

учебник Кузнецова 2003
.pdfВ.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
крена приводит к скольжению на левое полукрыло, в результате чего
появляется положительный момент крена Mβx ∆β и самолет начинает
крениться в обратную сторону появляется «голландский шаг».
Таким образом, боковое движение самолета состоит из двух апериодических и одного колебательного движения, причем одно апериодическое и колебательное движение является быстрым, а второе апериодическое - медленным. При исследовании динамики бокового движения медленным спиральным движением часто пренебрегают. Если
|
γa , |
|
ωy , |
|
ωy |
малы, то a |
= 0, a |
|
= 0, a |
= 0 . |
F |
M |
M |
β,γ |
|||||||
zк |
|
x |
|
y |
|
ωx ,ωy |
|
ωy ,ωx |
||
Тогда собственное быстрое боковое движение самолета описывается уравнением
xбб(t) = Aббxбб(t) . (4.11)
Вектор параметров состояния быстрого бокового движения
|
[x |
бб |
(t)]T |
=[∆ω (t) |
∆ω |
y |
(t) |
∆β(t) |
∆γ(t) ] . (4.12) |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Матрица состояния быстрого бокового движения |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
aω ,ω |
|
|
0 |
|
aω |
,β |
0 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
x |
x |
|
aωy ,ωy |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Aбб |
|
|
0 |
|
|
|
|
aωy ,β |
0 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
= |
0 |
|
|
aβ,ωy |
|
|
aβ,β |
. (4.13) |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aγ,ω |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Общее решение уравнения (4.11) имеет вид: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
∆ω |
x |
(t) = A' |
e−λ1t |
+ A'' |
e−λ2t |
+ A''' |
e−hбt sin( |
|
ω2 |
− h2 |
t +ϕ' |
) , |
||||||||||||||
|
|
|
|
ωx |
|
|
|
ωx |
|
|
|
ωx |
|
|
|
б |
|
|
б |
|
|
ωx |
|
|
||
|
∆ωy (t) = Aω' |
y e−λ1t + Aω'' |
y e−λ2t |
, |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
+A''' |
e−hбt sin( |
|
ω2 |
− h2 |
t +ϕ' |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
ωy |
|
|
|
б |
|
б |
|
|
ωy |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
∆β(t) = Aβ' e−λ1t |
+ Aβ'' e−λ2t |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
+A''' e−hбt |
|
|
ω2 − h2 |
t +ϕ' |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
sin( |
) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
β |
|
|
|
|
б |
б |
|
|
β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆γ(t) = A'γe−λ1t |
+ A''γe−λ2t |
. (4.14) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
+A'''e−hбt |
|
|
ω2 − h2 |
t +ϕ' |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
sin( |
) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
γ |
|
|
|
|
|
б |
б |
|
|
γ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Здесь постоянные |
A' |
, A'' |
, A''' |
,ϕ' |
, A' |
|
,A'' |
|
,A''' |
|
,ϕ' |
|
, |
||||||||||||
|
|
|
|
|
|
|
|
|
ω |
x |
ω |
|
ω |
ω |
ω |
y |
ω |
y |
|
ω |
y |
ω |
y |
|||
|
|
|
|
|
|
|
|
|
|
|
x |
x |
x |
|
|
|
|
|
|
|||||||
Aβ' , Aβ'' , Aβ''' , ϕβ' , A'γ , A''γ , A'''γ , ϕ'γ определяются из начальных
условий.
Траекторное боковое движение. Для получения модели бокового траекторного движения самолета примем следующее допущение. Пусть развороты самолета совершаются координировано без скольжения.
Тогда при ∆β = 0 и ∆β = 0 из третьего и пятого уравнений системы уравнений (2.111) получим ∆ψ = −aβ,γ∆γ . Вектор параметров траек-
торного бокового движения xбт (t) сформируем из первичного параметра - приращения угла рыскания ∆ψ и вектора вторичных параметров xб2 (t) :
[xбт(t)]T =[∆ψ(t) ∆Ψ(t) ∆z(t)] . (4.15)
∆ψ(t), ∆Ψ(t), ∆z(t) зависят теперь
только от параметров быстрого бокового движения, поэтому траекторное боковое движение самолета можно описать уравнением
xбт (t) = Aбтxбт (t) +Bбту uбту (t) , (4.16)
где uбту (t) - вектор входа по управляющим воздействиям в виде
изменения параметров быстрого бокового движения
( uбту (t) = xбб(t) ).
Матрица состояния бокового траекторного движения
|
0 |
0 |
|
|
|
0 |
|
||
Aбт = |
0 |
0 |
0 |
. (4.17) |
|
|
0 |
|
|
az,Ψ |
0 |
|
||
Матрица входа параметров состояния бокового траекторного движения по управляющим воздействиям параметров быстрого бокового движения
|
0 |
0 |
|
0 |
−aβ,γ |
|
||
Bу |
= 0 |
0 |
a |
Ψ,β |
a |
|
|
. (4.18) |
бб |
|
|
|
|
Ψ,γ |
|
||
|
|
0 |
|
0 |
|
0 |
|
|
|
0 |
|
|
|
|
|||
Уравнение (4.16) описывает собственное боковое траекторное движение самолета, возникновение которого обусловлено начальными
возмущениями ∆ψ0 , ∆Ψ0 , ∆z0 , а также вынужденное траекторное
движение самолета, вызванное изменением параметров быстрого бокового движения.
4.2. УСТОЙЧИВОСТЬ БОКОВОГО ДВИЖЕНИЯ
4.2.1. Характеристики устойчивости бокового движения
Статическая устойчивость бокового движения. Боковая статиче-
ская устойчивость самолета определяет равновесие моментов рыскания и крена. Поэтому принято рассматривать два вида боковой статической устойчивости: путевую (флюгерную) относительно оси OY и попереч-
ную относительно оси ОХ. Под путевой статической устойчивостью
самолета понимают его способность самостоятельно без участия пилота в управлении противодействовать изменению угла скольжения.
Пусть самолет находится в прямолинейном установившемся полете. Если в результате воздействия внешнего возмущения и изменения
угла скольжения на величину ∆β появится аэродинамический момент
Myβ , направленный на сохранение исходного угла скольжения, то
самолет обладает путевой статической устойчивостью. Запас путевой статической устойчивости самолета удобно определяется через поло-
жения координат центра масс самолета xT и фокуса xFβ по углу скольжения относительно размаха крыла.
Фокусом по углу скольжения называется точка Fβ , расположенная
в плоскости симметрии самолета, относительно которой моменты рыскания и крена остаются постоянными при малых изменениях угла
скольжения (рис. 4.1). Положение фокуса xFβ и центра масс самолета
xT выражается в долях размаха крыла 1:
xFβ = xFlβ 100% , xT = xlT 100% . (4.19)
При изменении угла скольжения на угол ∆β в фокусе по углу скольжения Fβ возникает приращение поперечной силы ∆Z , которое на плече ( xFβ - xT ) создает момент ∆Myβ . Если центр масс самолета расположен впереди фокуса ( xFβ > xT ), то момент ∆Myβ <0 будет
стремиться развернуть самолет на устранение появившегося приращения угла скольжения ∆β, т. е. самолет будет обладать путевой статической устойчивостью.
____________________________________________________________________________________________________________________________
51 май 2003г.
ДИНАМИКА БОКОВОГО ДВИЖЕНИЯ САМОЛЕТА
Если центр масс самолета находится позади фокуса ( xFβ < xT ), то при увеличении угла скольжения ( ∆β > 0) на самолет будет действо-
вать момент ∆Myβ > 0, при уменьшении угла скольжения ( ∆β < 0)-
момент ∆Myβ < 0. В обоих случаях самолет стремится еще больше
отклониться от исходного состояния равновесия по углу скольжения и не обладает путевой статической устойчивостью.
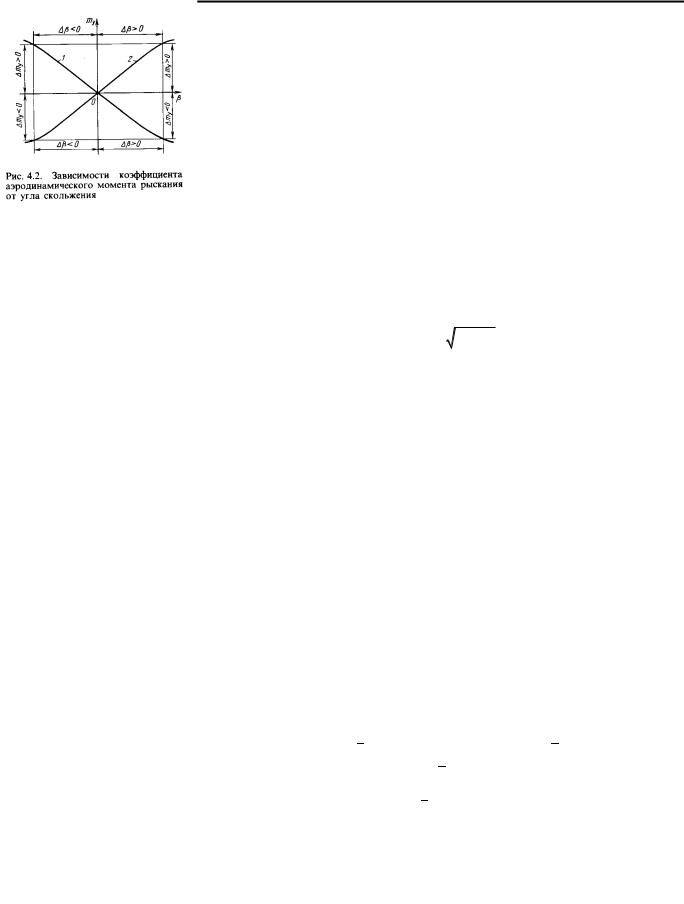
Основной характеристикой путевой статической устойчивости яв-
ляется степень путевой статической устойчивости по углу скольже-
ния mβy - частная производная коэффициента момента рыскания по
углу скольжения.
Самолет обладает путевой статической устойчивостью, если
( xFβ > xT ) или mβy < 0 (рис. 4.2). Следует помнить, что самолет, об-
ладающий путевой статической устойчивостью, не стремится выдержать исходное направление полета, а лишь противодействует изменению угла скольжения и подобно флюгеру поворачивается по углу рыскания, самопроизвольно устраняя появившийся угол скольжения. При
∆β≠0 боковая аэродинамическая сила Zа искривляет траекторию,
поворачивая вектор скорости центра масс относительно первоначального положения. Для возвращения самолета к исходному направлению полета требуется вмешательство пилота или автоматики.
Под поперечной статической устойчивостью самолета понимают его способность при возникновении скольжения крениться в сторону отстающего полукрыла.
Пусть самолет находится в прямолинейном установившемся полете, и в результате случайного возмущения появилось приращение угла
крена ∆γ . Симметричность обтекания самолета воздушным потоком нарушится и самолет будет скользить на опущенное полукрыло с углом ∆β. Если при скольжении на правое полукрыло ( ∆β > 0) возникает момент крена, стремящийся повернуть самолет в сторону левого полукрыла ( ∆Mxβ < 0 ) и устранить образовавшееся приращение угла
скольжения ∆β, то самолет обладает поперечной статической устойчивостью.
Если при скольжении на правое полукрыло ( ∆β < 0) возникает момент крена, стремящийся и далее повернуть самолет в сторону правого полукрыла ( ∆Mxβ > 0 ) и увеличить приращение угла скольже-
ния ∆β, то самолет не обладает поперечной статической устойчиво-
стью. Степень поперечной статической устойчивости по углу сколь-
тической устойчивости по скорости крена mωx x - частная производ-
ная коэффициента момента крена по скорости крена. Самолет обладает путевой и поперечной статической устойчивостью, если mωy y < 0 и
mωx x < 0.
Динамическая устойчивость бокового движения. Наличие путе-
вой и поперечной статической устойчивости еще не гарантирует возвращения самолета к исходному режиму полета. Теоретические и экспериментальные исследования бокового короткопериодического движения самолета по углу скольжения показывают, что оно с достаточной точностью может быть описано затухающей синусоидой
∆β(t) = Aβбe−hбt sin(νбt +ϕβб) , (4.20)
где hб - коэффициент демпфирования боковых короткопериоди-
ческих колебаний; νб -круговая частота боковых короткопериодиче-
ских колебаний; ϕβб -фазовый угол сдвига; Aβб - постоянная, опреде-
ляемая из начального условия ∆β = β0 при t = 0.
