

учебник Кузнецова 2003
.pdfГлава 5. АВТОМАТИЗИРОВАННОЕ УПРАВЛЕНИЕ РУЛЯМИ
оказывается достаточно малой (Tрп=0,01-0,02с). Тогда в приближенных исследованиях динамикой РП можно пренебречь, полагая Tрп ≈1.
Рассмотрим переходный процесс при скачкообразном изменении входного сигнала на единицу (Xвх(p) = 1). Тогда согласно (5.3) получим
−t
xвых (t) =1−e Tрп . (5.4)
Рассмотрим упрощенную модель рулевого агрегата в виде следующих дифференциальных уравнений:
xвых (t) = kраxпрг (t) , (5.5)
xпрг (t) = |
1 |
[uвх (t) − xпрг (t)] , (5.6) |
|
||
|
Tра |
|
где xгпр - координата, характеризующая подвод гидравлической
энергии; kра, Tра - коэффициент усиления и постоянная времени РА. Решая уравнения (5.5),(5.6) с помощью преобразования Лапласа:
pXвых (p) = kра[Xпрг (p) + Xвых (0)] , (5.7)
Xпрг (p) = |
1 |
[Uвх (p) −Xпрг (p) − Xпрг (0)] , (5.8) |
|
||
|
Tра |
|
и полагая Xвых(0) = Xпр(0) = 0, определим передаточную функцию
РА
W (p) = |
X |
вых |
(p) |
= |
kра |
. (5.9) |
|
|
|
|
|||
ра |
Uвх (p) |
|
р(Tрар+1) |
|
||
|
|
|
||||
Таким образом, динамика РА может быть описана динамикой усилительного, апериодического и интегрирующего звеньев. Обычно постоянную времени РА выбираю достаточно малой (Tра=0,01-0,03с). Тогда в приближенных исследованиях запаздыванием РА пренебрегают, полагая
Wра (p) kpра . (5.10)
Рассмотрим переходной процесс при скачкообразном изменении входного сигнала на единицу (Uвх(p)=1). Тогда согласно (5.10)
xвых (t) = kраt . (5.11)
Рассмотрим упрощенную модель рулевой машины в виде следующих дифференциальных уравнений:
ϕвых (t) = kрмxпрэ (t) , (5.12)
Полученные передаточные функции РА (5.10) и РМ (5.14) позволяют исследовать динамику сервоприводов. Рассмотрим сначала модель электрогидравлического сервопривода без обратной связи. Пусть передаточная функция усилителя определяется Wу(p) = kу, где kу - коэффициент усиления. Тогда передаточная функция электрогидравлического сервопривода без обратной связи
Wэг (p) = Wy (p)Wра (p) = ky kра  р= kэг / p (5.15)
р= kэг / p (5.15)
Ступенчатый единичный входной сигнал такой сервопривод отрабатывает как интегрирующее звено:
xвых (t) = kэгt . (5.16)
Переходный процесс показан на рис.5.9а (кривая 1).
Передаточная функция электромеханического сервопривода без обратной связи
Wэм(p) = Wy (p)Wрм(p) =
= |
ky kрм |
= |
kэм |
(5.17) |
р(T p +1) |
р(T p +1) |
|
||
|
рм |
|
рм |
|
где kэм= kу kрм - коэффициент усиления электромеханического СП без обратной связи.
Ступенчатый единичный входной сигнал такой сервопривод отработает как интегрирующее звено с запаздыванием (рис.5.9,а, кривая 2).
Рассмотрим модель электрогидравлического сервопривода с жесткой обратной связью, когда в цепи обратной связи стоит усилительное звено Wжос(p) = kжос (рис 5.10,a). Тогда передаточная функция такого сервопривода
xпрэ |
(t) = |
|
1 |
[uвх (t) − xпрэ (t)] , (5.13) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Tрм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где xпрэ - координата, |
характеризующая подвод электрической |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
энергии: kрм , Tрм - коэффициент усиления и постоянная времени РМ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Решая уравнения (5.12), (5.13), получим передаточную функцию |
|
|
|
|
Wy (p)Wра (p) |
|
|
|
kэгжос |
|
|
||||||||||||||
РМ |
|
|
|
|
|
|
|
|
|
Wжос(p) = |
|
|
= |
|
|
. (5.18) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
ϕ |
|
|
(p) |
|
kрм |
|
эг |
|
|
1+ W (p)W |
(p)W |
(p) |
|
Tжоср+1 |
|
|||||||
W |
(p) = |
|
вых |
|
= |
|
. (5.14) |
|
|
|
|
y |
|
ра |
жос |
|
|
эг |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
рм |
|
Uвх |
(p) |
|
р(Tрмр+1) |
|
Коэффициент усиления и постоянная времени электрогидравличе- |
||||||||||||||||||
Таким образом, динамика РМ может быть описана динамикой уси- |
ского сервопривода с жесткой обратной связью имеют вид: |
|
|||||||||||||||||||||||
лительного, апериодического и интегрирующих звеньев. Обычно не |
kэгжос = |
1 |
|
, (5.19) |
|
|
|
|
|
|
|
|
|
|
|||||||||||
удается получить достаточно малое запаздывание РМ в силу ограни- |
|
|
kжос |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
ченности характеристик электродвигателя. Поэтому постоянная време- |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
ни РМ составляет Tрм = 0,05-0,1с, ею пренебречь нельзя. |
Tжос |
= |
|
. (5.20) |
|
|
|
|
|
|
|
|
|||||||||||||
Следует иметь в виду, что используемые линейные дифференци- |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
эг |
|
kуkраkжос |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
альные уравнения не учитывают ряд существенных нелинейностей. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Так, для рулевого агрегата в точных расчетах необходимо учитывать |
Ступенчатый единичный входной сигнал такой сервопривод пре- |
||||||||||||||||||||||||
ограничения перемещения выходного штока, создаваемое концевыми |
образует как апериодическое звено |
|
|
|
|
|
|
|
|||||||||||||||||
выключателями, ограничение ускорения выходного штока, создавае- |
|
|
|
|
|
− |
t |
|
|
|
|
|
|
|
|
||||||||||
мые ограничением мощности по давлению; ограничения скорости вы- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
жос |
) . (5.21) |
|
|
|
|
|
||||||||||||||
ходного штока, создаваемое ограничением по расходу жидкости; зону |
xвых (t) = kэгжос(1−e |
Tэг |
|
|
|
|
|
||||||||||||||||||
нечувствительности, создаваемую перекрытием золотника. |
Если |
коэффициент |
усиления |
kу |
достаточно |
велик, |
а kжос=1, |
||||||||||||||||||
Аналогичные нелинейности характерны и для рулевой машины: ограничение перемещения выходного вала, создаваемое концевыми выключателями; ограничение ускорения выходного вала, создаваемое ограничением управляющего тока; ограничение скорости перемещения выходного вала, создаваемое ограничением управляющего напряжения; зона нечувствительности, определяемая напряжением трогания двигателя.
