |
У31 |
1 |
0 |
0 |
1 |
|
3 |
|
|
A6 |
0110 |
_ _ х1 х5 х7 |
У15. У16 |
0 |
1 |
1 |
0 |
|
4 |
|
|
A3 |
0011 |
_ х1 х5 |
У15. |
0 |
0 |
1 |
1 |
|
5 |
|
|
A1 |
0001 |
х5 |
У19. |
0 |
0 |
0 |
1 |
|
6 |
A1 |
0001 |
A5 |
0101 |
_ х6 |
У40 |
0 |
1 |
0 |
1 |
|
7 |
|
|
A2 |
0010 |
х6 |
- |
0 |
0 |
1 |
0 |
|
8 |
A2 |
0010 |
A5 |
0101 |
_ х6 |
У40 |
0 |
1 |
0 |
1 |
|
9 |
|
|
A2 |
0010 |
х6 |
- |
0 |
0 |
1 |
0 |
|
10 |
A3 |
0011 |
A4 |
0100 |
1 |
У11. |
0 |
1 |
0 |
0 |
|
11 |
A4 |
0100 |
A7 |
0111 |
1 |
У19 |
0 |
1 |
1 |
1 |
|
12 |
A5 |
0101 |
A7 |
0111 |
1 |
У19 |
0 |
1 |
1 |
1 |
|
13 |
A6 |
0110 |
A10 |
1010 |
_ х 15 |
Ук |
1 |
0 |
1 |
0 |
|
14 |
|
|
A8 |
1000 |
_ _ _ _ х1х3х5х7х15 |
У15 |
1 |
0 |
0 |
0 |
|
15 |
|
|
A9 |
1001 |
_ _ _ х1х3х5 х7х15 |
У31 |
1 |
0 |
0 |
1 |
|
16 |
|
|
A6 |
0110 |
_ _ х1 х5 х7х 15 |
У15. У16. |
0 |
1 |
1 |
0 |
|
17 |
|
|
A3 |
0011 |
_ х1 х5 х 15 |
У15. |
0 |
0 |
1 |
1 |
|
18 |
|
|
A1 |
0001 |
х5 х 15 |
У19. |
0 |
0 |
0 |
1 |
|
19 |
A7 |
0111 |
A10 |
1010 |
_ х 15 |
Ук |
1 |
0 |
1 |
0 |
|
20 |
|
|
A8 |
1000 |
_ _ _ _ х1х3х5х7х15 |
У15 |
1 |
0 |
0 |
0 |
|
21 |
|
|
A9 |
1001 |
_ _ _ х1х3х5х7х15 |
У31 |
1 |
0 |
0 |
1 |
|
22 |
|
|
A6 |
0110 |
_ _ х1 х5 х7х 15 |
У15. У16 |
0 |
1 |
1 |
0 |
|
23 |
|
|
A3 |
0011 |
_ х1 х5 х 15 |
У15. |
0 |
0 |
1 |
1 |
|
24 |
|
|
A1 |
0001 |
х5 х 15 |
У19. |
0 |
0 |
0 |
1 |
|
25 |
A8 |
1000 |
A10 |
1010 |
_ х 15 |
Ук |
1 |
0 |
1 |
0 |
|
26 |
|
|
A8 |
1000 |
_ _ _ _ х1х3х5х7х15 |
У15 |
1 |
0 |
0 |
0 |
|
27 |
|
|
A9 |
1001 |
_ _ _ х1х3х5х7х15 |
У31 |
1 |
0 |
0 |
1 |
|
28 |
|
|
A6 |
0110 |
_ _ х1 х5 х7х 15 |
. У15. У16 |
0 |
1 |
1 |
0 |
|
29 |
|
|
A3 |
0011 |
_ х1 х5 х 15 |
У15. |
0 |
0 |
1 |
1 |
|
30 |
|
|
A1 |
0001 |
х5 х 15 |
У19. |
0 |
0 |
0 |
1 |
|
31 |
A9 |
1001 |
A10 |
1010 |
1 |
Ук. |
1 |
0 |
1 |
0 |
На основании составленной таблицы логические выражения для выходных сигналов и сигналов управления памятью имею вид:
|
У11= |
_ _ _ Q1Q2Q3Q4; |
|
|
|
|
|
| |||||||||||||||||||||||||
|
У15= |
. _ _ _ Q1Q2Q3Q4, + |
_ _ Q1Q2Q3Q4, + |
_ _ Q1Q2Q3Q4, |
|
|
|
| |||||||||||||||||||||||||
|
У16= |
_ _ Q1Q2Q3Q4, |
|
|
|
|
|
| |||||||||||||||||||||||||
|
У19.= |
_ Q1Q2Q3Q4,+ |
_ _ _ Q1Q2Q3Q4, |
|
|
|
|
| |||||||||||||||||||||||||
|
У31= |
. _ _ Q1Q2Q3Q4, |
|
|
|
|
|
| |||||||||||||||||||||||||
|
У40.= |
_ _ Q1Q2Q3Q4, |
|
|
|
|
|
| |||||||||||||||||||||||||
|
Ук= |
Q1Q2Q3Q4, |
|
|
|
|
|