Коэффициент демпфирования hб и круговая частота колебаний
νб , а также частота недемпфированных колебаний ωб , определяемая
выражением ωб = hб2 +νб2 , являются характеристиками демпфи-
рования самолета в боковом короткопериодическом движении. Выражение (4.20) описывает колебательный затухающий процесс,
аналогичный представленному на рис.3.3 процессу изменения угла атаки. С помощью (4.20) определяют основные характеристики динамической устойчивости самолета в боковом движении, по которым оценивают качество переходного процесса: период собственных боко-
вых короткопериодических колебаний Tб , время затухания tбзат „ число короткопериодических колебаний до практически полного затухания nбзат :
T |
= |
3π |
, |
tб |
= |
3 |
, nб |
= |
tбзат |
. (4.21) |
||
ν |
|
h |
|
T |
||||||||
б |
|
б |
|
зат |
|
б |
зат |
|
|
|||
|
|
|
|
|
|
|
|
|
б |
|
||
Характеристики боковой устойчивости, за исключением времени затухания колебаний tбзат (не более 12 с для взлетно-посадочных ре-
жимов и не более 20 с для крейсерского режима), пока не нормируются, а получают только качественную оценку.
жения mβx - частная производная коэффициента момента крена по
углу скольжения, является основной характеристикой поперечной статической устойчивости. Самолет обладает поперечной статической
устойчивостью, если mβx < 0. Изменение коэффициента mx от угла скольжения β аналогично изменению коэффициента my , показанно-
го на рис.4.2.
Наряду с устойчивостью по углу скольжения рассматривают также устойчивость по угловым скоростям самолет с учетом фокуса по углу рыскания и крена. Степень путевой скольжения статической устой-
чивости по скорости рыскания mωy y - частная производная коэффици-
ента момента крена по скорости рыскания. Степень поперечной ста-
4.2.2. Условия устойчивости собственного бокового движения
Устойчивость быстрого кренового движения. Условием устой-
чивости быстрого кренового движения является отрицательность большого вещественного корня λ1 < 0 характеристического уравнения
(4.8). Приближенное значение большого корня λ1 можно получить, отбрасывая в уравнении слагаемые со степенями ниже третьей. Тогда
λ |
−A |
б |
|
|
ω |
|
|
ωy |
|
|
β |
|
|
|
|
|
|||||||||
3 |
= M |
x + M |
y |
+ F . (4.22) |
||||||||
1 |
|
|
|
x |
|
|
|
|
zк |
|||
Практика расчетов показывает, что наибольшим здесь является Mωx x , поэтому обычно принимают λ1 Mωx x . Так как на докритиче-
ских углах атаки Mωx x < 0 , то и λ1 < 0 . Поэтому быстрое креновое движение быстро затухает, демпфируется. На закритических углах атаки, когда Mωx x ≥ 0 , наоборот, вместо демпфирующего момента
возникает момент самовращения. Большой действительный корень λ1
становится при этом положительным, а самолет - апериодически неустойчивым.
Устойчивость медленного спирального движения. Условием ус-
тойчивости спирального бокового движения является отрицательное значение малого действительного корня λ2 < 0 характеристического
уравнения. Приближенное значение малого корня λ2 можно получить, отбрасывая в уравнении три первых слагаемых. Тогда
52 |
май 2003г. |

В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
λ |
|
− A0б |
= |
|
|
|
|
|
|
|
γa |
|
|
ωy |
|
|
β |
|
|
|
|
β ωy |
) |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
2 |
|
|
|
|
|
Fzк |
(Mx |
Fzk |
− Mx My |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1б |
|
Fβ (Mωx Mωy + Mωx − Mωy Mωy ) − Mβ |
(Mωx + Fγa ) |
||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
zк y x |
x |
|
|
|
x |
|
|
|
y |
|
x |
y zк |
||||||||||||||
. (4.23)
Практика расчетов показывает, что корень λ2 может иметь как отрицательный, так и положительный знак. Отрицательному значению корня λ2 < 0 соответствует медленно затухающее движение по крену и
рысканию. Если этот корень положителен λ2 > 0 , то движение явля-
ется апериодически неустойчивым и характеризуется медленным нарастанием крена, разворотом и снижением.
Устойчивость быстрого колебательного движения. Для анализа устойчивости быстрого колебательного движения рассмотрим его составляющие по рысканию и скольжению с помощью следующего уравнения
xбб(t) = Aббxбб(t) , (4.24)
где
∆ωy (t) |
aωy ,ωy |
aωy ,β |
|
||||
xбб(t) = |
∆β |
, Aбб = a |
β,ωy |
a |
|
. (4.25) |
|
|
|
(t) |
|
|
β,β |
|
|
Характеристический определитель уравнения (4.24) имеет вид
p −aω |
,ω |
|
−aω |
,β |
|
p +ω2 |
, (4.26) |
|
∆(p) = |
y |
|
y |
y |
= p2 + 2h |
σ |
||
|
−aβ,ω |
|
|
p −aβ,β |
б |
|
||
y |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
где hб - коэффициент демпфирования боковых короткопериодических колебаний
|
1 |
|
|
1 |
|
|
ωy |
|
|
β |
|
|
|
|
|
|
|
|
|||||
hб = − |
2 |
(aωy ,ωy |
+ aβ,β ) = − |
2 |
(My |
+ Fzк |
) , (4.27) |
||||
|
|
|
|
|
|
|
|
|
|
||
ωб - частота недемпфированных боковых короткопериодических колебаний
2 |
|
|
|
|
|
|
|
|
ωy |
|
β |
|
|
|
β |
|
a |
|
−a |
a |
|
= M |
|
−M |
. (4.28) |
||||||||
ω = a |
β,β |
ωy ,β |
y |
F |
y |
|||||||||||
б |
ωy ,ωy |
|
β,ωy |
|
|
|
zк |
|
|
|
|
|||||
Корни характеристического уравнения
λ2 + 2hбλ+ωб2 = 0 (4.29)
определяют характер собственного бокового короткопериодического возмущенного движения самолета
λ |
3,4 |
= −h |
б |
± |
h2 |
−ω2 |
. (4.30) |
|
|
|
б |
б |
|
Как правило, ωб2 > hб2 и ωб2 >0 и корни уравнения (4.29) являются
комплексными сопряженными, а собственное короткопериодическое движение - колебательным
λ |
3,4 |
= −h |
б |
±i ω2 |
− h2 |
. (4.31) |
|
|
б |
б |
|
Тогда решение уравнения (4.24) может быть получено в аналитическом виде
∆ωy (t) = Aωбy e−hбt sin(νбt +ϕбωy ), (4.32) ∆β(t) = Aβбe−hбt sin(νбt +ϕβб),
где Aωбy , Aβб - постоянные, определяемые из начальных условий ∆ωy = ∆ω0y и ∆β = ∆β0 при t = 0 νб круговая частота собственных боковых короткопериодических колебаний
νб = ωб2 −hб2 , (4.33)
ϕωбy , ϕβб - фазовые углы сдвига боковых короткопериодических
колебаний.
Необходимыми и достаточными условиями устойчивости опорного собственного бокового короткопериодического движения по критерию Гурвица являются следующие неравенства
hб > 0 , ωб2 > 0 . (4.34)
Если самолет обладает путевой статической устойчивостью, то условие (4.34) выполняется. Однако этот вывод справедлив только для малых углов атаки. При значительных углах атаки существенное влия-
ние на движение рыскания оказывает движение крена. Тогда наличие путевой устойчивости еще не гарантирует устойчивости движения рыскания и, наоборот, при отсутствии путевой устойчивости движение рыскания может быть устойчиво благодаря влиянию движения крена.
Обычно же hб > 0 и ωб2 > 0 , и отклонения параметров ∆ωy и
∆β в процессе собственного бокового короткопериодического движения будут затухать, стремясь к нулю. Тогда это движение является асимптотически устойчивым. Если hб < 0 и ω2y < 0 , корни λ3,4
становятся действительными сопряженными, а движение по рысканию - апериодически неустойчивым.
Устойчивость собственного бокового движения самолета по первичным параметрам. Для анализа устойчивости воспользуемся критерием Рауса-Гурвица. Условиями устойчивости являются
Aб0 > 0, A1б > 0, Aб2 > 0,A3б > 0,
R = A1бAб2A3б −(A3б)2 Aб0 −(A1б)2 > 0. (4.35)
Положительность коэффициентов характеристического уравнения A1б , Aб2 , A3б соблюдается всегда при полете самолета на дозвуковых скоростях и докритических углах атаки, так как все вращательные производные, кроме Mωy x , имеют отрицательный знак у статически ус-
тойчивого самолета. Таким образом, устойчивость самолета в боковом движении по первичным параметрам будет определяться по существу двумя условиями
Aб0 > 0, R > 0, (4.36)
так как коэффициент Aб0 может в принципе иметь любой знак.
Дальнейший анализ устойчивости удобно провести с помощью полученных условий устойчивости по видам бокового движения. Представим характеристическое уравнение (4.9) в следующем виде
(p −λ1)(p −λ2 )(p2 + 2hбp +ωσ2 ) = 0. (4.37)
Из (4.8) и (4.36) следует, что
2hб −(λ1 +λ2 ) = A3б,
ωб2λ1λ2 = Aб0 . (4.38)
Рассмотрим уравнение (4.37). Из него следует, что условие Aб0 > 0, выполняется в том случае, если λ1 < 0 (устойчиво быстрое апериодическое движение), λ2 < 0 (устойчиво медленное спиральное
движение), ωб2 > 0 (устойчиво короткопериодическое движение). Вторым условием устойчивости короткопериодического движения
является hб > 0 , а полное боковое движение по первичным парамет-
рам может быть устойчиво лишь при R > 0 . На границе колебательной устойчивости, когда комплексно-сопряженные корни характери-
стического уравнения λ3 и λ4 становятся чисто мнимыми, выполня-
ется условие R = 0 .
Весьма важным является вопрос о влиянии статической поперечной и путевой устойчивости на динамическую боковую устойчивость самолета. Как показывают исследования, при увеличении путевой статической устойчивости самолет приближается к границе спиральной устойчивости и может стать спирально неустойчивым. Причем степень путевой статической устойчивости, при которой произойдет потеря спиральной устойчивости тем больше, чем больше поперечная статическая устойчивость самолета.
Если увеличивается поперечная статическая устойчивость, самолет удаляется от границы спиральной устойчивости, но при этом ухудшается затухание его колебательного движения. При этом возможна потеря колебательной устойчивости. Такой характер влияния статической устойчивости на динамическую устойчивость объясняется следующим образом. Пусть самолет получил начальное возмущение - положительный угол крена и накренился на правое полукрыло. Следствием этого будет возникновение положительного угла скольжения и пропорцио-
нальных ему моментов Mxβ и Myβ . Если самолет обладает статиче-
ской устойчивостью в боковом движении, эти моменты будут отрицательными. Самолет начнет поворачиваться относительно продольной
оси OX , уменьшая крен, и относительно нормальной оси OY, уменьшая угол скольжения. Если велика путевая статическая устойчивость,
____________________________________________________________________________________________________________________________
53 май 2003г.
