

14.2. Линейная модель цифрового фильтра. Нерекурсивные и рекурсивные фильтры
Понятие фильтр будем использовать в широком смысле как устройство для обработки сигнала заданным способом. Как отмечалось, частотные фильтры, пропускающие определенные полосы частотных составляющих, являются одной из разновидностей фильтров.
Поскольку цифровой фильтр обрабатывает сигналы на основе использования вычислительной техники, то сигнал, поступающий на вход вычислительного устройства, должен быть цифровым, т. е. дискретным и квантованным. Как правило, исходный, подлежащий обработке сигнал является аналоговым, поэтому на первом этапе цифровой обработки его преобразуют в цифровой дискретизацией и квантованием, что осуществляет устройство, называемое аналого-цифровымпреобразователем (АЦП).
Дискретизация представляет собой замену непрерывного во времени сигнала последовательностью отсчетов (выборок), взятых через определенные интервалы времени. Ранее отмечалось, что дискретизация должна осуществляться с частотой, достаточной для сохранения точности представления непрерывного сигнала. Квантование — это замена выборок напряжения дискретного сигнала, каждая из которых может принимать бесчисленное множество значений, выборками напряжения, принимающими одно из конечного числа значений.
К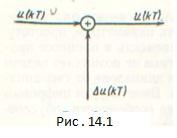 вантование
эквивалентно округлению числа при
вычислениях и должно осуществляться
с необходимой для решения задачи
точностью. В результате выполнения
операций дискретизации и квантования
сигнал на выходе АЦП есть последовательность
выборок сигнала, представленных в виде,
пригодном для обработки вычислительным
устройством.
вантование
эквивалентно округлению числа при
вычислениях и должно осуществляться
с необходимой для решения задачи
точностью. В результате выполнения
операций дискретизации и квантования
сигнал на выходе АЦП есть последовательность
выборок сигнала, представленных в виде,
пригодном для обработки вычислительным
устройством.
Квантование отсчета (выборки) можно рассматривать как появление в тракте обработки сигнала некоторой помехи, максимальное значение которой не превышает половины шага квантования. Последнее можно представить схемой (рис. 14.1), гдеuкв(kT)— квантованное значение выборки; ∆u(kT) — погрешность представления выборки сигнала и (kT), обусловленная квантованием. Если погрешность квантования пренебрежимо мала, то можно считать, что фильтр осуществляет преобразования точных значений выборок дискретизированного сигнала. Такой фильтр называют дискретным. Если требуется учет погрешности, вызванной квантованием выборок дискретизированного аналогового сигнала, то возникновение и преобразование этой погрешности цифровым фильтром следует рассматривать совместно с преобразованием квантованных отсчетов, пользуясь при этом представлением выборок сигнала, показанным на рис. 14.1.
Таким образом, в обоих случаях можно рассматривать прохождение через фильтр последовательности отсчетов дискретного сигнала. При этом, как отмечалось в главе 1, для цепей, находящихся под воздействием дискретных сигналов, можно использовать те же характеристики, что и для аналоговых цепей. Реакцию цепи на единичный импульс называют импульснойхарактеристикой цепи. Для аналоговых цепей она представляет собой непрерывную функцию G (t). Если единичный импульс
![]()
подать на вход цифрового фильтра, то сигнал на его выходе будет представлять собой дискретную последовательность значений, следующих с интерваломТ, называемым интерваломдискретизации. Этот сигнал является импульснойхарактеристикойцифровогофильтра.
При воздействии на цепь с импульсной характеристикой G (kT) сигналом, представляющим собой последовательность значений х (kT), выходной сигнал по аналогии с интегралом свертки (1.14) определяется дискретной сверткой:
![]()
Формула (14.1) определяет значение k-йвыходной выборки. Для нахождения выходного сигнала ее следует применить многократно для последовательного вычисления у(0); у (Т)\ у (2Т) и т.д.
Реакция фильтра на единичный импульс:
![]()
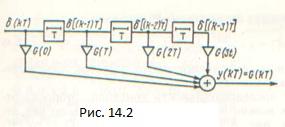
Если реакция фильтра на единичный импульс представлена конечным числом отсчетов, то G (kT) состоит из конечного числа членовK. В этом случае и реакция фильтра у (kT) на сигнал, представляемый конечным числом отсчетов х (kT), имеет конечное число отсчетов. Так, например, приК= 3 импульсная характеристика фильтра определяется четырьмя значениями:
![]()
Последнему выражению соответствует схема (рис. 14.2), которая входную последовательность отсчетов х (kT) преобразует в выходную у (kT) и представляет собой дискретный фильтр с импульсной характеристикой G (kT).Эта схема является также моделью цифрового фильтра, в которой не учитываются погрешности квантования.Такую модель называют линейной.На схему, приведенную на рис. 14.2, можно смотреть и как на форму представления алгоритма преобразования х (kT) ву (kT) в соответствии с выражением (14.1). Рассмотренный фильтр не имеет цепей обратной связи и называется нерекурсивным.