| |||||||||||||||||||||||||
|
qD1= |
_ _ _ _ _ _ _ _ Q1Q2Q3Q4х1х3х5х7 + |
_ _ _ _ _ _ _ Q1Q2Q3Q4х1х3х5 х7+ |
_ _ _ Q1Q2Q3Q4х15 + |
_ _ _ _ _ _ Q1Q2Q3Q4х1 х3 х5 х7х15+
| ||||||||||||||||||||||||||||
|
+ |
_ _ _ _ _ Q1Q2Q3Q4х1 х3 x5 х7х15+ |
. _ _ _ _ Q1Q2Q3Q4 х15+ |
. _ _ _ _ _ _ _ Q1Q2Q3Q4х1х3х5х7 х 15+ |
. _ _ _ _ _ _ Q1Q2Q3Q4х1х3х5х7х 15 + | ||||||||||||||||||||||||||||
|
. + |
_ _ Q1Q2Q3Q4 х15 + |
_ _ _ _ _ Q1Q2Q3Q4х1 х3x5 х7х15 + |
_ _ _ _ Q1Q2Q3Q4х1 х3x5x7х15+ |
_ _ Q1Q2Q3Q4 | ||||||||||||||||||||||||||||
|
|
(1,2,13,14,15,19,20,21,25,26,27,31) |
|
| |||||||||||||||||||||||||||||
|
|
|
|
|
| ||||||||||||||||||||||||||||
|
qD2= |
_ _ _ _ _ _ Q1Q2Q3Q4х1х5 х7 + |
_ _ _ _ Q1Q2Q3Q4х6 + |
_ _ _ _ Q1Q2Q3Q4х6 + |
_ _ _ _ _ Q1Q2Q3Q4+Q1Q2Q3Q4 + | ||||||||||||||||||||||||||||
|
+ |
_ _ Q1Q2Q3Q4 + |
_ _ _ _ Q1Q2Q3Q4х1х5 х7х 15 + |
_ _ _ Q1Q2Q3Q4х1х5 х7х 15 + |
_ _ _ _ _ Q1Q2Q3Q4х1 х5 х7х 15; | ||||||||||||||||||||||||||||
|
|
(3,6,8,10,11,12,16, 22, 28) |
|
| |||||||||||||||||||||||||||||
|
qD3= |
_ _ _ _ _ _ Q1Q2Q3Q4х1 х5 х7 + |
_ _ _ _ _ Q1Q2Q3Q4х1 х5 + |
_ _ _ _ Q1Q2Q3Q4х6 + |
_ _ _ Q1Q2Q3Q4х6 + | ||||||||||||||||||||||||||||
|
+ |
_ _ _ _ _ Q1Q2Q3Q4+Q1Q2Q3Q4+ |
_ _ _ Q1Q2Q3Q4 х15 + |
_ _ _ _ Q1Q2Q3Q4х1 х5 х7х15+ |
_ _ _ Q1Q2Q3Q4х1 х5х15 + | ||||||||||||||||||||||||||||
|
. + |
_ _ Q1Q2Q3Q4х15 + |
_ _ _ Q1Q2Q3Q4х1 х5 х7х15 + |
_ _ Q1Q2Q3Q4х1 х5х15 + |
_ _ _ _ Q1Q2Q3Q4 х15 + | ||||||||||||||||||||||||||||
|
+ |
. _ _ _ _ _ Q1Q2Q3Q4х1 х5 х7х15+ |
_ _ _ _ Q1Q2Q3Q4х1х5х15 + |
_ _ Q1Q2Q3Q4 + |
. _ _ Q1Q2Q3Q4; | ||||||||||||||||||||||||||||
|
|
(3,4,7,9,11,12, 16,17,19,22,23,25,28,29,13,,31 |
|
| |||||||||||||||||||||||||||||
|
qD4= |
_ _ _ _ _ _ _ Q1Q2Q3Q4х1х3 х5 х7 + |
_ _ _ _ _ Q1Q2Q3Q4х1х5 + |
_ _ _ _ Q1Q2Q3Q4х5 + |
_ _ _ _ Q1Q2Q3Q4х6 + | ||||||||||||||||||||||||||||
|
+ |
_ _ _ _ Q1Q2Q3Q4х6 + |
_ _ _ _ _ Q1Q2Q3Q4+ Q1Q2Q3Q4+ |
_ _ _ _ _ Q1Q2Q3Q4х1х3х5 х7х15+ |
_ _ _ Q1Q2Q3Q4х1 х5 х15 + | ||||||||||||||||||||||||||||
|
+ |
_ _ Q1Q2Q3Q4 х5 х15 + |
_ _ _ _ Q1Q2Q3Q4х1 х3х5 х7х 15 + |
_ _ Q1Q2Q3Q4х1 х5 х 15 + |
_ Q1Q2Q3Q4 х5 х 15 + | ||||||||||||||||||||||||||||
|
+ |
_ _ _ _ _ _ Q1Q2Q3Q4х1х3х5х7 х 15+ |
_ _ _ _ Q1Q2Q3Q4х1х5 х 15 + |
_ _ _ Q1Q2Q3Q4х5 х 15 . |
| ||||||||||||||||||||||||||||
|
|
(2,4,5,6,8,11,12,15,17,18,21,23,24,27,29,30). |
|
| |||||||||||||||||||||||||||||