ДИНАМИКА БОКОВОГО ДВИЖЕНИЯ САМОЛЕТА
самолет будет двигаться без скольжения, |
момент крена Mxβ будет |
|
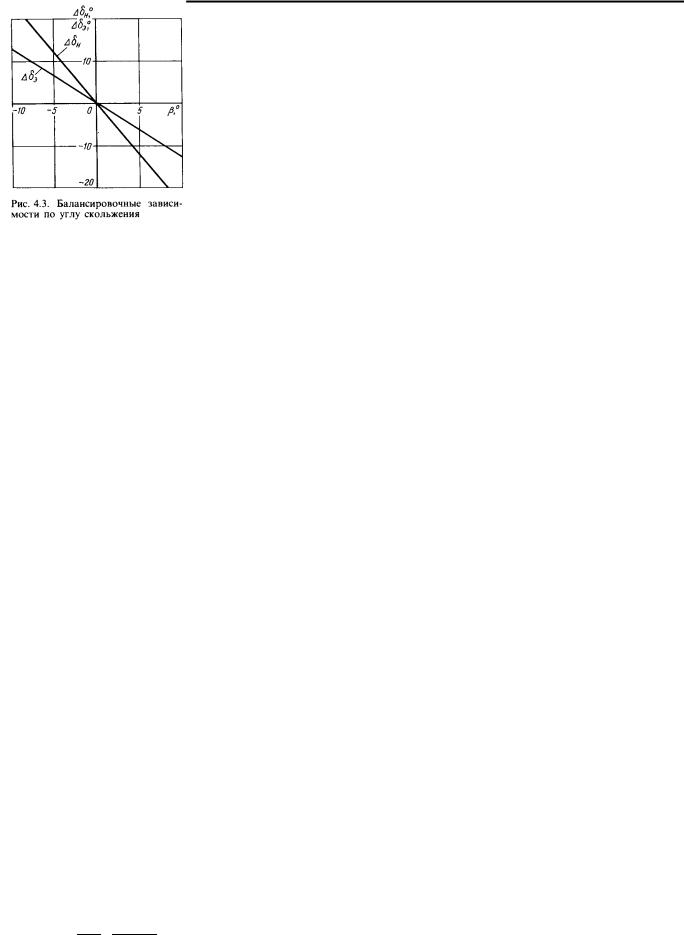
Балансировочные зависимости ∆δн(β) |
и ∆δэ(β) |
(рис. 4.3) по- |
||||||||||||||||||||||||||||||||||||
равен нулю, начальный угол крена сохранится и вызовет движение |
казывают, на сколько градусов необходимо отклонить руль направле- |
||||||||||||||||||||||||||||||||||||||||
самолета по спирали. |
|
|
|
|
|
|
|
|
|
|
ния и элероны для балансировки самолета в прямолинейном полете с |
||||||||||||||||||||||||||||||
Если наоборот, путевая устойчивость мала по сравнению с попе- |
заданным углом скольжения. Однако для обеспечения прямолинейного |
||||||||||||||||||||||||||||||||||||||||
речной устойчивостью, то угол скольжения будет уменьшаться медлен- |
полета необходимо еще выполнить условие равновесия поперечных |
||||||||||||||||||||||||||||||||||||||||
но, а угол крена - быстро. В момент, когда крен становится нулевым, |
сил: |
Z + G sin γ = 0 . (4.43) |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
положительное скольжение еще останется, следовательно, самолет |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
будет продолжать вращаться относительно продольной оси, увеличивая |
|
Подставим в выражение (4.42) значение поперечной силы из (1.12) |
|||||||||||||||||||||||||||||||||||||||
крен на левое полукрыло. Отрицательный угол крена приведет к |
|
||||||||||||||||||||||||||||||||||||||||
и получим соотношение между углами крена и скольжения: |
|
||||||||||||||||||||||||||||||||||||||||
скольжению на левое полукрыло, появится положительный момент |
|
||||||||||||||||||||||||||||||||||||||||
крена Mxβ |
и самолет начнет крениться в обратную сторону и вызовет |
|
β = − |
|
2G sin |
|
γ |
. (4.44) |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
β |
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
движение самолета змейкой. |
|
|
|
|
|
|
|
|
|
|
czSρV |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Таким образом, требования к характеристикам путевой и попереч- |
|
Таким образом, для выполнения координированного скольжения |
|||||||||||||||||||||||||||||||||||||||
ной устойчивости с точки зрения обеспечения динамической спираль- |
при сохранении прямолинейного полета необходимо отклонением эле- |
||||||||||||||||||||||||||||||||||||||||
ной и колебательной устойчивости противоречивы. При увеличении |
ронов ввести самолет в крен, определяемый соотношением (4.43), в |
||||||||||||||||||||||||||||||||||||||||
спиральной устойчивости ухудшаются характеристики колебательного |
сторону скольжения. Тогда выполнятся все условия сбалансированно- |
||||||||||||||||||||||||||||||||||||||||
движения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сти бокового движения. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Обычно спиральное движение протекает очень медленно и слабо |
|
Потребные для балансировки самолета отклонения руля направле- |
|||||||||||||||||||||||||||||||||||||||
ощущается пилотом даже в случае некоторой спиральной неустойчиво- |
ния и элеронов усилия и перемещения педалей и штурвала количест- |
||||||||||||||||||||||||||||||||||||||||
сти. Напротив, колебания самолета по рысканию и крену с заметной |
венно характеризуют статическую боковую управляемость самолета. В |
||||||||||||||||||||||||||||||||||||||||
частотой значительно затрудняют пилотирование. Поэтому характери- |
качестве основных параметров используются градиенты усилий и пе- |
||||||||||||||||||||||||||||||||||||||||
стики короткопериодического колебательного движения считаются |
ремещения педалей и штурвала по скольжению Pβ , |
xβ |
, Pβ , |
xβ и |
|||||||||||||||||||||||||||||||||||||
более важными. |
|
|
|
|
|
|
|
|
|
|
|
|
|
крену Pγ , |
|
|
γ , P |
γ , x |
γ . |
|
|
|
|
|
|
н |
н |
э |
э |
||||||||||||
4.3. УПРАВЛЯЕМОСТЬ БОКОВОГО ДВИЖЕНИЯ |
|
x |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
н |
|
|
н |
э |
э |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
4.3.1. Характеристики управляемости бокового движения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Статическая управляемость и балансировка бокового движе- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
ния. Она характеризуется усилиями и перемещениями педалей и штур- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
вала для выполнения маневра в боковой плоскости, которые отсчиты- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
вают от определенных балансировочных усилий и перемещений, обес- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
печивающих равновесие всех боковых сил, действующих вдоль оси OZ, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
и моментов, действующих относительно осей ОХ и OY. Режимы полета |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
самолета, в которых выполняются условия |
|
∑Fz = 0 , ∑Mx = 0 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
∑My = 0 называют балансировочными режимами бокового дви- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
жения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рассмотрим условия балансировки бокового движения в прямоли- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
нейном полете самолета со скольжением, например, во время захода на |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
посадку с боковым ветром. Для создания скольжения необходимо от- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
клонить руль направления на угол |
∆δн таким образом, чтобы выпол- |
|
Градиенты перемещении |
педалей |
по углам скольжения и крена |
||||||||||||||||||||||||||||||||||||
нялось условие равновесия моментов относительно оси OY: |
|
||||||||||||||||||||||||||||||||||||||||
xβн , и xнγ показывают, |
на какую дополнительную величину нужно |
||||||||||||||||||||||||||||||||||||||||
My = Myβ + Myδн |
= 0 . (4.39) |
|
|
|
|||||||||||||||||||||||||||||||||||||
Тогда с учетом выражений (1.26) и (1.35) получим балансировочное |
переместить педали для изменения углов скольжения и крена на 1 °: |
||||||||||||||||||||||||||||||||||||||||
отклонение руля направления: |
|
|
|
β |
|
|
xβн |
= |
|
∆xн |
= |
|
|
|
δβн |
|
, |
xнγ = ∆xн |
= |
δнγ |
|
. (4.45) |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
β |
|
|
|
δ |
|
|
|
|
|
|
|
|
|
my |
|
|
|
|
|
∆β |
|
|
|
kш.н |
|
∆γ |
|
kш.н |
|
|
|
||||||||||
my∆β+ myн ∆δн |
= 0, ∆δн |
= − |
|
|
∆β . (4.40) |
|
Градиенты отклонения руля направления по углу скольжения и уг- |
||||||||||||||||||||||||||||||||||
mδн |
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
лу крена и коэффициент штурвала по рулю направления, показываю- |
|||||||||||||||||||||||
Однако отклонение руля направления приведет также и к появле- |
щий, на сколько градусов отклоняется руль направления при переме- |
||||||||||||||||||||||||||||||||||||||||
нию момента крена |
M |
|
, так как возникшая на руле направления |
щении педалей на 1 мм, имеют вид: |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
xδн |
|
|
|
|
|
|
|
δβн |
|
∆δн |
, δнγ = |
∆δн , kш.н = |
∆δн |
|
|
|
|
|
|||||||||||||
поперечная сила ∆Zн |
|
приложена выше центра масс самолета. У само- |
|
= |
. (4.46) |
|
|
|
|||||||||||||||||||||||||||||||||
лета, обладающего поперечной устойчивостью, возникнет стабилизи- |
|
|
|
|
∆β |
|
|
|
|
|
|
∆γ |
|
∆x |
н |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pβ и |
||||||||||||||||||||
рующий момент |
|
M |
xβ |
, направленный на устранение угла скольжения |
|
Градиенты усилий на педалях по углам скольжения и крена |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|||
кренением на отстающее полукрыло. Для прекращения вращения само- |
γ |
показывают, какое дополнительное усилие необходимо приложить |
|||||||||||||||||||||||||||||||||||||||
лета по крену необходимо сбалансировать самолет по моментам отно- |
Pн |
||||||||||||||||||||||||||||||||||||||||
к педалям, чтобы изменить угол скольжения или угол крена на 1 °: |
|
||||||||||||||||||||||||||||||||||||||||
сительно оси ОХ отклонением элеронов на угол ∆δэ : |
|
Pβ |
= ∆Pн |
= xβPxн |
, Pγ |
= ∆Pн |
= x |
γ Pxн . (4.47) |
|
|
|||||||||||||||||||||||||||||||
M |
|
= M |
|
|
+ M |
|
|
|
+ M |
|
|
= 0 . (4.41) |
|
|
|
||||||||||||||||||||||||||
x |
xβ |
xδн |
xδэ |
|
н |
|
|
∆β |
|
|
|
н н |
н |
∆γ |
|
|
н |
н |
|
|
|
||||||||||||||||||||
Тогда с учетом выражений (1.30), (1.46) и (4.41) получим баланси- |
|
где |
Pxн |
- |
градиент усилий на педалях, показывающий, как изме- |
||||||||||||||||||||||||||||||||||||