Для практической реализации нерекурсивного фильтра импульсная характеристика G (kT) должна представлять собой последовательность с конечным числом членов.
Если импульсная характеристика содержит бесконечное число отсчетов, быстро убывающих по значению, то можно, отбросив отсчеты с малыми значениями, ограничиться конечным их числом. Если же отсчеты импульсной характеристики не убывают по значению, то нерекурсивный фильтр реализовать невозможно.
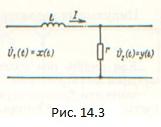
Пусть, например, необходимо создать цифровой фильтр, эквивалентный цепи (рис. 14.3), которую в этом случае называют фильтром-прототипом. Такая цепь была рассмотрена в § 1.1, а ее импульсная характеристика (см. § 1.5) имеет вид:
![]()
Импульсная характеристика дискретного фильтра:
![]()
Как видно, она содержит бесконечное число отсчетов. Соответствующий фильтр можно построить двумя способами:
заменить бесконечную последовательность конечной, отбросив отсчеты, значением которых можно пренебречь, и построить по ней нерекурсивный фильтр (см. рис. 14.2), где G(0) = α; G(T) =αe-αt;G(2T) =αe-2αt; G(3T) =αe-3αtи т. д.;
охарактеризовать цепь дифференциальным уравнением, которое (см. § 1.2) имеет вид:
![]()
и перейти от него к разностному.
В
§ 1.1, переходя к разностному уравнению,
мы заменяли ![]() на
на![]() ,
а в теории цифровой фильтрации
,
а в теории цифровой фильтрации ![]() заменяютна
заменяютна![]()
При этом дифференциальное уравнение (14.5) переходит в разностное:
![]()
![]()
Имея
в виду, что αТ-малая
величина, 1+αТ-
можно рассматривать как приближенное
представление ![]() и положить
и положить ![]() .
.
Коэффициент x(kT) при b=αТобеспечивает физическую эквивалентность при замене непрерывного воздействия х (t) последовательностью импульсов с амплитудами х (kT). Таким должен быть коэффициент bпри дискретной фильтрации. При цифровой обработке сигналов физическое значение импульсов несущественно, множитель T в выражении коэффициента bявляется масштабным и может быть принят равным единице и тогда b = α.
Уравнение (в.6) можно переписать в виде
![]()
Выражению (14.7) соответствует схема (рис. 14.4). При подаче на ее вход сигнала
![]()
на выходе последовательно будут получаться:
![]()
Р ассматриваемый
фильтр имеет требуемую импульсную
характеристику. У него есть цепь
обратной связи и он представляет собой
так называемыйрекурсивный
фильтр.
Этот фильтр эквивалентен нерекурсивному
фильтру
ассматриваемый
фильтр имеет требуемую импульсную
характеристику. У него есть цепь
обратной связи и он представляет собой
так называемыйрекурсивный
фильтр.
Этот фильтр эквивалентен нерекурсивному
фильтру
(см. рис. 14.2). Однако, как видно из рис. 14.4, схема и соответственно алгоритм рекурсивного фильтра проще, чем нерекурсивного. Так, для определения одного значения выходного сигнала для нерекурсивного фильтра требуется выполнить 2/С операций, а для рекурсивного — только две операции. Поэтому если импульсная характеристика цифрового (дискретного) фильтра должна иметь большое число отсчетов, то целесообразно использовать рекурсивные схемы. Нерекурсивную схему следует применять при реализации фильтров с импульсной характеристикой, содержащей небольшое число отсчетов. В технической литературе, посвященной цифровым и дискретным фильтрам, использована и другая терминология: фильтры с конечной импульсной характеристикой (КИХ-фильтры) и с бесконечной импульсной характеристикой (БИХ-фильтры). Любой реальный нерекурсивный фильтр является и КИХ-фильтром. Рекурсивные фильтры, как правило, есть БИХ-фильтры, однако возможно построение рекурсивных фильтров, представляющих собой КИХ-фильтры.