4
В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
Wжос(p) = |
|
|
Wy (p)Wрм(p) |
= |
|||
|
|
|
|
||||
|
эм |
|
1 |
+ Wy (p)Wрм(p)Wжос(p) |
|
||
|
|
|
(5.22) |
||||
|
|
|
|
|
kэмжос |
||
= |
|
|
|
|
|
||
(Tжос)2 |
р2 |
+ 2ξжосTжос +1 |
|
|
|||
|
эм |
|
|
|
эм эм |
|
|
Постоянная времени и коэффициент затухания имеют вид:
Tжос = |
|
|
|
Tрм |
, (5.23) |
|
|
|
|
|
|||
эм |
|
|
kуkрмkжос |
|
|
|
|
|
|
|
|
||
ξэмжос = |
1 |
|
1 |
|
. (5.24) |
|
|
|
|
|
|
||
|
2 |
|
|
Tрмkуkрмkжос |
||
Ступенчатый единичный входной сигнал такой сервопривод отработает как колебательное звено:
|
|
|
|
|
|
1 |
|
−ξэмжосt |
||
ϕвых› (t ) = kэмжос[1− |
|
|
|
e Tэмжос |
|
|||||
|
|
|
|
|
|
|||||
|
|
|
1 |
−(ξжос)2 |
. (5.25) |
|||||
|
|
|
|
|
|
|
эм |
|
|
|
sin( |
1 |
−(ξэмжос)2 |
t +arctg |
1 |
−(ξэмжос)2 |
)] |
||||
|
Tжос |
|
|
Tжос |
||||||
|
|
|
|
|
|
|
|
|||
|
|
эм |
|
|
|
|
|
эм |
|
|
Переходный процесс показан на рис.5.9,в (кривая 4).
Рассмотрим модель электромеханического сервопривода со скоростной обратной связью, когда в цепи обратной связи находится дифференцирующее звено с передаточной функцией Wсос(p) = kсос(p) (рис.5.10,в). Тогда передаточная функция такого сервопривода
Wсос(p) = |
Wу(p)Wрм(p) |
= |
kсосэм |
. (5.26) |
|||
1+W (p)W |
(p)W (p) |
р(Tсосp +1) |
|||||
эм |
|
|
|||||
|
у |
рм |
сос |
|
эм |
|
|
Коэффициент усиления и постоянную времени определяют так:
kсосэм |
= |
kуkрм |
, (5.27) |
|||
1+k |
уkрмkсос |
|||||
|
|
|
|
|||
Tсос = |
|
Tрм |
|
. (5.28) |
||
|
|
|
||||
эм |
|
1+kуkрмkсос |
|
|
||
|
|
|
|
|||
Ступенчатый единичный входной сигнал такой сервопривод отработает почти так же, как и сервопривод без обратной связи. Инерцион-
ность СП уменьшится, так как Tэмсос < Tрм , однако вместе с этим
уменьшится коэффициент усиления kсосэм < kэм (кривая 5, рис.5.9,а).
Рассмотрим модель электромеханического сервопривода, охваченного скоростной и жесткой обратными связями (рис.5.10,г). Передаточная функция такого сервопривода
Wжсос(p) = |
|
|
Wсос(p) |
|
|
|
||||||||
|
|
эм |
|
|
|
|
|
= |
||||||
|
|
|
|
|
|
|
|
|||||||
|
эм |
1 |
+ Wсос(p)W (p) |
|||||||||||
|
|
|
|
|
|
|
|
эм |
|
|
жос |
. (5.29) |
||
|
|
|
|
|
|
|
|
kэмжсос |
|
|
|
|||
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(Tжсос)2 р2 |
+ 2ξжсосTжсос +1 |
|
||||||||||||
|
эм |
|
|
|
|
|
|
эм |
|
эм |
|
|
|
|
Коэффициент усиления, постоянная времени и коэффициент зату- |
||||||||||||||
хания имеют вид: |
|
|
|
|
|
|
|
|||||||
kэмжсос = |
1 |
|
|
|
, (5.30) |
|
|
|
|
|
|
|||
kжос |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||
Tжсос = |
|
|
|
|
|
|
Tрм |
|
=Tжос |
, (5.31) |
||||
|
|
|
|
|
|
|
|
|||||||
эм |
|
1+k |
уkрмkжос |
|
|
эм |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||
ξэмжсос = |
1 |
|
|
|
|
|
1 |
|
|
(1+ kуkсос) = ξэмжсос(1+ kуkсос) |
||||
2 Tрмkуkрмk |
|
|
||||||||||||
|
|
жос |
|
|
|
|||||||||
. |
|
|
|
|
|
|
|
|
|
|
|
(5.32) |
||
Ступенчатый единичный входной сигнал такой сервопривод отработает почти так же, как и электромеханический сервопривод с жесткой обратной связью (5.25). Отличие будет заключаться в большем коэф-
фициенте затухания ξжсосэм > ξжосэм (см. рис.5.9,в, кривая 6).