ровочное отклонение элеронов: |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
mδxн mβy |
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
β |
|
|
|
δ |
|
|
|
|
|
|
|
|
няются усилия при перемещении педалей на 1 мм. |
|
|
|
|||||||||||||||||||||||||
mx ∆β+ myэ ∆δэ |
− |
|
|
|
∆β = 0, |
|
|
|
Градиенты перемещения штурвала по углам скольжения и крена |
||||||||||||||||||||||||||||||||
mδyн |
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xβэ |
и |
xэγ |
|
показывают, |
на какую дополнительную величину нужно |
|||||||||||||||||||||
mβ
∆δэ = − [mδxэ
x
mδн mβ
− δx δy ]∆β. (4.42)
myн mxэ
переместить штурвал для изменения углов скольжения и крена на 1 °:
xβэ |
= |
∆xэ |
= |
δβэ |
, xэγ = |
∆xэ |
= |
δэγ |
. (4.48) |
|
kш.э |
kш.э |
|||||||||
|
|
∆β |
|
|
∆γ |
|
|
54 |
май 2003г. |
В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
Градиенты отклонения элеронов по углу скольжения и углу крена и |
тывания |
tб |
|
, время затухания tб |
|
и относительное превышение пере- |
||||||||||||||||||||||||||||
коэффициент штурвала по элеронам имеют вид: |
|
ср |
|
|
|
|
|
|
|
|
|
|
зат |
|
||||||||||||||||||||
β |
= |
∆δ |
э |
|
|
γ |
= |
∆δ |
э , |
kш.э = |
∆δ |
э . (4.49) |
грузки ∆n |
z |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
δэ |
|
, δэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
∆β |
|
|
|
|
|
∆γ |
|
|
|
∆xэ |
4.3.2. Моделирование управляющих воздействий в боковом |
||||||||||||||||||||
Градиенты усилий на штурвале по углам скольжения и крена Pэβ , |
||||||||||||||||||||||||||||||||||
движении |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Pγ показывают, какое дополнительное усилие необходимо приложить |
Передаточные функции самолета в быстром боковом вынуж- |
|||||||||||||||||||||||||||||||||
э |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
денном движении по управляющим воздействиям. Управление бы- |
|||||||||||||||||
к штурвалу, чтобы изменить угол скольжения или угол крена на 1°: |
||||||||||||||||||||||||||||||||||
стрым боковым движением самолета осуществляется путем отклонений |
||||||||||||||||||||||||||||||||||
|
|
= ∆Pэ |
|
|
|
|
|
|
|
|
= ∆Pэ = xγPxэ . (4.50) |
|||||||||||||||||||||||
Pβ |
= xβPxэ , Pγ |
элеронов ∆δэ , рулей направления ∆δн и органов управления боковой |
||||||||||||||||||||||||||||||||
э |
|
∆β |
|
|
э |
|
э |
|
э |
|
|
∆γ |
|
э э |
силой ∆δz . Рассмотрим |
модель |
быстрого бокового вынужденного |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
где Pxэ - градиент усилий на штурвале, показывающий, как изме- |
||||||||||||||||||||||||||||||||||
движения самолета при наличии управляющих воздействий: |
||||||||||||||||||||||||||||||||||
|
|
|
э |
|
|
|
|
|
|
|
|
|
|
|
|
|
xбб(t) = Aббxбб(t) + Bббу uббу (t) . (4.54) |
|||||||||||||||||
няются усилия при перемещении штурвала на 1 мм. |
||||||||||||||||||||||||||||||||||
У самолета, обладающего путевой и поперечной статической ус- |
Вектор-столбец входа по управляющим воздействиям в быстром |
|||||||||||||||||||||||||||||||||
тойчивостью все градиенты должны быть отрицательными. |
||||||||||||||||||||||||||||||||||
боковом движении |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
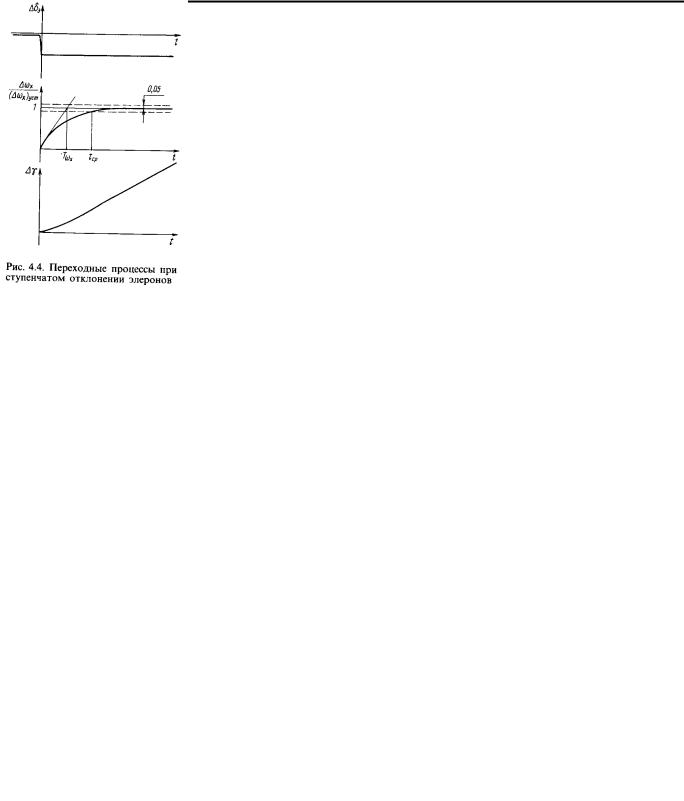
Динамическая управляемость бокового движения. Исследова- |
|
|
|
|
|
∆δн(t) |
∆δz (t)] . (4.55) |
|||||||||||||||||||||||||||
ние реакции самолета на ступенчатые отклонения элеронов и руля на- |
[uббу (t)]T = [∆δэ(t) |
|
||||||||||||||||||||||||||||||||
правления дает объективную оценку динамической управляемости |
Матрица входа по управляющим воздействиям в быстром боковом |
|||||||||||||||||||||||||||||||||
бокового движения. Теоретические и экспериментальные исследования |
движении |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
быстрого бокового движения самолета по крену показывают, что оно с |
|
|
|
a |
ωx ,δэ |
aωx ,δн |
0 |
|
||||||||||||||||||||||||||
достаточной точностью может быть описано экспоненциальной функ- |
|
|
|
|||||||||||||||||||||||||||||||
цией |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Bббу |
|
|
a |
ω |
|
,δ |
|
aω |
|
,δ |
|
0 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
= |
y |
э |
y |
н |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
. (4.56) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
Tωx ] (4.51) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
ω |
x |
(t) = (ω ) |
уст |
[1−e |
|
|
|
|
|
0 |
|
|
0 |
|
aβ,δz |
|||||||||||||||||||
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
0 |
|
|||||||||
где |
Tω |
|
- |
постоянная |
|
времени |
по угловой скорости крена; |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
Дополним уравнение состояния (4.54) уравнением выхода |
|||||||||||||||||
(ωx )уст |
- установившееся значение угловой скорости крена. |
|||||||||||||||||||||||||||||||||
yбб(t) = Cббxбб(t) , (4.57) |
|
|
||||||||||||||||||||||||||||||||
Выражение (4.51) описывает экспоненциальный процесс, представ- |
где yбб(t) - вектор-столбец выхода в быстром боковом движении; |
|||||||||||||||||||||||||||||||||
ленный на рис. 4.4. Основной характеристикой динамической боковой |
||||||||||||||||||||||||||||||||||
управляемости в быстром движении по крену является время переход- |
Cбб - матрица выхода в быстром боковом движении. |
|||||||||||||||||||||||||||||||||
ного процесса |
|
tп |
по истечении которого угловая скорость крена будет |
Пусть вектор выхода |
|
yбб(t) |
совпадает с вектором переменных |
|||||||||||||||||||||||||||
отличаться от установившегося значения на 5%: |
|
|||||||||||||||||||||||||||||||||
состояния xбб(t) . Тогда Cбб = I , где I - единичная матрица одина- |
||||||||||||||||||||||||||||||||||
tп = −ln 0,05Tωx |
. (4.52) |
|
|
|
||||||||||||||||||||||||||||||
|
|
|
ковой размерности с вектором xбб(t) . |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уравнение выхода (4.57) устанавливает однозначное соответствие |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
между переменными состояния и выходными переменными. Применим |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к уравнениям (4.54) и (4.57) преобразование Лапласа |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pXбб(p) = AббXбб(p) + Xбб(0) + Bббу Uббу (p) , |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Yбб(p) = Xбб(p) . (4.58) |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
откуда, исключая Xбб(p) , и полагая Xбб(0) , найдем |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
(p) = (pI − A |
бб |
)−1Bу |
Uу (p) . (4.59) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
бб |
|
|
|
|
|
|
|
|
|
|
|
бб |
|
бб |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wу |
(p) = |
Yбб(p) |
= (pI − A |
бб |
)−1Bу |
= Φ |
бб |
(p)Bу , (4.60) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
бб |
|
Uббу (p) |
|
|
бб |
|
бб |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где переходная матрица состояния быстрого бокового движения |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
самолета |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Φбб(p) = (pI − Aбб)−1 = (φбб(p))−1 . |
|
|
|||||||||
Быстрое колебательное движение по перегрузке при откло- |
Элементами матрицы Wу |
(p) являются передаточные функции |
||||||||||||||||||||||||
|
|
|
бб |
|
|
|
|
|
|
|
|
|||||||||||||||
нении элеронов или рулей направления может быть описано скачкооб- |
самолета по соответствующим параметрам вектора выхода Y (p) , |
|||||||||||||||||||||||||
разной затухающей синусоидой: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
бб |
|||||||
|
|
|
|
|
|
|
совпадающего в рассматриваемом случае с вектором переменных со- |
|||||||||||||||||||
|
|
|
|
|
|
|
ωб |
|
−hбt |
|
|
|
+ϕnz |
|
||||||||||||
∆ |
= |
( |
∆ |
nz )уст[1 |
− |
( |
)e |
sin( |
ν |
бt |
)] , (4.53) |
стояния быстрого бокового движения |
X |
бб |
(p) , на управляющие воз- |
|||||||||||
nz (t) |
|
|
|
νб |
|
|
б |
|
Uббу (p) |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
действия |
|
|
|
|
|
|
|
|
||||
где (∆nz )уст - установившееся значение перегрузки; ωб - частота |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
недемпфированных боковых короткопериодических колебаний; ϕбnz -
фазовый угол сдвига.
Выражение (4.53) описывает скачкообразный колебательный процесс, аналогичный представленному на рис. 3.4. Поэтому основными характеристиками динамической управляемости являются время сраба-
____________________________________________________________________________________________________________________________
55 май 2003г.