После записи дизъюнктивной логической функций для сигналов управления разрядами памяти в скобках приведен перечень кодов используемых в этом выражении конъюнкций (номеров строк).
Построение логической схемы цифрового автомата на базе ПЛМ будет рассмотрено на примере построения автомата Мили.
Построение управления на базе автомата Мили
Рассмотрим построение управления на базе автомата Мили для объекта, работа которого задается ГСА, приведенной на .
Формирование графа автомата Мили, соответствующего ГСА выполнения операции в управляемом объекте, осуществляется следующим образом:
объединяются операционные вершины ГСА, для которых имеет место однозначная связь по входу и выходу, при условии, что результат выполнения микрооперации в предыдущей вершине не используется при выполнении микрооперации в последующей вершине;
устраняются замкнутые пути из одной логической вершины ГСА в другую логическую вершину, минуя операторные вершины, посредством введения в этот путь пустой операторной вершины;
во множество вершин графа автомата Мили включают начальную и конечную вершины ГСА;
кроме того, в качестве вершин графа автомата рассматриваются выходы операционных вершин ГСА (если выходы операционных вершин сходятся, то они рассматриваются как одна вершина графа цифрового автомата).
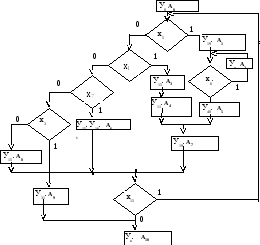
Используя указанные правила, ГСА на , преобразуется в граф автомата Мили, приведенный на . Данный граф формируется из исходной ГСА при условии, что микрооперации У4 и У11 допускают одновременное выполнение, а через Уп обозначена фиктивная вершина, содержащая пустую микрооперацию.
Микрооперация У0 выполняется при инициализации цифрового автомата.
На основании графа автомата Мили, объединенная кодированная таблица переходов и выходов цифрового автомата строится за счет нахождения всех существующих путей из каждой вершины графа в другую вершину с указанием условий, при которых имеет место данный путь. Кроме того, для всех путей находятся выходных сигналов, которые определяются микрооперациями, указанными в операционной вершинах, через которую проходит данный путь:
Аi{xss, xpp ...xff, уn ,.. уn}А J, где
Аi, АJ - соответственно, начальная и конечная вершина пути;
xss, xpp ...xff - условия, через которые проходит рассматриваемый путь из одной вершины графа автомата Мура в другую;
уn,...уn - выходные сигнал автомата, определяемые операционной вершиной, через которую проходит путь.
.