Рассмотрим модель электромеханического сервопривода, охваченного изодромной обратной связью, передаточная функция которой
Wиос(p) = Tиp /(Tиp +1) (рис.5.10,д). Такая передаточная функция получается при пропускании сигнала через электромеханическую следящую систему с передаточной функцией апериодического звена
W(p) =1/(Tиp +1) с последующим вычитанием из входного сигна-
ла: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Tиp |
|
|
||
uвых = uвх − |
|
|
1 |
|
uвх = |
uвх . |
||||||||||||
(T p +1) |
(T p +1) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
и |
и |
|
|
|
|
||||
Передаточная функция сервопривода с изодромной обратной свя- |
||||||||||||||||||
зью |
|
|
|
|
|
|
|
|
|
|
Wy (p)Wрм(p) |
|
|
|
|
|||
Wиос(p) = |
|
|
|
|
|
|
= |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
эм |
|
|
1+ Wy (p)Wрм(p)Wиос(p) |
|
|
||||||||||||
|
|
|
|
|
|
|
, (5.33) |
|||||||||||
|
1+ Tиp |
|
|
|
|
|
|
1 |
|
|
|
|||||||
= |
|
|
|
|
|
|
|
|
|
|
|
|||||||
T p |
|
(Tиос)2 р2 + 2ξиосTиос |
+1 |
|
|
|||||||||||||
|
и |
|
|
|
эм |
|
|
эм |
эм |
|
|
|
|
|||||
где ξиос, Tиос - |
относительный коэффициент и постоянная вре- |
|||||||||||||||||
|
эм |
|
|
эм |
|
|
|
|
|
|
|
|
||||||
мени затухания. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Если Tи >> Tрм , то |
|
|
|
|
|
|||||||||||||
Tиос |
|
|
Tрм |
=Tжос , (5.34) |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
эм |
k |
уkрм |
эм |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
ξиосэм |
1 |
|
|
|
1 |
|
= ξэмжос . (5.35) |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
2 Tрмkуkрм |
|
|
|
|
|
|||||||||||
Таким образом, в диапазоне частот |
ω <1/ Tи работа СП анало- |
|||||||||||||||||
гична работе СП с жесткой обратной связью, так как |
||||||||||||||||||
Wиос(p) |
|
|
|
|
|
1 |
|
|
|
|
. (5.37) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
эм |
|
|
|
(Tжос)2 р2 + 2ξжосTжос +1 |
|||||||||||||
|
|
|
|
|
|
|
|
|
эм |
|
|
эм |
эм |
|
|
|||
Другими словами, быстрые управляющие воздействия СП с изодромной обратной связью отрабатывает как СП с жесткой обратной связью, а медленные управляющие воздействия – как СП со скоростной обратной связью (рис.5.9,г, кривая 7).
5.3. КИНЕМАТИКА РУЧНОГО И АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ
Кинематика включения в механическую проводку управления рулевых приводов, агрегатов и машин. Существуют два основных способа включения исполнительный устройств автоматики в проводку системы управления: последовательный и параллельный. При последовательном способе включения отклонения рулевой поверхности по командам ручного и автоматического управления суммируются, и обеспечивается возможность автоматизированного управления самолетом. При параллельном способе включения управление рулевой поверхностью осуществляется либо пилотом от рычага управления, либо автоматикой. Возможность их совместного управления исключается.
Последовательный способ включения реализуется двумя распространенными схемами: через раздвижную тягу и через дифференциальную качалку. Кинематическая схема последовательного включения исполнительного устройства автоматики в проводку управления через раздвижную тягу представлена на рис.5.11,а. В данном случае исполнительным устройством автоматики служит электрогидравлический комбинированный агрегат управления КАУ, имеющий раздвижную тягу, жестко включенную в проводку управления. В режиме ручного управления длина раздвижной тяги неизменна и воздействие пилота на рулевую поверхность путем отклонения рычага управления ничем не отличается от воздействия в обычной бустерной системе без автоматики.
Выдвижение штока рулевого привода lрп прямо пропорционально отклонению колонки штурвала ∆xв. В свою очередь, отклонение руля
высоты ∆δвру пропорционально выдвижению штока lпр (рис.5.11,б). В режиме автоматического управления меняется длина раздвижной тяги КАУ на величину ∆lарт , пропорциональную управляющему сигналу
автоматики uв (рис.5.11,в). При этом конец раздвижной тяги, соединенный с проводкой управления и рычагом управления, остается неподвижным, следовательно, неподвижным остается рычаг управления. Изменение длины раздвижной тяги влияет на кинематику проводки
5 |
май 2003г. |
Глава 5. АВТОМАТИЗИРОВАННОЕ УПРАВЛЕНИЕ РУЛЯМИ
управления рулевого привода. Выдвижение штока рулевого привода lрп пропорционально сигналу автоматики uв и приводит к отклонению руля
высоты на угол ∆δав . Таким образом, обеспечивается независимость
ручного и автоматического управления и возможность совместной работы пилота и автоматики. Рычаги управления при работе автоматики остаются неподвижными, а информация о наличии усилий в проводке управления в результате работы КАУ выдается пилоту на индикатор.
неизменной и колонка штурвала неподвижной. Информация о наличии усилий в проводке выдается на индикатор. Таким образом, обеспечивается независимость ручного и автоматического управления и возможность совместной работы пилота и автоматики.
|
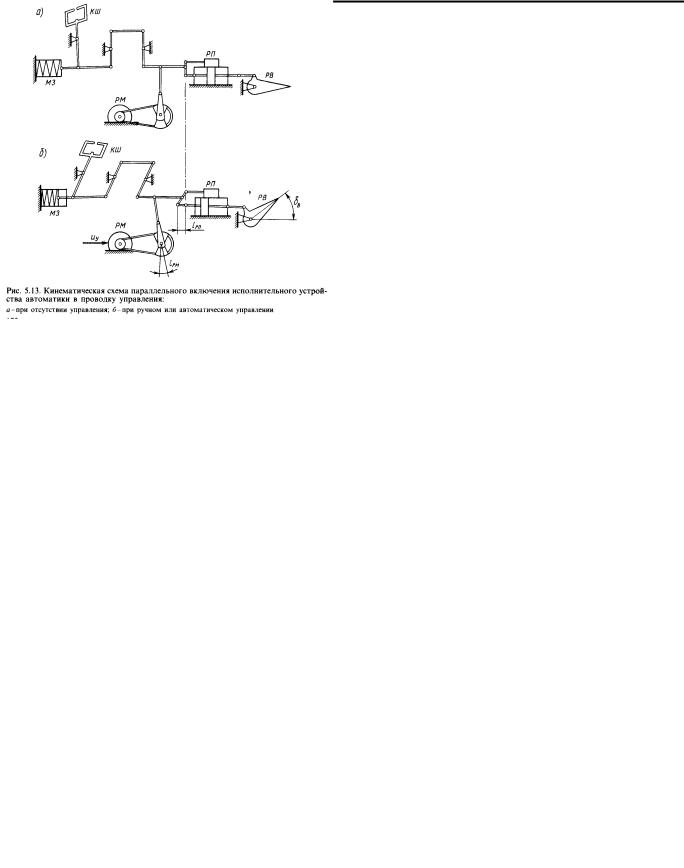
В кинематической схеме параллельного включения исполнительно- |
||||
|
го устройства автоматики в проводку управления (рис.5.13,а). Исполни- |
||||
|
тельным устройством автоматики служит электромеханическая рулевая |
||||
В кинематической схеме последовательного включения исполни- |
машина РМ, сопряженная с проводкой через тросовую передачу и ка- |