ДИНАМИКА БОКОВОГО ДВИЖЕНИЯ САМОЛЕТА
|
|
|
|
|
|
|
|
|
|
|
W |
∆δэ (p) |
|
|
W |
∆δн (p) |
|
W |
∆δz (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ωy aωx ,β / |
|
|
|
|
|
aωx ,β(p −aωy ,ωy ) / |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆ωx |
|
|
|
|
|
|
|
∆ωx |
|
|
|
|
∆ωx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(p −aω |
|
|
|
|
|
) |
|
|
|
|
(p −aω ,ω |
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
∆δэ |
|
|
|
|
|
|
|
|
∆δн |
|
|
|
|
|
∆δz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
,ω |
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
Wу (p) = |
W∆ωy (p) |
|
|
W∆ωy (p) |
|
W∆ωy (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
. (4.61) |
|
|
|
|
|
|
|
|
|
[p(p −aωy ,ωy ) |
|
[p(p −aωy ,ωy ) |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
бб |
|
|
|
|
W |
∆δ |
э |
(p) |
|
|
W |
∆δ |
н (p) |
|
W |
∆δ |
z |
(p) |
|
|
|
|
|
|
|
|
−a |
|
) |
|
|
|
|
|
|
|
|
|
0 |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/(p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
∆β |
|
|
|
|
|
|
|
|
|
∆β |
|
|
|
|
|
∆β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωx ,ωx |
|
(p −aβ,β) − |
|
|
|
|
|
(p −aβ,β ) − |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆δ |
|
|
(p) |
|
|
|
|
∆δ |
н (p) |
|
|
|
∆δ |
|
(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
W∆γ |
э |
|
|
W∆γ |
|
W∆γ z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ωy aωy ,β] |
|
|
|
|
|
aβ,ωy aωy ,β ] |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
Элементы матрицы |
|
Wу |
|
(p) |
|
|
определяются по отношению к «от- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пк |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
рицательным» отклонениям ∆δв , ∆δy , ∆δP , |
|
что обусловлено при- |
|
|
|
|
|
|
|
|
|
|
(p −aβ,β) / |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aωy ,β / |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
нятым направлением отсчета углов отклонения органов управления и |
|
|
|
|
|
|
|
|
|
|
[p(p −aωy ,ωy ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
возможностью показать в явном виде отрицательные обратные связи, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[p(p −aωy ,ωy ) |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
возникающие в процессе управления самолетом: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
(p −aβ,β) − |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
∆δэ |
|
|
|
|
|
|
∆ωx (p) |
|
|
|
∆δн |
|
|
|
|
|
|
∆ωx (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(p −aβ,β ) − |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
(p) |
= − |
|
|
|
|
(p) = − |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
a |
|
|
|
|
|
|
|
] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
W∆ωx |
|
∆δэ(p) |
|
, W∆ωx |
|
∆δн(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωy ,β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β,ωy |
|
|
|
|
|
|
|
|
aβ,ωy aωy ,β ] |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
∆ω (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
∆ωy (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
∆δ |
|
|
|
|
|
|
|
|
|
|
∆δ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
W |
|
z |
(p) |
= − |
|
|
|
|
x |
|
|
|
|
, W |
|
|
|
э |
(p) = − |
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ωy / |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(p −aωy ,ωy ) / |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
∆ωx |
|
|
|
|
|
|
∆δz (p) |
|
|
∆ωy |
|
|
|
|
|
|
|
∆δэ(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
∆ωy (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆ωy (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[p(p −aωy ,ωy ) |
|
|
|
|
[p(p −aωy ,ωy ) |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
W |
∆δн (p) = − |
, W |
∆δz (p) = − |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
∆ωy |
|
|
|
|
|
|
∆δн(p) |
|
|
|
∆ωy |
|
|
|
|
|
|
|
∆δz (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
(p −aβ,β) − |
|
|
|
|
|
|
|
(p −aβ,β ) − |
|
|
|
|
|
|
|
0 |
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
∆β(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆β(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
W |
∆δэ |
(p) = − |
|
, W∆δн |
(p) = − |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ω |
|
a |
ω |
|
|
,β] |
|
|
|
|
|
|
|
aβ,ω |
|
|
aω |
|
|
,β ] |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
y |
y |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
∆β |
|
|
|
|
|
|
∆δэ(p) |
|
|
|
∆β |
|
|
|
|
|
|
|
∆δн(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
∆δ |
|
|
|
|
|
= − |
|
∆β(p) |
|
|
|
∆δ |
(p) = − |
|
∆γ(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
W∆βz |
(p) |
|
|
|
|
|
|
|
|
|
, W∆γ |
э |
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aω ,βaγ,ω |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
∆δz (p) |
|
∆δэ(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ωy aωx ,βaγ,ωx / |
|
|
|
(p −aωy ,ωy ) / |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
W∆γ∆δн (p) = − |
|
∆γ(p) |
|
, W∆γ∆δz (p) = − |
|
∆γ(p) |
|
|
. |
(4.62) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[p(p −aωy ,ωy ) |
|
|
|
|
|
|
p(p −aωx ,ωx ) |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
∆δн(p) |
|
∆δz (p) |
|
|
|
aγ,ωx / p |
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
,ω ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
Переходная матрица состояния быстрого бокового движения |
|
|
(p −aω |
|
(p −a |
β,β |
) − |
|
|
|
|
|
|
|
|
[(p −aω |
|
|
,ω |
|
) |
|
|
|
|
|
1/ p |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
Φбб(p) = |
|
|
пр |
|
|
|
|
|
φбб(p) |
|
, (4.63) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
y |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
φбб(p) / |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ω |
aω |
|
,β ] |
|
|
|
|
|
|
|
|
(p −aβ β ) − |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
Определитель матрицы Φбб(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ω |
|
aω |
|
|
,β ] |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
(p −aωx ,ωx ) |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
−aωx ,β |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а передаточная матрица самолета в быстром боковом движении |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
(p |
|
−aω |
|
|
,ω ) |
|
−aω |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
y |
,β |
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
∆(p) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
Wбб(p) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
−aβ,ω |
|
|
|
|
(p −aβ,β) |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
{aωx ,δэ [(p −aωy ,ωy ) |
|
|
|
|
{aω |
|
,δ |
[(p −aω |
,ω |
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
н |
|
|
|
|
y |
|
y |
|
|
|
|
aβ,δz aωx ,β (p −aωy |
,ωy ) / |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
−aγ,ωx |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
p |
|
|
|
|
(p −aβ,β ) −aβ,ωy aωy |
,β ] |
|
|
|
(p −aβ,β ) −aβ,ωy aωy ,β ] |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+aωy ,δн aβ,ωy aωy ,β}/ |
|
|
|
(p −aωx ,ωx ) |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
= p(p −a |
|
|
)[(p −a |
|
|
|
|
)(p −a |
|
|
|
) −a |
|
|
|
|
a |
|
|
|
] . (4.64) |
|
|
|
+aωy ,δэ aβ,ωy aωx ,β}/ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ωy ,β |
|
|
|
|
|
|
|
(p −aωx ,ωx ) |
|
|
|
|
|
|
|
[p(p −aωy ,ωy ) |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
ωx ,ωx |
|
|
|
|
|
|
|
|
ωy ,ωy |
|
|
|
|
|
β,β |
|
|
|
β,ωy |
|
|
|
|
|
(p −a |
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
Присоединенная матрица определяется через алгебраические до- |
|
|
|
ωx ,ωx |
|
|
|
|
|
[p(p −aωy ,ωy ) |
|
|
|
|
|
|
(p −aβ,β ) − |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
[p(p −aωy ,ωy ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
полнения определителя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(p −aβ,β ) − |
|
|
|
|
|
|
|
|
aβ,ωy aωy ,β ] |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
пр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(p −aβ,β ) − |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ωy aωy ,β ] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
Φбб(p) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ωy aωy ,β ] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
p[(p −aωy ,ωy ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aωy ,δн (p −aβ,β ) / |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
paβ,ωy aωx ,β |
|
|
|
|
|
paωx ,β(p −aωy ,ωy ) |
|
|
0 |
|
|
|
aωy ,δэ (p −aβ,β ) / |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,δz aωy ,β / |
|
|
|
|||||||||||||||||||||||||||||||||||
(p −aβ,β) −aβ,ωy aωy ,β ] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[p(p −a |
ωy |
,ωy |
) |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p(p −aω ,ω |
|
)(p −aβ,β) |
|
|
paω |
,β(p −aω ,ω ) |
|
|
|
|
|
|
[p(p −aωy ,ωy ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[p(p −aωy ,ωy ) |
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
(p −aβ,β ) − |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x x |
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
x |
|
x |
|
|
p(p −aωx ,ωx ) |
|
|
|
(p −aβ,β ) − |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(p −aβ,β ) − |
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
a |
|
|
|
] |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
a |
|
[(p −a |
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωy ,β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ωy aωy ,β ] |
|
|
|
|
|
|
|
|
|
β,ωy |
|
|
|
|
|
|
|
|
|
aβ,ωy aωy ,β ] |
|
|
|
|||||||||||||||||||||||||||||||
|
γ, |
ωx |
|
|
|
|
ωy ,ωy |
|
|
|
] |
|
|
aγ,ωx aβ,ωy aωx ,β |
|
|
aωx ,βaγ,ωx (p −aωy ,ωy ) |
|
[(p −aωy ,ωy )(p − |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
(p −a |
β,β |
) −a |
a |
ωx ,β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
β,ωx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
a |
|
|
/ |
|
|
|
|
|
a |
|
|
|
|
(p −a |
|
|
|
|
) / |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,β ) −aβ,ωy aωy ,β ] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β,ωy |
|
|
|
|
|
|
|
|
|
ωy ,ωy |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aωy ,δэ aβ,ωy / |
|
|
|
|
|
|
|
|
|
|
|
ωy ,δн |
|
|
|
|
|
|
|
|
β,δz |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
Тогда переходная матрица состояния |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[p(p −aωy ,ωy ) |
|
|
|
|
[p(p −aωy ,ωy ) |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[p(p −aωy ,ωy ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
Φбб(p) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(p −aβ,β ) − |
|
|
|
|
|
|
(p −aβ,β ) − |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(p −aβ,β ) − |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ωy aωy ,β ] |
|
|
|
|
|
|
aβ,ωy aωy ,β ] |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ωy aωy ,β ] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aγ,ω |
[(p −aω |
|
) |
|
{aω |
|
|
|
|
aγ,ω |
[(p −aω |
|
) |
|
|
|
a |
|
|
|
a |
|
|
|
|
a |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
{aω ,δ |
,ω |
|
,δ |
|
|
,ω |
|
|
|
β,δz |
ωx ,β |
γ,ωx |
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x э |
|
|
x |
y |
|
y |
|
|
|
x |
|
|
н |
|
|
|
|
x |
|
|
|
|
y |
|
y |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(p −aβ,β ) −aβ,ωy aωy ,β ] |