Рис. 3.4‑75
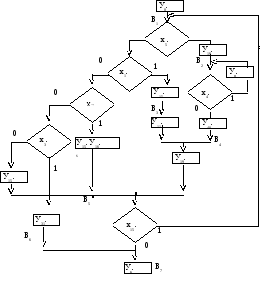
На пример, для вершины В2 имеют место два путя:
. _
В2{х6, У40}В4;
В2{х6, Уп}В2.
Объединенной кодированной таблицы переходов и выходов цифрового автомата составляется на основе всех существующих путей из вершин графа автомата. В Таблица 3.4 -19 приведена объединенной кодированной таблицы переходов и выходов для графа автомата Мили, приведенного на .
Таблица 3.4‑19
|
N
|
Начало пути |
Конец пути |
логическое |
вых.
|
Упр.памятью | ||||
|
п.п. |
B(t) |
код B(t) |
B(t+1) |
код А(t+1) |
условие |
сигнал |
qD1 |
qD2 |
qD3 |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
1 |
В1 |
001 |
В5 |
101 |
_ _ _ _ х1х3х5х7 |
У15. |
1 |
0 |
1 |
|
2 |
|
|
В6 |
110 |
_ _ _ х1х3х5х7 |
У31. |
1 |
1 |
0 |
|
3 |
|
|
В5 |
101 |
_ _ х1х5х7 |
. У15. У16 |
1 |
0 |
1 |
|
4 |
|
|
В3 |
011 |
_ х1х5 |
У15. |
0 |
1 |
1 |
|
5 |
|
|
В2 |
010 |
х5 |
У19. |
0 |
1 |
0 |
|
6 |
В2 |
010 |
В4 |
100 |
_ х6. |
У40. |
1 |
0 |
0 |
|
7 |
|
|
В2 |
100 |
х6. |
- |
0 |
1 |
0 |
|
8 |
В3 |
011 |
В4 |
100 |
1 |
У11. |
1 |
0 |
0 |
|
9 |
В4 |
100 |
В5 |
101 |
1 |
У19 |
1 |
0 |
1 |
|
10 |
В5 |
101 |
В7 |
111 |
_ х15 |
Ук. |
1 |
1 |
1 |
|
11 |
|
|
В5 |
101 |
_ _ _ _ х1х3х5х7х 15 |
У15. |
1 |
0 |
1 |
|
12 |
|
|
В6 |
110 |
_ _ _ х1х3х5х7х15 |
У31. |
1 |
1 |
0 |
|
13 |
|
|
В5 |
101 |
_ _ х1х5х7х15 |
У15. У16 |
1 |
0 |
1 |
|
14 |
|
|
В3 |
011 |
. _ х1х5х15 |
У15. |
0 |
1 |
1 |
|
15 |
|
|
В2 |
010 |
х5х15 |
У19. |
0 |
1 |
0 |
|
16 |
В6 |
110 |
В7 |
111 |
1 |
Ук. |
1 |
1 |
1 |
При формировании этой таблицы использовалась кодировка состояний цифрового автомата двоичными эквивалентами их индексов. В качестве элемента памяти использован D- триггер.
На основании составленной таблицы логические выражения для выходных сигналов и сигналов управления памятью имею вид:
|
У11.= |
_ Q1Q2Q3. |
. (8) |
|
| ||||||||||||||
|
У15= |
_ _ _ _ _ _ Q1Q2Q3х1х3х5х7+ |
_ _ _ _ Q1Q2Q3х1х5х7+ |
_ _ _ Q1Q2Q3х1х5, + |
_ _ _ _ _ _ Q1Q2Q3х1х3х5х7х15+ | ||||||||||||||
|
+ |
_ _ _ _ Q1Q2Q3х1х5х7х15+ |
_ _ _ Q1Q2Q3х1х5х15; |
(1,3,4,11,13,14) |
| ||||||||||||||
|
У16. = |
_ _ _ _ Q1Q2Q3х1х5х7+ |
_ _ _ _ Q1Q2Q3х1х5х7х15. |
(3,13) |
| ||||||||||||||
|
У19.= |
_ _ Q1Q2Q3х5+ |
. _ _ Q1Q2Q3+ |
. _ Q1Q2Q3х5х15, |
(5,9,15) | ||||||||||||||
|
У31= |
_ _ _ _ _ Q1Q2Q3х1х3х5х7+ |
. _ _ _ _ Q1Q2Q3х1х3 х5х7х15; |
(2,12) |
| ||||||||||||||
|
У40.= |