||||
тельного устройства автоматики в проводку управления через диффе- |
чающийся сектор. В режиме ручного управления отклонение пилотом |
||||
ренциальную качалку (рис.5.12,а) исполнительным устройством авто- |
колонки штурвала на величину ∆xв вызывает смещение штока силового |
||||
матики служит электрогидравлический рулевой агрегат РА, сопряжен- |
механизма рулевого привода РП на величину lрп (рис.5.13,б). Это при- |
||||
ный своим штоком силового механизма с дифференциальной качалкой |
водит к отклонению руля |
высоты РВ на |
угол |
∆δру |
. Смещение |
(ДК). В режиме ручного управления (рис.5.12,б) отклонение пилотом |
|
|
|
в |
|
колонки штурвала КШ на величину ∆xв вызывает смещение дифферен- |
механической проводки через качающийся сектор и тросовую передачу |
||||
циальной качалки и выдвижение штока силового механизма рулевого |
вызывает поворот вала рулевой машины РМ в положение, согласован- |
||||
привода РП на величину lрп, что, в свою очередь, приводит к отклоне- |
ное с положением рычага управления. |
|
|
|
|
нию руля высоты на угол ∆δвру . Шток силового механизма рулевого |
В режиме автоматического управления при поступлении электри- |
||||
ческого управляющего сигнала автоматики uв вал рулевой машины |
|||||
агрегата РА при этом остается неподвижным. |
поворачивается на угол ∆ϕ, увлекая за собой через тросовую передачу |
||||
|
качающийся сектор и всю механическую проводку управления. При |
||||
|
этом происходит смещение штока силового механизма РП и отклоне- |
||||
|
ние руля высоты на угол |
∆δва . Это движение передается на рычаг |
|||
|
управления, который занимает положение, согласованное с положени- |
||||
|
ем вала рулевой машины. Таким образом, данная схема предусматрива- |
||||
|
ет возможность раздельного управления самолетом либо пилотом, либо |
||||
|
автоматикой. Совместная работа исключается. |
|
|
|
|
|
Кинематика сопряжения ручного и автоматического управле- |
||||
|
ния. Режимы ручного и автоматического управления в полете, как |
||||
|
правило, чередуются. Смена режимов должна происходить плавно, без |
||||
|
рывков рулевых поверхностей и изменения положения самолета отно- |
||||
|
сительно центра масс. Для обеспечения этого требования должны быть |
||||
|
предусмотрены соответствующие схемы сопряжения ручного и автома- |
||||
|
тического управления. Задача решается с помощью специальных элек- |
||||
|
трических схем согласования автоматики (см. 9.1) и с помощью допол- |
||||
|
нительных исполнительных устройств, воздействующих на кинематику |
||||
|
механической проводки управления. Рассмотрим работу схем сопряже- |
||||
|
ния ручного и автоматического управления с помощью дополнитель- |
||||
|
ных исполнительных устройств автоматики. |
|
|
|
|
|
Ручное и автоматическое управление сводится к созданию управ- |
||||
|
ляющего воздействия на входе рулевого привода. Как правило, это |
||||
|
воздействие включает две составляющих: быструю и медленную. Бы- |
||||
|
строе воздействие осуществляется пилотом или автоматикой при пари- |
||||
|
ровании внешних возмущений или создании управлений для целена- |
||||
В режиме автоматического управления (рис.5.12,в) при поступле- |
правленного изменения траектории. Медленное воздействие обуслов- |
||||
лено необходимостью балансировки самолета или триммирования уси- |
|||||
нии электрического управляющего сигнала автоматики uв шток силово- |
лий на рычагах управления. Пилот осуществляет переход с ручного |
||||
го механизма рулевого агрегата РА смещается на величину lра увлекая |
режима управления на автоматический в установившемся полете, пред- |
||||
за собой дифференциальную качалку. Через механическую проводку |
варительно стриммировав усилия на рычагах управления таким обра- |
||||
выдвигается шток силового механизма рулевого привода РП на вели- |
зом, чтобы балансировочному положению рулей соответствовало ней- |
||||
чину lрп, что в свою очередь, приводит к отклонению руля высоты на |
тральное положение механизма загрузки, что обеспечивает отсутствие |
||||
угол ∆δва . Кинематика проводки рычага управления при этом остается |
усилий на рычагах управления. Поэтому при переходе от ручного к |
||||
|
автоматическому управлению необходимо |
установить |
нейтральное |
||
|
|
|
|
||
6 |
|
|
май 2003г. |
||
В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
положение выходных штоков и валов исполнительных устройств автоматики в момент их электрического подключения. В то же время, при переходе с автоматического управления на ручное необходимо чтобы положение рычагов управления в полностью соответствовало отклонению рулей. При последовательном и параллельном включении исполнительных устройств автоматики в проводку управления рулями эти задачи решаются по-разному.
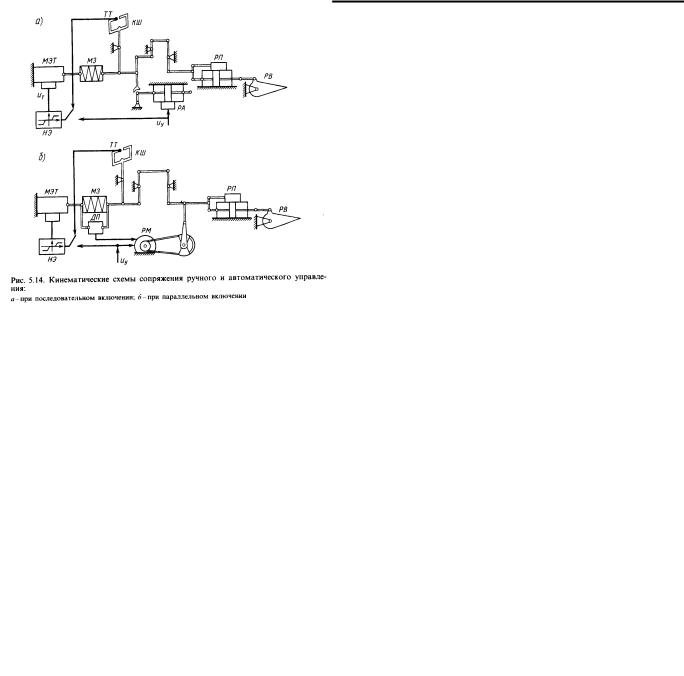
При последовательном включении большое распространение получила схема "перекачки" медленной составляющей управляющего сигнала автоматики в тракт ручного управления (рис.5.14,а). Дополнительное исполнительное устройство автоматики - электромеханизм триммирования (МЭТ) воздействует на механизм загрузки, отклоняя рычаг управления при поступлении на него электрических сигналов. В ручном режиме электрический сигнал формируется пилотом путем нажатия тангенты управления механизмом МЭТ, находящейся на штурвале.