|
|
|
(p −aωy ,ωy ) / |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(p −aβ,β ) −aβ,ωy aωy ,β ] |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+aωy ,δэ aβ,ωy (p −aβ,β )}/ |
|
+aωy ,δн aβ,ωy (p −aβ,β )}/ |
|
|
|
p(p −aωx ,ωx ) |
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/ p(p −aωx ,ωx )[(p −aωy ,ωy ) |
/ p(p −aωx ,ωx )[(p −aωy ,ωy ) |
|
|
|
[(p −aωy ,ωy ) |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(p −a |
β,β |
) − |
|
|
|
|
|
(p −a |
β,β |
) − |
|
|
|
|
|
|
|
|
|
|
|
(p −aβ |
β ) − |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
a |
, |
|
|
|
] |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ωy aωy ,β ] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωy ,β |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aβ,ωy aωy ,β ] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β,ωy |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
56 |
май 2003г. |
В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
Введем следующие характеристики:
Время недемпфированных боковых короткопериодических колеба-
ний
T |
= |
|
|
|
|
1 |
|
|
|
= |
|
|
|
|
1 |
|
|
|
|
= |
|
1 |
. (4.68) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
β |
a |
|
a |
|
−a |
|
a |
|
|
|
|
|
ωy |
|
β |
|
|
|
β |
ω |
|
|||
|
|
ωy ,ωy |
β,β |
β,ωy |
ωy ,β |
|
M |
|
− M |
|
||||||||||||||
|
|
|
|
|
|
|
y |
F |
y |
β |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
zк |
|
|
|
|
|
|||||
Относительный коэффициент демпфирования боковых короткопериодических колебаний
|
|
|
ξ = − |
1 |
(a |
|
|
|
|
+ a |
β,β |
) a |
ωy ,ωy |
a |
β,β |
−a |
a |
ωy ,β |
= |
|||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
β |
|
2 |
|
ωy ,ωy |
|
|
|
|
|
|
β,ωy |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
hβ |
|
|
|
|||||
|
|
|
ωy |
|
|
β |
|
|
|
|
ωy |
|
β |
|
|
|
|
|
|
β |
|
|
|
= |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
(M |
y |
+ F ) |
M |
y |
F |
−M |
y |
= h |
T |
|
|
|
. (4.69) |
|
||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
zк |
|
|
|
|
zк |
|
|
|
|
|
|
|
|
β β |
|
|
ωβ |
|
|
|
|
|||||||
|
|
|
Постоянная времени по угловой скорости крена |
|
|
|||||||||||||||||||||||||||
|
|
|
T |
|
= − |
|
|
1 |
|
= − |
1 |
|
. (4.70) |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
ωx |
|
|
|
aωx ,ωx |
|
|
|
|
M |
ωx x |
|
|
|
|
|
|
|
|
|
|
|
||||||||
Коэффициент усиления по скорости крена в быстром боковом движении при отклонении элеронов
|
|
|
|
aω ,δ |
|
|
|
|
|
|
δэ |
|
|
δ |
|
|
э |
|
M |
||||||
k |
|
э |
= |
x |
= − |
|
|
|
|
x |
. (4.71) |
|
|
|
|
|
|
|
|
|
|||||
|
ωx |
|
aωx ,ωx |
|
M |
ωx x |
||||||
Коэффициент усиления по угловой скорости крена ∆ωx через пе-
рекрестную связь по угловой скорости рыскания ∆ωy при отклоне-
нии элеронов
|
|
|
|
δ |
|
|
|
= − |
|
|
|
|
|
|
|
|
|
|
aωx ,βaβ,ωy aωy ,δэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
kωэ |
,ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
aωx ,ωx [aωy ,ωy aβ,β −aβ,ωy aωy ,β ] |
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
x |
|
|
y |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
βy |
|
|
|
δyэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= − |
|
|
|
|
|
M |
M |
|
|
|
|
|
|
|
. (4.72) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
ωx [M |
ωy |
|
|
|
β − |
|
|
|
|
β ] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
M |
F |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
x |
|
|
|
|
|
y |
|
|
zк |
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Коэффициент усиления по угловой скорости рыскания при откло- |
|||||||||||||||||||||||||||||||||||||||
нении элеронов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
a |
|
|
|
|
|
|
|
|
|
|
|
β |
|
δэ |
|
|
|||||||
|
δ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β,β |
ωy ,δэ |
|
F |
M |
|
|
|||||||||||||||||||
k |
э = − |
|
|
|
|
|
|
|
|
|
|
|
|
|
= − |
|
|
|
zк |
|
|
|
y |
|
. (4.73) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
ωy |
|
[aωy ,ωy aβ,β |
−aβ,ωy aωy ,β ] |
|
|
|
ωy |
|
β − |
|
β |
] |
||||||||||||||||||||||||||||
|
|
|
[M |
F |
M |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
zк |
|
|
y |
|
|
|||||
|
|
Постоянная времени по углу рыскания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
T |
= − |
1 |
|
|
|
= − |
1 |
. (4.74) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
ψ |
|
|
|
|
aβ,β |
|
|
|
Fβ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
zк |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Коэффициент усиления по углу скольжения при отклонении элеро-
нов
|
|
|
aβ,ωy aωy ,δэ |
|
|
|
|
|
|
|
|
δyэ |
|
|
|||||
δ |
= |
|
= |
M |
|
|
|||||||||||||
kβэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. (4.75) |
||
[aωy ,ωy aβ,β |
−aβ,ωy aωy ,β ] |
|
|
|
ωy |
|
|
β |
− |
|
β |
|
|||||||
|
|
|
|
|
|
|
|
] |
|||||||||||
|
|
|
[M |
F |
M |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
y zк |
|
|
y |
|
|
||||
Коэффициент усиления по углу крена ∆γ при отклонении элеро-
нов
|
|
aβ,ωy aωy ,δэ |
|
|
|
|
|
δyэ |
|
|
|
δ |
= − |
= − |
M |
= k |
δ |
|
|||||
kβэ |
|
|
|
|
|
|
|
э . (4.76) |
|||
|
|
|
|
|
|
|
|||||
|
|
aωx ,ωx |
|
|
M |
ωx x |
|
ωx |
|||
Коэффициент усиления по углу крена ∆γ через перекрестную связь с угловой скоростью рыскания ∆ωy при отклонении элеронов
|
|
δ |
= − |
|
|
|
|
|
|
aβ,βaβ,ωy aωy ,δэ |
||||||||
kγ,эωy |
|
|
|
|
|
|
|
|
|
|||||||||
aωx ,ωx |
[aωy ,ωy aβ,β −aβ,ωy aωy ,β ] |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
β |
|
|
|
δэ |
|
|
|
|
||
|
|
|
|
F |
M |
|
|
|
|
|||||||||
= − |
|
|
|
|
|
|
zк |
|
|
|
|
y |
|
|
|
. (4.77) |
||
|
|
ωx |
|
|
|
ωy |
|
|
β − |
|
β ] |
|||||||
M |
[M |
F |
M |
|||||||||||||||
|
|
|
x |
|
|
|
|
y |
|
|
|
zк |
|
|
y |
|||
Коэффициент усиления по угловой скорости крена ∆ωx при отклонении рулей направления
|
|
|
|
aω |
|
|
|
|
|
|
|
δн |
|
|
δ |
|
|
,δ |
н |
|
M |
||||||
k |
|
н |
= − |
x |
|
= − |
|
|
|
|
x |
. (4.78) |
|
|
|
|
|
|
|
|
|
|
|||||
|
ωx |
|
aωx ,ωx |
|
|
M |
ωx x |
||||||
Коэффициент усиления по угловой скорости рыскания через перекрестную связь с угловой скоростью крена при отклонении рулей направления
|
|
δ |
|
= − |
|
|
|
|
|
|
|
aωx ,βaβ,ωy aωy ,δн |
||||
kωнy ,ωx |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
aωx ,ωx |
[aωy ,ωy aβ,β −aβ,ωy aωy ,β ] |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
βx |
|
|
|
δyн |
|
|
|
||
= − |
|
|
|
M |
M |
|
|
. (4.79) |
||||||||
|
|
ωx [M |
ωy |
|
|
|
|
β − |
|
|
β ] |
|||||
M |
F |
M |
||||||||||||||
|
|
|
x |
|
|
|
y |
|
|
|
zк |
|
y |
|||
Коэффициент усиления по угловой скорости рыскания при отклонении рулей направления
|
|
|
|
a |
|
a |
|
|
|
|
|
|
|
|
|
|
|
β |
|
δн |
|
|
|
|
|||||||||
|
δ |
|
|
β,β |
ωy ,δн |
|
|
|
|
|
|
|
F |
M |
|
|
|
|
|||||||||||||||
k |
н = − |
|
|
|
= − |
|
|
|
|
zк |
y |
|
|
|
. (4.80) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
ωy |
[aωy ,ωy aβ,β −aβ,ωy aωy ,β ] |
|
|
|
[M |
ωy |
|
F |
β − |
M |
β |
] |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
zк |
|
|
|
|
y |
|
|
|
|||||||
|
|
Коэффициент усиления по углу скольжения |
|
|
|
∆β при отклонении |
|||||||||||||||||||||||||||
рулей направления |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
aβ,ωy aωy ,δн |
|
|
|
|
|
|
|
|
|
|
|
|
δyн |
|
|
|
|
|
|
|
|
||||||||
|
|
δ |
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
kβн = |
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. (4.81) |
||
|
|
[aωy ,ωy aβ,β −aβ,ωy aωy ,β ] |
|
|
ωy |
|
|
|
β − |
|
|
β |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
] |
|
|||||||||||||||||||||||
|
|
|
|
|
[M |
F |
M |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
zк |
|
|
|
|
y |
|
|
|
|||||||
|
|
Коэффициент усиления по углу |
крена ∆γ |
|
|
|
|
|
через |
перекрестную |
|||||||||||||||||||||||
связь с угловой скоростью рыскания ∆ωy при отклонении рулей на-
правления
|
|
δ |
= − |
|
|
|
|
|
|
aβ,βaβ,ωy aωy ,δн |
||||||||
kγ,нωy |
|
|
|
|
|
|
|
|
|
|||||||||
aωx ,ωx |
[aωy ,ωy aβ,β −aβ,ωy aωy ,β ] |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
β |
|
|
|
δн |
|
|
|
|
||
|
|
|
|
F |
M |
|
|
|
|
|||||||||
= − |
|
|
|
|
|
|
zк |
|
|
|
|
y |
|
|
|
. (4.82) |
||
|
|
ωx |
|
|
|
ωy |
|
|
β − |
|
β ] |
|||||||
M |
[M |
F |
M |
|||||||||||||||
|
|
|
x |
|
|
|
|
y |
|
|
|
zк |
|
|
y |
|||
Коэффициент усиления по угловой скорости крена ∆ωx при отклонении органов управления боковой силой
|
|
δ |
= |
|
|
|
|
|
|
|
aβ,δ aω ,βaω |
,ω |
y |
|||||||||
kωz |
|
|
|
|
|
|
|
|
z |
|
x |
y |
|
|||||||||
aωx ,ωx [aωy ,ωy aβ,β −aβ,ωy aωy ,β] |
||||||||||||||||||||||
|
|
|
x |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
δz |
|
β |
|
ωy |
|
|
|
|
|
|||||||
|
|
|
|
F |
M |
M |
|
|
|
|
|
|||||||||||
= − |
|
|
|
|
zк |
x |
y |
|
. (4.83) |
|
||||||||||||
|
|
ωx [M |
ωy |
|
β |
− |
|
β |
] |
|
||||||||||||
M |
F |
M |
|
|||||||||||||||||||
|
|
|
x |
|
|
|
|
|
y |
|
zк |
|
|
y |
|
|
|
|
|
|||
Постоянная времени по угловой скорости рыскания ∆ωy
T |
= − |
1 |
= − |
1 |
. (4.84) |
||
|
|
||||||
ωy |
|
aωy ,ωy |
|
|
|
ωy y |
|
|
M |
||||||
Коэффициент усиления самолета по угловой скорости рыскания ∆ωy при отклонении органов управления боковой силой
|
|
|
|
|
aβ,δz aωy ,β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
zδz |
|
|
|
||||||||
k |
δ |
|
= |
|
= − |
|
|
|
|
|
|
|
|
F |
|
|
|
||||||||||||||
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
. (4.85) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
ωy |
|
[aωy ,ωy aβ,β −aβ,ωy aωy ,β ] |
|
|
|
|
|
ωy |
|
|
β |
− |
|
|
β |
] |
||||||||||||||
|
|
|
[M |
F |
M |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
zк |
|
|
|
|
y |
|
|
|
|||||
Коэффициент усиления по углу скольжения |
∆β при отклонении |
||||||||||||||||||||||||||||||
органов управления боковой силой |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
aβ,δz aωy ,ωy |
|
|
|
|
|
|
|
zδz |
|
ωy y |
|
|
|
|||||||||||||
|
δ |
|
= |
|
= − |
|
|
|
|
F |
M |
|
|
|
|||||||||||||||||
kβz |
|
|
|
|
|
|
к |
|
|
|
|
|
|
. (4.86) |
|||||||||||||||||
[aωy ,ωy aβ,β −aβ,ωy aωy ,β ] |
|
|
|
|
|
|
β |
− |
|
|
β |
|
|||||||||||||||||||
|
|
|
|
[M |
ωy |
|
F |
M |
] |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
zк |
|
|
|
|
y |
|
|
|
||||||
Сучетом введенных обозначений передаточные функции самолета
вбыстром боковом движении сведены в табл.4.1.
Структурно-динамическая схема быстрого бокового движения самолета при управляющих воздействиях представлена на рис.4.5.
____________________________________________________________________________________________________________________________
57 май 2003г.
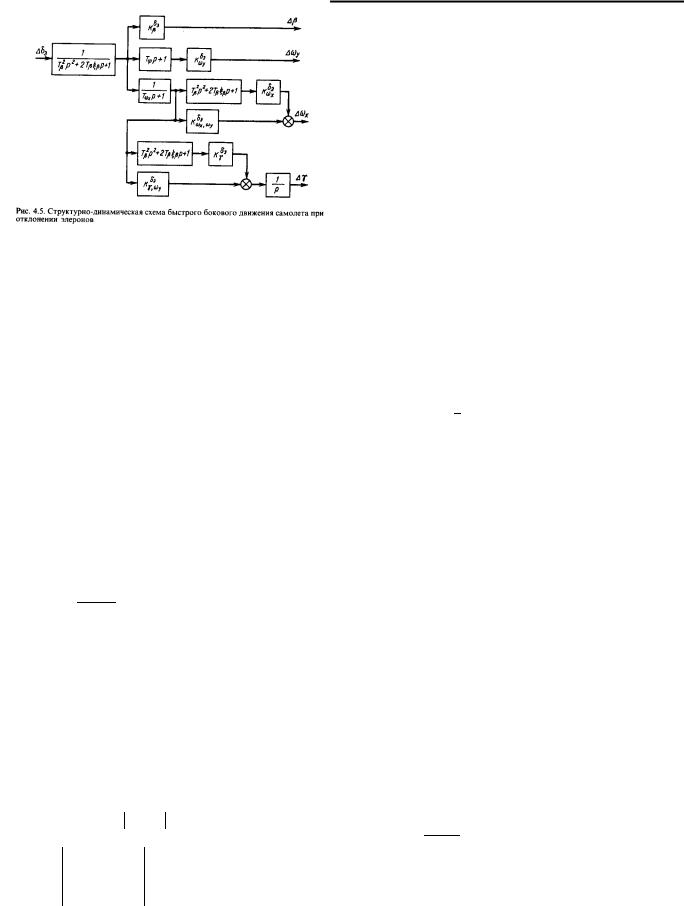
ДИНАМИКА БОКОВОГО ДВИЖЕНИЯ САМОЛЕТА
Передаточные функции самолета в траекторном боковом вынужденном движении по управляющим параметрам быстрого бо-
кового движения. Управление траекторным боковым движением осуществляется посредством изменения параметров быстрого бокового
движения - угла крена ∆γ и угла скольжения ∆β. Рассмотрим модель бокового траекторного движения самолета (4.16):
xбт (t) = Aбтxбт (t) +Bбту uбту (t) . (4.87)
Вектор-столбец входа по управляющим воздействиям ∆β и ∆γ
[uбту (t)]T =[∆β(t) ∆γ(t)] . (4.88)
Матрица входа по управляющим воздействиям ∆β и ∆γ
|
0 |
−aβ,γ |
|
|
у |
|
|
|
|
Bбт = aΨ,β |
aΨ,γ |
. (4.89) |
||
|
0 |
0 |
|
|
|
|
|
||
Дополним уравнения состояния (4.87) уравнением выхода
yбт (t) = Cбтxбт(t) , (4.90) |
|
|
|||
где |
yбт (t), |
Cбт - соответственно вектор-столбец и матрица вы- |
|||
хода |
в |
боковом |
траекторном |
движении |
причем |
Cбт = I, yбт(t) = xбт (t) .