_ _ _ Q1Q2Q3х6. |
(6) |
|
| ||||||||||||||
|
Ук.= |
. _ _ Q1Q2Q3 х15+ |
. _ Q1Q2Q3; |
(10,16) |
| ||||||||||||||
|
qD1= |
_ _ _ _ _ _ Q1Q2Q3х1х3х5х7+ |
_ _ _ _ _ Q1Q2Q3х1 х3х5 х7+ |
_ _ _ _ Q1Q2Q3х1 х5 х7+ |
_ _ _ Q1Q2Q3х6.+ | ||||||||||||||
|
+ |
|
_ _ _ Q1Q2Q3+ Q1Q2Q3+ |
. _ _ Q1Q2Q3х15+ |
. _ _ _ _ _ Q1Q2Q3х1х3х5х7х15+ | ||||||||||||||
|
+ |
. _ _ _ _ Q1Q2Q3х1х3х5х7х15+ |
. _ _ _ Q1Q2Q3х1х5х7х15+ |
. _ Q1Q2Q3 |
(1,2,3,6,8,9,10,11,12,13,16) | ||||||||||||||
|
qD2= |
_ _ _ _ _ Q1Q2Q3х1х3х5х7+ |
_ _ _ Q1Q2Q3х1х5+ |
_ _ Q1Q2Q3х5+ |
_ _ Q1Q2Q3х4+ | ||||||||||||||
|
+ |
. _ _ Q1Q2Q3х15+ |
. _ _ _ _ Q1Q2Q3х1х3х5х7х15+ |
. _ _ Q1Q2Q3х1х5 х15+ |
. _ Q1Q2Q3 х5х15+ | ||||||||||||||
|
+ |
. _ Q1Q2Q3; |
(2,4,5,7,10,12,14,15,16) |
|
| ||||||||||||||
|
qD3= |
_ _ _ _ _ _ Q1Q2Q3х1х3х5х7+ |
_ _ _ _ Q1Q2Q3х1 х5 х7+ |
_ _ _ Q1Q2Q3х1 х5 + |
. _ _ Q1Q2Q3+ | ||||||||||||||
|
+ |
. _ _ Q1Q2Q3х15 + |
_ _ _ _ _ Q1Q2Q3 х1х3х5х7х15+ |
. _ _ _ Q1Q2Q3х1х5х7х15+ |
. _ _ Q1Q2Q3х1х5х15+ | ||||||||||||||
|
+ |
. _ Q1Q2Q3. |
(1,3,4,9,10,11,13,14,16) |
|
| ||||||||||||||
После записи дизъюнктивной логической функций для выходных сигналов и сигналов управления разрядами памяти в скобках приведен перечень кодов используемых в этом выражении конъюнкций. В качестве этих кодов использованы номера строк в таблице, в которых отражается соответствующий путь.
На приведена логическая схема, реализующая цифровой автомат, заданный графом на .
На вход схемы поступают проверяемые условия х1, х3, х5, х6, х7, х15. Обратные значения этих условий формируются с помощью шести схем НЕ.
На схеме каждый выход конъюнктивной части ПЛМ (горизонтальные линии) помечен кодом конъюнкции (номером строки в таблице), формируемой на этом выходе.
Выходом схемы является множество сигналы микроопераций у11, у15, у16, у31, у40, ук.
Выбор типа цифрового автомата (Мили или Мура) зависит от реализуемой ГСА. В тех случаях, когда имеет место много сходящихся ветвей процесса, предпочтение следует отдавать автомату Мили, так как у него будет меньше вершин-состояний, чем у эквивалентного автомата Мура (сравните Таблица 3.4 -18 и Таблица 3.4 -19). В тех же случаях, когда в ГСА имеет место большое количество длинных линейных
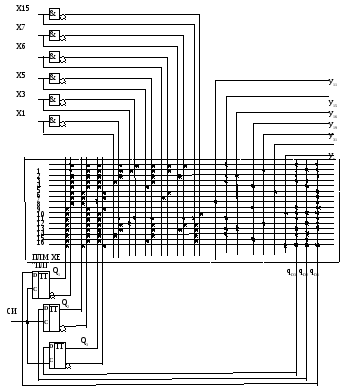
Рис. 3.4‑76
участков, предпочтение следует отдавать автомату Мура, так как у него проще логика формирования выходных сигналов.