В автоматическом режиме электрический сигнал формируется автоматикой, которая выделяет медленную составляющую управляющего сигнала для воздействия на руль через МЭТ. В результате балансировочное положение руля обеспечивается через тракт ручного управления, а быстрые управляющие воздействия автоматики формируются основным исполнительным устройством - рулевым агрегатом относительно нейтрального положения его штока. Положение рычага управления при этом соответствует балансировочному положению руля и переход с автоматического режима управления на ручной происходит плавно. Обратный переход с ручного управления на автоматическое в данной схеме не требует никакой предварительной подготовки, так как в ручном режиме выходной шток РА остается неподвижным относительно нейтрального положения и это положение не зависит от положения рычагов управления и рулей.
При параллельном включении ручное и автоматическое воздействия передаются на рули по одному и тому же тракту. Рассмотрим схему сопряжения с "плавающий" обратной связью (рис.5.14,б). Эта связь вводится по перемещению механизма загрузки, измеряемого датчиком положения ДП, таким образом, чтобы нулевому сигналу на входе рулевой машины соответствовало нейтральное состояние пружины. Это обеспечивает безударное включение автоматического управления, если к моменту включения пилот стриммировал в ручном режиме усилие на рычаге управления.
Если в процессе автоматического управления балансировочное положение самолета меняется, то работает схема "перекачки", рассмотренная выше. Это приводит к медленной деформации пружины, снятию усилий и изменению сигнала "плавающей" обратной связи. Так как положение руля не должно изменяться, то управляющий сигнал на рулевой машине приводится в соответствие с изменившимся сигналом обратной связи, а автоматика воспринимает дрейф сигнала обратной связи как возмущение и парирует его. В результате "средняя" составляющая управляющего сигнала автоматики стремится к нулю, и в момент отключения автоматики пружина поставит руль в балансировочное положение. Это обеспечивает мягкое сопряжение ручного и автоматического режимов управления.
7 |
май 2003г. |

В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
Г л а в а 6.
ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ
Если самолет обладает неудовлетворительными характеристиками демпфирования и устойчивости, возникает задача улучшения этих характеристик с помощью соответствующих автоматических средств. Автоматическое демпфирование колебаний самолета осуществляется путем отклонения рулей средствами автоматического управления при изменении параметров короткопериодического движения самолета. Благоприятное влияние автоматики на характеристики демпфирования и устойчивости проявляется в улучшении качества переходных процессов возвращения самолета к исходному режиму по перегрузкам и угловым скоростям после непроизвольного отклонения под действием внешних возмущений, а также переходных процессов выхода самолета на новый режим полета после целенаправленного воздействия пилота на рычаги управления.
В качестве средств автоматического демпфирования самолета применяются автоматы демпфирования, среди которых различают демпферы тангажа, крена и рыскания. Их общая особенность - автоматическое отклонение руля при возникновении угловой скорости вращения самолета относительно соответствующей связанной оси.
Разделение средств автоматического демпфирования и улучшения устойчивости самолета на автоматы демпфирования и устойчивости является достаточно условным, так как демпфирование и устойчивость являются взаимосвязанными свойствами самолета.
Кроме того, на современных самолетах автоматы демпфирования и устойчивости комплексируются в единой системе и работают одновременно и согласованно. Однако с методической точки зрения изучение средств автоматического демпфирования и улучшения устойчивости самолета целесообразно начать с изучения простейших автоматов демпфирования и устойчивости.
6.1. АВТОМАТИЧЕСКОЕ ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ ПО ТАНГАЖУ
6.1.1. Демпферы тангажа
Устройство и работа. Необходимость демпфирования продольных короткопериодических колебаний самолета возникает при недостаточной степени его продольной статической устойчивости по перегрузке и сильно выраженной колебательности переходных процессов при возвращении самолета к исходному режиму по нормальной перегрузке после непроизвольного отклонения под действием внешнего момента тангажа или вертикального ветра. Чтобы решить эту задачу, пилот, наблюдая за изменением угла тангажа по прибору, воздействует на колонку штурвала и отклоняет руль высоты таким образом, чтобы колебания самолета по тангажу прекратились. Для освобождения пилота от ручного демпфирования продольных коротко периодических колебаний самолета служат демпферы тангажа.
Демпфер тангажа (ДТ) - средство автоматического управления, обеспечивающее демпфирование продольных короткопериодических колебаний самолета на всех этапах полета путем отклонения руля высоты при возникновении угловой скорости тангажа.
Простейший демпфер тангажа реализует следующий закон управления рулем высоты
∆δвДТ = kωz ωz , (6.1)
где ∆δвДТ - автоматическое отклонение руля высоты от баланси-
ровочного положения демпфером тангажа; kωz - передаточный коэф-
фициент по угловой скорости тангажа, показывающий на какой угол должен отклониться руль высоты при изменении угловой скорости на 1 град/с (рад/с).
Демпферы тангажа устанавливаются на самолеты с бустерной или электродистанционной системами управления рулем высоты. Это позволяет обеспечить последовательную схему включения исполнительного устройства демпфера в механическую проводку руля высоты. При совместном управлении самолетом пилотом и демпфером тангажа
общее отклонение руля высоты от балансировочного положения ∆δв равно алгебраической сумме ручного отклонения пилотом колонки штурвала ∆δвР и автоматического отклонения демпфером тангажа
∆δв = ∆δвР +∆δвДТ . (6.2)
Функциональная схема аналогового демпфера тангажа представлена на рис 6.1. В состав демпфера тангажа входят датчик угловой скорости тангажа ДУС, вычислитель В, и сервопривод руля высоты СПδв. Сервопривод включает сумматор С, усилитель У, исполнительный механизм ИМ, и датчик обратной связи ДОС. Сервопривод охватывается жесткой обратной связью. В качестве исполнительного механизма служит электропривод, который вместе с датчиком ДОС образует рулевой агрегат РА. Датчик ДУС помещается в блок демпфирующих гироскопов БДГ. Вычислительное устройство вместе с электронной частью сервопривода, сумматором и усилителем образуют электронный блок демпфера БД, в канале руля высоты.