Определим передаточную матрицу самолета в боковом траекторном движении по управляющим воздействиям следующим образом
Wу (p) = Yбт(p) = (pI − Aбт)−1Bу = Φбт(p)Bу , (4.91)
бт у бт бт
Uбт (p)
где Φбт(p) = (pI − Aбт)−1 - переходная матрица состояния бокового траекторного движения самолета.
Элементами матрицы Wбту (p) являются передаточные функции самолета по управляющим воздействиям Uбту (p) :
|
W∆β |
(p) |
W∆γ |
(p) |
|
|
Wу |
|
∆ψ |
|
∆ψ |
|
|
(p) = W∆β |
(p) |
W∆γ |
(p) |
. (4.92) |
||
бт |
|
∆Ψ |
|
∆Ψ |
|
|
|
W∆β |
(p) |
W∆γ |
(p) |
|
|
|
|
∆z |
|
∆z |
|
|
Переходная матрица состояния бокового траекторного движения определяется следующим образом
Φбт(p) = Φпрбт (p) / Φбт(p) , (4.93)
Определитель матрицы
|
p |
0 |
0 |
|
∆(p) = |
0 |
p |
0 |
= p3 . (4.94) |
−az,Ψ 0 p
Присоединенная матрица, определяемая через алгебраические дополнения определителя следующим образом
|
|
|
p2 |
|
0 |
|
0 |
|
|||
Φбтпр(p) = |
|
|
0 |
|
p2 |
|
|
|
|||
|
|
|
0 . (4.95) |
||||||||
|
|
−az,Ψ |
0 |
|
p2 |
|
|||||
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Тогда переходная матрица состояния |
|||||||||||
|
|
|
1 |
|
0 |
|
0 |
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
p |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Φбт(p) = |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
0 |
|
|
0 |
|
, (4.96) |
||||
|
|
|
p |
||||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
az,Ψ |
|
|
|
1 |
|
|
||
|
− |
|
|
|
0 |
|
|
|
|
||
|
|
|
2 |
|
|
|
|||||
|
|
|
|
p |
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
а передаточная матрица самолета в боковом траекторном движении
|
|
0 |
|
|
− |
aβ,γ |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
p |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
Wбту |
a |
Ψ,β |
|
|
|
a |
Ψ,γ |
|
|
|
||||
(p) = |
|
|
|
|
|
|
|
. (4.97) |
||||||
|
p |
|
|
|
|
p |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
0 |
|
a |
z,Ψ |
a |
|
|
|
|
|
|||
|
|
|
|
|
β,γ |
|
||||||||
|
|
|
|
|
|
|
p |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Введем следующие характеристики.
Коэффициент усиления по углу рыскания при изменении угла кре-
на
kγ = −a = −Fγa . (4.98)
ψ β,γ zк
Коэффициент усиления по углу пути при изменении угла скольже-
ния
β |
|
|
β |
|
|
|
|
||
kΨ |
= aΨ,β = −Fzк |
. (4.99) |
||
Коэффициент усиления по углу пути при изменении угла крена
kγ |
= a |
|
= − |
|
γa . (4.100) |
Ψ,γ |
F |
||||
Ψ |
|
|
zк |
||
Коэффициент усиления по боковому отклонению при изменении угла пути
kΨz = az,Ψ = −V0 . (4.101)
Сучетом введенных обозначений передаточные функции самолета
вбоковом траекторном движении по управляющим параметрам быстрого бокового движения определим следующим образом:
W∆γ |
|
|
kψγ |
, W∆β (p) = |
kβψ |
, W∆γ |
|
kγ |
||
(p) = |
|
|
(p) = |
Ψ |
, |
|||||
|
|
|
||||||||
∆ψ |
|
|
p |
|
∆ψ |
p |
∆Ψ |
|
p |
|
|
|
|
|
|
|
|
||||
W∆γ |
(p) = |
kψγ kzΨ |
. (4.102) |
|
|
|
|
|
||
|
|
|
|
|
|
|||||
∆z |
|
|
p2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Передаточные функции самолета в полном боковом вынужденном движении по управляющим воздействиям. Рассмотрим мо-
дель полного бокового вынужденного движения при наличии управляющих воздействий:
xб(t) = Aбxб(t) + Bбуuбу(t) . (4.103)
yб(t) = xб(t) . (4.104)
Определим передаточную матрицу самолета в полном боковом движении по управляющим воздействиям
Wбу(p) = Yбу(p) = (pI − Aбт)−1Bбу = Φб(p)Bбу , (4.105) Uб (p)
где Φб(p) = (pI − Aб)−1 переходная матрица состояния боко-
вого движения самолета. |
|
|
|
Wу(p) связано с обращением |
Определение матриц |
Φ |
б |
(p) и |
|
|
|
|
б |
|
матрицы (pI − Aбт)−1 , |
что при ее высокой размерности (7x7) до- |
|||
вольно затруднительно. Если пренебречь медленным спиральным движением и воспользоваться результатами, полученными в первой и во второй части данного параграфа, то задача существенно упрощается:
58 |
май 2003г. |
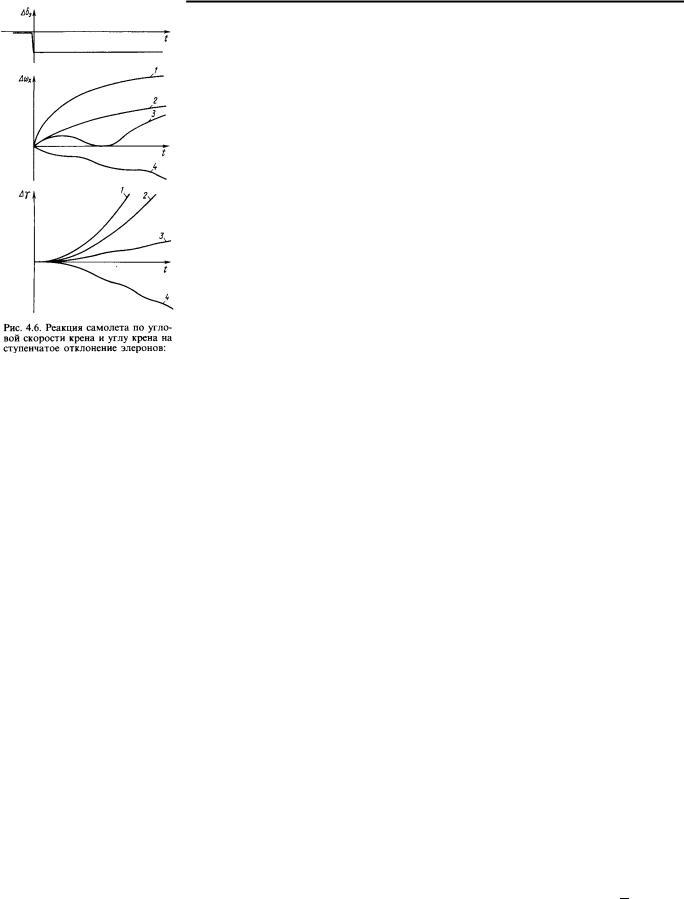
В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
|
W∆δэ (p) = W∆δэ |
(p)W∆γ |
(p) , |
|
|
|
|
|
|
|
|
|
|
|
|
|
мента рыскания Myδэ |
> 0 , под действием которого самолет приобре- |
||||||||||||||||||||||
|
|
∆ψ |
|
|
|
|
|
∆γ |
|
|
|
|
∆ψ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆ωy > 0 и, как |
||
W∆δн (p) = W |
∆δн |
(p)W∆γ |
(p) , |
|
|
|
|
|
|
|
|
|
|
|
|
|
тает |
положительную |
угловую |
скорость |
рыскания |
|||||||||||||||||||
∆ψ |
|
|
∆γ |
|
|
|
|
|
∆ψ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
следствие, положительное приращение угла скольжения ∆β > 0 . Из- |
|||||||||||||
|
W∆δz (p) = W∆δz |
(p)W∆γ |
(p) , |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
за положительного скольжения возникает отрицательный момент крена |
||||||||||||||||||||||||||
|
|
∆ψ |
|
|
|
|
|
∆γ |
|
|
|
|
∆ψ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
W∆Ψ∆δэ (p) = W∆β∆δэ (p)W∆Ψ∆β (p) + W∆γ∆δэ (p)W∆Ψ∆γ (p) , |
|
|
|
|
|
Mxβ < 0 (так как mβx < 0 у статически устойчивого самолета), ко- |
||||||||||||||||||||||||||||||||||
W∆δн (p) = W |
∆δн |
(p)W∆β |
(p) + W∆δн |
(p)W∆γ |
(p) , |
|
|
|
|
|
торый складывается с отрицательным моментом |
mδxэ ∆δэ < 0 . Это |
||||||||||||||||||||||||||||
∆Ψ |
|
∆β |
|
|
|
|
|
∆Ψ |
|
|
|
|
∆γ |
|
|
∆Ψ |
|
|
|
|
|
|
|
|
приводит к дополнительной «подкрутке» самолета. |
|
||||||||||||||
W∆δz (p) = W |
∆δz |
(p)W |
∆β |
(p) + W∆δz |
(p)W∆γ |
(p) , |
|
|
|
|
|
|
Если при наличии у самолета поперечной статической устойчиво- |
|||||||||||||||||||||||||||
∆Ψ |
|
∆β |
|
|
|
|
|
∆Ψ |
|
|
|
|
∆γ |
|
|
|
∆Ψ |
|
|
|
|
|
|
|
|
сти отклонение элеронов на положительный угол вызывает отрица- |
||||||||||||||
|
W∆δэ (p) = W∆δэ |
(p)W∆γ |
(p) , |
|
|
|
|
|
|
|
|
|
|
|
|
|
тельный момент рыскания |
M |
< 0 , |
то |
kδэ |
< 0 и установив- |
||||||||||||||||||
|
|
∆z |
|
|
|
|
|
∆γ |
|
|
|
|
∆z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yδэ |
|
|
ωx ,ωy |
|
||
W∆δн (p) = W |
∆δн |
(p)W∆γ |
(p) , |
|
|
|
|
|
|
|
|
|
|
|
|
|
шаяся угловая скорость крена уменьшается по сравнению со значением |
|||||||||||||||||||||||
∆z |
|
|
∆γ |
|
|
|
|
|
∆z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в изолированном движении крена. Такое взаимодействие движений |
|||||||||||||
|
W∆δz (p) = W∆δz |
(p)W∆γ |
(p) . (4.106) |
|
|
|
|
|
|
|
|
|
рыскания и крена приводит к явлению зависания самолета по крену, |
|||||||||||||||||||||||||||
|
|
∆z |
|
|
|
|
|
∆γ |
|
|
|
|
∆z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
когда при отклонении элеронов угол крена поначалу возрастает, а затем |
||||||||||
Тогда передаточные функции самолета в полном боковом движе- |
его рост замедляется. Может установиться и постоянное значение угла |
|||||||||||||||||||||||||||||||||||||||
нии по управляющим воздействиям сведем в табл.4.2. |
|
|
|
|
|
|
крена. Это приводит к уменьшению эффективности поперечного управ- |
|||||||||||||||||||||||||||||||||
Реакция самолета на ступенчатые отклонения органов управ- |
ления. |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
ления в боковом быстром движении. Реакция самолета на управляю- |
|
Наконец, если kδэ |
< 0 и k |
δэ |
> kδэ , |
возникает обратная |
||||||||||||||||||||||||||||||||||
щие воздействия в боковом движении зависит от его аэродинамических |
|
ωx ,ωy |
|
|
ωx ,ωy |
ωx |
|
|||||||||||||||||||||||||||||||||
характеристик, а также от динамических характеристик самих управ- |
реакция самолета на отклонение элеронов. |
Это объясняется тем, что |
||||||||||||||||||||||||||||||||||||||
ляющих воздействий. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
отрицательный момент Myδэ |
< 0 |
будет |
вызывать отрицательную |
|||||||||||||||
Маневр самолета в боковой плоскости осуществляется энергичным |
||||||||||||||||||||||||||||||||||||||||
отклонением |
элеронов |
|
∆δэ , руля |
направления |
|
∆δн |
или |
органа |
угловую скорость рыскания ∆ωy < 0 и отрицательный угол скольже- |
|||||||||||||||||||||||||||||||
управления боковой силой |
|
∆δz . При этом закон изменения |
∆δэ , |
ния |
∆β < 0 . Поэтому |
возникает |
положительный момент крена |
|||||||||||||||||||||||||||||||||
∆δн и ∆δz |
близок к скачкообразному, то есть ступенчатому. Рас- |
Mxβ > 0 , который будет тормозить движение крена или даже изме- |
||||||||||||||||||||||||||||||||||||||
смотрим реакцию самолета на ступенчатое отклонение элеронов ∆δэ |
нит его направление. |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
Единичное изменение |
|
∆δэ(t) =1(t) , |
изображение которого по |
|
Реакция самолета по угловой скорости крена и углу крена на сту- |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пенчатое отклонение элеронов показана на рис.4.6. Типичным для со- |
||||||||
Лапласу ∆δэ(p) = |
|
, описывает переходные функции по параметрам |
временных самолетов со стреловидными крыльями является кривая 2. С |
|||||||||||||||||||||||||||||||||||||
|
|
увеличением угла атаки самолета увеличивается взаимное влияние |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
быстрого бокового движения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
движений рыскания и крена, сильнее проявляется «зависание». |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kδэ (T2p2 |
+ 2T ξ p +1) + kδэ |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
∆ω |
x |
(p) = ∆δ |
э |
(p)W∆δэ |
(p) = |
|
ωx |
|
β |
|
|
β |
β |
|
|
|
ωx ,ωy |
, |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
∆ω |
|
|
|
|
p(Tω |
p +1)(Tβ2p2 + 2Tβξβp +1) |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kδэ |
(T |
|
p +1) |
|
|
|
|
|
|
|
|
|
|
|
|
||||
∆ω |
y |
(p) = ∆δ |
э |
(p)W∆δэ |
(p) = |
|
|
|
|
|
|
ωy |
ωx |
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
||||||||||||
|
p(T |
|
p +1)(T2p2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
∆ωy |
|
|
|
|
|
+ 2T ξ p +1) |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
β |
|
|
|
β β |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆β(p) = ∆δ |
э |
(p)W |
∆δ |
э (p) = |
|
|
|
|
kβδэ |
|
|
|
|
. (4.107) |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
p(T2p2 |
+ 2T ξ |
|
p + |
1) |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
∆β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β |
|
|
β |
β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Установившееся значение угловой скорости крена при отклонении элеронов
|
|
|
|
|
|
kωδэ |
|
|
|
|
|
|
δRэ |
|
|
|
|
|
1 |
|
|
δ |
|
|
M |
||||
(∆ω |
) |
|
= lim{p |
|
|
x |
} = k |
э |
= − |
|
|
x |
. (4.108) |
|
|
|
|
|
|
|
|
||||||||
x |
|
уст |
p→0 |
p Tω p +1 |
ωx |
|
|
M |
ωx |
|||||
|
|
|
|
|
|
x |
|
|
|
|
|
|
Rx |
|
Так как угол крена равен интегралу скорости крена, то реакцией самолета в изолированном движении крена на ступенчатое отклонение элеронов будет равномерное нарастание угла крена.