Демпфер тангажа работает следующим образом. При возникновении угловой скорости тангажа датчик ДУС вырабатывает сигнал uωz ,
пропорциональный этой скорости. Сигнал подается в вычислитель, который в соответствии с законом управления (6.1) вырабатывает управляющий сигнал uв на вход сумматора сервопривода. Сервопривод преобразует этот сигнал в перемещение штока рулевого агрегата
∆δвДТ . Одновременно с датчика обратной связи снимается электриче-
ский сигнал обратной связи uос пропорциональный перемещению штока рулевого агрегата. Как только сигналы uос и uв уравновесят друг друга на входе сумматора сервопривода, отработка руля высоты рулевым агрегатом прекращается и руль остановится в некотором положении, пропорциональном возникшей угловой скорости ωz. Отклонение руля высоты вызовет появление управляющего аэродинамического момента
Мzδв , противоположного по знаку возмущению, приведшему к появ-
лению угловой скорости ωz. Поэтому угловая скорость ωz начнет уменьшаться, а вместе с ней и сигнал uωz с датчика ДУС. Когда угло-
вая скорость ωz станет равной нулю, и uв=0, то под действием сигнала обратной связи uос сервопривод возвратит руль высоты обратно в балансировочное положение. Таким образом, колебательность продольного движения будет погашена.
Отклонение руля высоты ∆δвР создается пилотом путем переме-
щения колонки штурвала КШ на величину ∆xв от балансировочного положения. Посредством дифференциальной качалки осуществляется взаимодействие демпфера тангажа с системой управления рулем высоты (СУП РВ) согласно (6.2). Через рулевой привод РПδв формируется отклонение руля ∆δв.
Влияние демпферов тангажа на характеристики продольной устойчивости и управляемости. Покажем, что с помощью демпфера тангажа повышается степень продольной устойчивости по перегрузке. При отклонении руля высоты демпфером появляется приращение коэффициента момента тангажа
∆mz = mδzв ∆δвДТ = mδzв kωz ωz = ∆mωz z ωz , (6.3)
где ∆mωz |
= mδв k |
ω |
V b |
a |
, а ω |
z |
определяется выражением |
z |
z |
z |
|
|
|||
|
|
|
|
|
|
|
(3.31).
Тогда степень продольной статической устойчивости по перегрузке самолета, управляемого демпфером тангажа σпДТ , определяется, согласно (3.30), следующим образом
dmR |
z |
|
c |
mωz |
|
mδzв kω |
V |
|
||
σпДТ = |
|
|
|
= mzy + |
z |
+ |
z |
|
= σп +∆σпДТ . |
|
dcy |
|
|
µ |
µba |
|
|||||
|
а |
|
|
|
|
|
|
|||
|
|
|
V=const |
|
|
|
|
|
(6.4) |
|
|
|
|
|
|
|
|
|
|
|
|
9 |
май 2003г. |

Глава 6. ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ САМОЛЕТА
Так как mδzв < 0 , то приращение степени продольной статической
устойчивости по перегрузке за счет использования демпфера тангажа σпДТ < 0 . Следовательно
σпДТ > σп , (6.5)
что доказывает повышение статической устойчивости продольного движения.
Покажем, что с помощью демпфера тангажа улучшается динамическая устойчивость продольного движения. Типичный вид переходного процесса, возникшего в результате кратковременного внешнего возмущения, показан на рис 6.2а. Этот процесс характеризуется периодом собственных продольных короткопериодических колебаний Тк и вре-
менем затухания tкзат . На рис 6.2б показан переходной процесс при наличии на самолете демпфера тангажа.
(∆mωz z )ДТ = −32, 4; |
σпДТ = −0, 414, |
|||||
(Xny ) |
|
=100 мм, (Pny |
|
|
. |
|
ДТ |
) |
ДТ |
=160 H |
|||
в |
|
в |
|
|
||
Таким образом, демпфер тангажа повысил степень продольной статической устойчивости в начале полета с – 0,408 до – 0,488 и в конце полета с –0,334 до –0,414. Однако при этом увеличился градиент перемещения в начале полета с -231 мм до -277 мм, и с -81 мм в конце полета до -100 мм и аналогично увеличится градиент усилия с 318 Н до 372 Н в начале полета и с 137 Н до 160 Н в конце полета.
Особенности законов управления. Разновидностью законов управления демпферов тангажа является закон управления
∆δвДТ = kωz ωz = kωz pωz . (6.6)
Закон управления (6.6) использует в качестве управляющего параметра производную угловой скорости тангажа ωz = pωz (р - оператор
дифференцирования Лапласа), то есть угловое ускорение. Так как физические датчики угловых ускорений не получили распространения, этот сигнал получают дифференцированием внутри ДУС сигнала ωz. Тогда передаточный коэффициент по угловому ускорению тангажа
kωz показывает, на какой угол должен отклониться руль высоты при
изменении углового ускорения тангажа на 1град/с2 (1 рад/с2). Разновидностью закона управления (6.6) является следующий закон
∆δДТ = k |
|
Tωz p |
|
ω . (6.7) |
|||
ωz T |
p +1 |
||||||
в |
|
z |
|||||
|
|
ω |
z |
|
|
||
|
|
|
|
|
|||
Изодромный фильтр Tω |
p (Tω p +1) реализуется в вычислителе |
||||||
|
|
|
|
|
z |
z |
|
блока демпфера. В аналоговых демпферах это осуществляется с помощью RC - цепочки. Структурная схема демпфера тангажа с законом управления (6.7) представлена на рис 6.4.
Как видно из графика, характеристики динамической устойчивости самолета с демпфером тангажа TкДТ и ( tкзат )ДT лучше, чем у самолета
без демпфера. То есть демпфер тангажа позволяет снизить колебательность продольного короткопериодического движения самолета и уменьшить длительность переходных процессов.
На рис 6.3 показан переходный процесс, возникающий в результате ступенчатого отклонения пилотом руля высоты на угол ∆δвР . Как
видно из графиков, демпфер тангажа делает переходные процессы по угловой скорости тангажа ωz и углу тангажа ∆ϑ почти плавными. Одна-
ко, так как отклонение руля высоты демпфером ∆δвДТ вычитается из
отклонения руля высоты пилотом ∆δвР , общее отклонение руля высоты
становится меньше. То есть эффективность управления рулем высоты от колонки штурвала уменьшается, что приводит к уменьшению уста-
новившегося значения (ωДТz )уст по сравнению с управлением без
демпфера тангажа. Соответственно менее интенсивно растет угол тангажа ∆ϑ. Это является основным недостатком демпфера тангажа с законом управления (6.1).
Для создания угловой скорости (ωz )уст пилот прикладывает большие усилия и дает большие перемещения колонки штурвала, ком-
пенсируя увеличение демпфером тангажа градиентов усилий (Pвny )ДТ
и перемещений (Xвny )ДТ .
Пример 6.1. Рассчитаем характеристики устойчивости и управляемости самолета с демпфером тангажа для примеров 3.1 и 3.2.
В начале полета
(∆mωz z )ДТ = mδzв kω V ba =16,3; |
kω |
=1; |
|||||
|
|
|
z |
|
|
z |
|
ДТ |
|
|
ω |
µ = 0, 488; |
ny |
= −31°; |
|
σп |
= σп + (∆mz z )ДТ |
δв |
|||||
(Xny ) |
ДТ |
= −277 мм, |
(Pny ) |
ДТ |
= 372 |
H |
|
в |
|
|
в |
|
|
||
В конце полета
Законы управления демпферов тангажа (6.6) и (6.7) позволяют при достижении самолетом установившегося значения угловой скорости
(ωДТz )уст , возвращать шток рулевого агрегата в нейтральное положе-
ние, когда (ωДТz )уст p . Противодействие демпфера пилоту прекраща-
ется, и расход перемещения колонки штурвала для создания угловой скорости не изменяется.
Влияние отказов и характеристик элементов демпфера тангажа на управление продольным движением. Отказы в средствах автома-
тического управления полетом принято классифицировать на пассивные и активные. Пассивные отказы не приводят к перекладкам рулей и их воздействие аналогично выключению автоматического средства из процесса управления полетом, активные отказы приводят к перекладкам рулей и непосредственным образом влияют на динамику управления полетом. Пассивный отказ демпфера тангажа, сопровождающийся возвращением штока рулевого агрегата в нейтральное положение, приводит к тому, что эффективность демпфирования продольных короткопериодических колебаний резко падает, а эффективность управления самолетом от колонки штурвала возрастает. Пилот, пытаясь воздействием на колонку штурвала демпфировать колебания, может непроизвольно ввести самолет в "раскачку".
Активный отказ демпфера тангажа, сопровождающийся отработкой штока рулевого агрегата на максимальный ход, приводит к выводу самолета на недопустимые нормальные перегрузки. Если такой отказ происходит в условиях вертикального маневра, он может привести к перекладке штока рулевого агрегата из одного крайнего положения в другое и удвоению изменения перегрузки. Одним из активных отказов является обрыв цепи обратной связи в сервоприводе. Так как коэффи-
10 |
май 2003г. |

В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
циент усиления сервопривода с жесткой обратной связью обратно |
|
Переходная матрица состояния продольного короткопериодическо- |
|||||||||||||||||||||||
пропорционален |
величине |
коэффициента |
обратной |
связи |
го движения самолета при включенном демпфере тангажа |
|
|
||||||||||||||||||
kспжос =1/ kос , |
при обрыве |
обратной связи коэффициент |
усиления |
|
ФпкДТ (p) = (Ip − Aпк −Bпку DпкДТ)−1 = (φпк (p))−1 . (6.16) |
||||||||||||||||||||
сервопривода возрастает до значительной величины, равной произведе- |
|
Элементами вектора |
WДТ |
(p) являются передаточные функции |
|||||||||||||||||||||
нию коэффициентов усиления усилителя и рулевого агрегата kс=kраkу. В |
|
|
|
|
|
|
|
|
|
|
|
пк |
|
|
|
|
∆Χв(p) . |
|
|
||||||
результате контур автоматического управления может потерять устой- |
самолета на управляющие воздействия пилота |
Соответст- |
|||||||||||||||||||||||
чивость. |
|
|
|
|
вующие параметры вектора выхода Yпк(p) |
совпадают в рассматри- |
|||||||||||||||||||
Из соображений безопасности автоматического управления поле- |
|||||||||||||||||||||||||
том отклонение руля высоты демпфером тангажа обычно ограничивает- |
ваемом случае с вектором переменных состояния продольного корот- |
||||||||||||||||||||||||
ся определенными пределами за счет ограничения хода штока рулевого |
копериодического движения Xпк(p) : |
|
|
|
|
|
|
|
|
||||||||||||||||
агрегата. Это приводит к тому, что при достаточно больших возмуще- |
|
|
ДТ |
|
T |
|
∆x |
|
|
(p) |
∆xв |
|
|
∆xв |
(p) ] . (6.17) |
||||||||||
ниях эффективность демпфера тангажа в демпфировании колебаний |
|
|
|
|
в |
|
|
||||||||||||||||||
|
[Wпк |
(p)] |
=[W∆ω |
z |
W∆α |
(p) W∆ϑ |
|||||||||||||||||||
снижается. Наиболее заметно |
ограничение хода штока рулевого агре- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Переходная матрица состояния |
|
|
|
|
|
|
|
|
||||||||||||||||
гата сказывается при вертикальном маневре, так как за счет постоянной |
|
|
|
|
|
|
|
|
|
||||||||||||||||
составляющей угловой скорости расходуется часть рабочей зоны от- |
|
ФпкДТ (p) = |
{φпк(p)} |
пр |
|
|
|
|
|
|
|
|
|
|
|||||||||||
клонения руля высоты демпфером. Нелинейность статических характе- |
|
. (6.18) |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
φпк(p) |
|
|
|
|
|
|
|
|
|
||||||||||||||
ристик демпфера тангажа может существенно влиять на управление |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
продольным движением. Так, ограничение по скорости перемещения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Присоединенная матрица имеет вид: |
|
|
|
|
|
|
|
|||||||||||||||||
штока рулевого агрегата может сделать неэффективным увеличение |
{φ |
|
|
|
|
|
|
|
|||||||||||||||||
передаточного коэффициента |
демпфера, так как |
сервопривод будет |
пк |
(p)} |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
быстро выходить на режим насыщения по скорости. Нелинейности |
|
пр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
характеристик ограничивают возможность расширения полосы пропус- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
кания сервопривода, зависящей от коэффициента обратной связи. При |
|
p(p −aα,α ) |
|
paα,ω |
|
|
|
|
|
0 |
|
|
|
||||||||||||
большом коэффициенте усиления в контуре сервопривода могут возни- |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
кать автоколебания низкой частоты. |
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
. |
||
скорости тангажа с |
|
|
|
|
|
|
p(p −aω ,ω − |
|
|
|
|
|
|
|
|||||||||||
Широкополосная помеха |
в сигнале угловой |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
датчика ДУС может быть обусловлена вибрацией и изгибными колеба- |
|
|
paα,ω |
|
|
|
|
|
|
|
z |
z |
|
|
|
|
0 |
|
|
|
|||||
|
|
z |
|
−aϑ,ωz kωz |
) |
|
|
|
|
|
|
|
|||||||||||||
ниями конструкции самолета. При расширении полосы пропускания |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
(p −aα,α )(p −aω |
|
|
||||||||||||||||
сервопривода такая помеха способна вызвать, так называемый, "авто- |
|
|
|
|
|
|
|
|
|
|
|
|
|
,ω |
− |
||||||||||
пилотный флаттер" рулевых поверхностей. |
|
|
aϑ, |
ω (p −aα,α ) |
aω αaϑ,ω |
|
|
|
|
|
z |
z |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
В аналоговых средствах автоматического управления одним из ос- |
|
|
z |
|
|
|
|
z, |
|
|
z |
−a |
|
k |
ωz |
) −a |
|
a |
|
||||||
новных факторов, влияющих на эффективность их эксплуатации, явля- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωz ,δв |
|
α,ωz |
ωz ,α |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ется "дрейф нулей" датчиков и разрегулировки передаточных коэффициентов.