В общем случае условие изолированности кренового движения не выполняются и реакция самолета по угловой скорости крена на ступенчатое отклонение элеронов будет отличаться от рассмотренного.
Если самолет обладает поперечной статической устойчивостью и при отклонении элеронов на положительный угол момент рыскания от
|
|
δэ |
> 0) , то |
δэ |
> 0 и устано- |
|
|
||||
элеронов тоже положителен (MRx |
kωx ,ωy |
||||
вившаяся угловая скорость крена возрастает по сравнению с рассмотренным случаем изолированного движения крена из-за взаимодействия движений крена и рыскания. Такое влияние движения рыскания на движение крена приводит к раскачке самолета пилотом и ухудшению поперечной управляемости самолета несмотря на кажущееся увеличение эффективности управления.
Объяснение этого явления следующее. Положительное отклонение элеронов ∆δэ > 0 приводит к возникновению положительного мо-
Реакция самолета на ступенчатое отклонение руля направления в боковом быстром движении. Единичное изменение
∆δн =1(t) , изображение которого по Лапласу ∆δн = 1p описывает переходные функции по параметрам быстрого бокового движения:
____________________________________________________________________________________________________________________________
59 май 2003г.
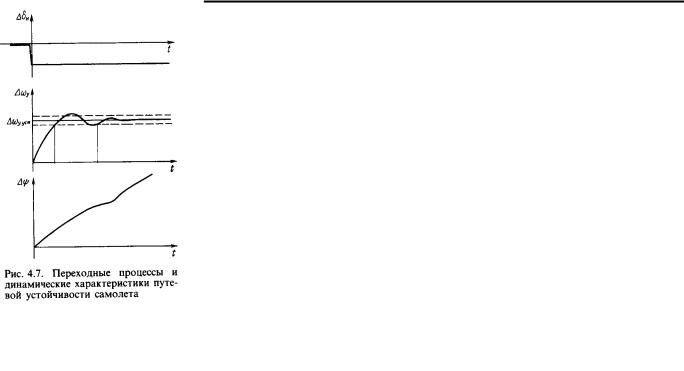
ДИНАМИКА БОКОВОГО ДВИЖЕНИЯ САМОЛЕТА
∆ω |
x |
(p) = ∆δ |
н |
|
(p)W∆δн (p) = |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
∆ωx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
kδн (T2p2 + 2T ξ p +1) + kδн |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
ωx |
β |
|
|
|
β |
β |
|
ωx ,ωy |
, |
|
|
|
|
|
|
|
|
|
|||||
p(T p +1)(T |
2p2 + 2T ξ p +1) |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
ωx |
|
β |
|
β |
β |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kδн |
(T p +1) |
|
|
|
|||
∆ω |
y |
(p) = ∆δ |
н |
(p)W∆δн (p) = |
|
|
|
|
|
|
ωy |
ψ |
|
|
|
|
|
, |
|||||
p(T p |
+1)(T2p2 |
+ 2T ξ |
|
|
|||||||||||||||||||
|
|
|
|
|
∆ωy |
|
β |
p +1) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
β |
|
β |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
∆β(p) = ∆δ |
н |
(p)W |
∆δ |
н (p) = |
|
|
|
|
kβδн |
|
|
. (4.109) |
|
|||||||||
|
|
p(T2p2 + 2T ξ |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
∆β |
|
|
|
|
p +1) |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β |
|
β β |
|
|
|
|
|
||
|
∆γ(p) = ∆δ |
н |
(p)W∆δн (p) = |
1 |
∆ω |
x |
(p) . |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
∆γ |
|
|
p |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ную роль и для управления рысканием почти не используется. Требования к реакции самолета по угловой скорости крена при отклонении руля направления более критичны.
После окончания боковых короткопериодических колебаний произойдет формирование новых установившихся значений параметров быстрого бокового движения
(∆ω ) |
уст |
= (kδн |
+ kδн |
,ω |
|
)∆δ |
н |
, (∆ω |
y |
) |
уст |
= kδн |
∆δ |
н |
, |
||
x |
ω |
x |
ω |
y |
|
|
|
ω |
y |
|
|
||||||
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|||
∆βуст = kβδн ∆δн . (4.110)
|
|
Из анализа переходных функций (4.109) видно, что реакция само- |
|
|
||||||||||||||||||||||||
лета в быстром боковом движении по угловой скорости рыскания |
|
|
||||||||||||||||||||||||||
∆ωy |
и углу скольжения ∆β на ступенчатое отклонение руля направ- |
Прямая или обратная реакция по угловой скорости крена и по углу |
||||||||||||||||||||||||||
ления аналогична реакции самолета в продольном короткопериодиче- |
||||||||||||||||||||||||||||
крена определяется величиной и знаком момента крена от руля направ- |
||||||||||||||||||||||||||||
ском движении по угловой скорости тангажа |
∆ω |
и углу атаки ∆α |
δн |
|
||||||||||||||||||||||||
на ступенчатое отклонение руля высоты: |
|
z |
|
|
|
|
|
|
|
|
ления mx ∆δн . Если у самолета, обладающего поперечной и путевой |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
устойчивостью mδxн < 0 , то kωδн ,ω |
< 0 и установившаяся угловая |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
∆δэ |
(p) = |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
∆γ(p) = ∆δэ(p)W∆γ |
|
|
|
|
|
|
|
|
|
|
|
|
y |
x |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
δэ |
2 |
|
2 |
|
|
|
|
|
|
δэ |
|
|
|
|
|
|
|
|
|
|
|
|
скорость крена уменьшается за счет взаимодействия движений крена и |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рыскания. Это будет способствовать появлению обратной реакции |
||||||||
|
kωx (Tβ p |
|
+ 2Tβξβp +1) + kωx ,ωy |
|
|
|
|
|
|
|
|
|
|
|
|
самолета по углу крена. Следовательно, при «даче левой ноги» пилотом |
||||||||||||
|
|
|
|
|
. (4.111) |
|
|
|
|
|
|
|
|
|
|
(отклонение руля направления влево) может появиться правый крен. |
||||||||||||
|
p2 (T |
p |
+1)(T2p2 |
+ 2T ξ p +1) |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
ωx |
|
|
|
β |
|
|
β |
β |
|
|
|
|
|
|
|
|
|
|
|
|
Такое явление может возникнуть при уменьшении поперечной устой- |
|||||
|
|
После окончания боковых короткопериодических колебаний про- |
чивости и увеличении по модулю производной mδxн , что наиболее |
|||||||||||||||||||||||||
изойдет формирование новых установившихся значений параметров |
вероятно при полете самолета на малых углах атаки. |
|||||||||||||||||||||||||||
быстрого бокового движения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
(∆ω ) |
уст |
= lim{p∆δ |
э |
(p)W∆δэ |
(p)} = (kδэ |
+ kδэ |
,ω |
)∆δ |
э |
, |
|
|
||||||||||||||
|
|
|
|
x |
|
p→0 |
∆ω |
x |
|
|
ω |
|
|
ω |
x |
y |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
||||||||
|
|
(∆ω |
y |
) |
уст |
= lim{p∆δ |
э |
(p)W∆δэ |
(p)} = kδэ ∆δ |
э |
, |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
p→0 |
∆ωy |
|
|
ωy |
|
|
|
|
|
|
|
|
|
||||||||||
∆β |
уст |
= |
|
lim{p∆δ |
э |
(p)W |
∆δэ (p)} = kδэ ∆δ |
э |
. (4.112) |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
p→0 |
|
|
∆β |
|
β |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Угол крена будет нарастать. Если отклонение элеронов не вызывает изменения угловой скорости рыскания ( MyδЭ = 0 ) или самолет ней-
трален в отношении поперечной статической устойчивости (Mxβ = 0) , то при отклонении элеронов в соответствии с принятыми
допущениями (sin α = 0, mωy x = 0, mωx y = 0) будет иметь место изолированное движение крена.
Тогда (kδэ = 0, kδэ = 0, kδэ = 0) передаточная функция
ωx ,ωy ωy β
самолета по угловой скорости крена при отклонении элеронов принимает вид
W∆δэ (p) = |
kωδэx |
|
, (4.113) |
|
Tω |
|
+1 |
||
∆ωx |
p |
|
||
|
|
x |
|
|
а переходный процесс после мгновенного ступенчатого отклонения элеронов на один градус определится следующим образом:
|
kωδэ |
|
− |
t |
|
||
ωx (t) = |
(1−e |
T |
|||||
x |
|
|
ωx ) . (4.114) |
||||
57,3 |
|||||||
|
|
|
|
|
|||
Поэтому вид переходных процессов и динамические характеристики путевой устойчивости самолета в быстром боковом движении аналогичны переходным процессам и динамическим характеристикам продольной устойчивости самолета (рис.4.7). Однако руль направления при управлении боковым движением играет в основном вспомогатель-
60 |
май 2003г. |