6.1.2. Моделирование демпфирования колебаний по тангажу
Реакция самолета на управляющие воздействия пилота при включенном демпфере тангажа. Рассмотрим модель продольного короткопериодического движения самолета (3.19), управляемого пилотом и демпфером тангажа с законом управления (6.1). Модель содержит уравнение состояния, уравнение выхода и входа, а так же законы управления демпфера тангажа и системы управления полетом:
xпк (t) = Aпкxпк(t) + Bпку uпку (t) , (6.8)
yпк (t) = xпк(t) , (6.9)
uпку (t) = ∆δвр(t) +∆δвДТ(t) , (6.10)
∆δвр(t) = Dпкр ∆xв(t) , (6.11)
∆δвДТ(t) = DпкДТyпк(t) . (6.12)
Составляющими модели являются:
|
∆ω (t) |
aω ,ω |
aω ,α |
|||
|
z |
|
|
|
z z |
z |
|
, Aпк = a |
|
aα,α |
|||
xпк(t) = |
∆α(t) |
α,ωz |
||||
|
|
|
|
a |
|
0 |
|
∆ϑ(t) |
|
z |
|||
|
|
|
|
|
ϑ,ω |
|
0 |
aω ,δ |
|
|
|
|
z |
в |
0 , Впку |
= |
0 |
|
|
|
0 |
|
0 |
|
|
|
|
|
|
|
Dпкр = kш.в, DпкДТ =[ kω |
0 0] . (6.13) |
|
z |
Подставим уравнения выхода (6.9) и входа (6.10), а также законы управления (6.11), (6.12) в уравнение состояния (6.8) и возьмем преобразование Лапласа при нулевых начальных условиях:
(Ip − Aпк −Bпку DпкДТ)Yпк(p) = Bпку Dпкp ∆Χв(p) . (6.14)
Получаем вектор передаточных функций замкнутой системы "самолет - демпфер тангажа" в продольном короткопериодическом движении самолета по угловой скорости тангажа, углам атаки и тангажа на отклонение пилотом колонки штурвала при включенном демпфере тангажа:
WДТ (p) = |
Yпк(p) |
= |
|
||
пк |
∆Χв(p) |
. (6.15) |
|
= (Ip − Aпк −Bпку DпкДТ )−1Bпку Dпкp = ФпкДТ (p)Bпку Dпкp
|
|
(p −aω ,ω |
−a |
ω ,δ |
kω |
) |
−aω ,α |
0 |
|
|
|
|
z |
|
z |
z в |
|
z |
z |
|
|
φпк(p) |
= |
|
−aα,ω |
|
|
|
(p −aα,α ) |
0 |
= |
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
−aϑ,ω |
|
|
|
0 |
p |
|
|
|
|
|
|
z |
|
|
|
|
|
|
= p[p2 + 2hкДТp + (ωкДТ )2 ] = ∆ДТ (p) . (6.20)
Коэффициент демпфирования и частота продольных короткопериодических колебаний самолета, управляемого демпфером тангажа, имеют вид:
hкДТ = − |
|
1 |
|
(aω ,ω + aα,α + aω ,δ kω ) = |
|
|
|
|||||||||||||||||||||||||||||||||||
2 |
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
в |
|
z |
, (6.21) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωz |
|
|
|
|
|
|
δв |
|
|
|
|
|
|
|
|
||||||
= |
|
|
α |
|
− |
|
α |
|
− |
|
|
|
|
− |
|
|
|
k |
|
|
|
] |
|
|
|
|
|
|||||||||||||||
[F |
|
M |
|
M |
|
M |
ω |
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
2 |
|
|
y |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
к |
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
z |
|
|
|
|
|
|
z |
|
|
z |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
[ωДТ ]2 |
|
= a |
ω |
,ω |
a |
α,α |
−a |
α,ω |
a |
ω |
,α |
+ |
|
|
|
|
|
|||||||||||||||||||||||||
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
. (6.22) |
|
+a |
|
|
|
a |
|
|
|
|
|
|
k |
|
|
= |
|
|
α |
|
+ |
|
|
ωz |
|
|
α |
+ |
|
δв |
k |
|||||||||||||
α,α |
ω ,δ |
|
ω |
M |
|
M |
F |
M |
ω |
|||||||||||||||||||||||||||||||||
|
|
|
|
в |
|
|
|
|
|
R |
z |
|
|
|
|
|
R |
z |
y |
к |
|
|
R |
z |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
z |
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
||||||||||
Тогда переходная матрица состояния:
ФпкДТ (p) =
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
(p −aα,α ) |
|
|
|
|
|||
|
|
|
|||
|
∆ДТ (p) |
|
|||
|
|
|
|
|
|
|
|
p |
|
|
aα,ω |
|
|
|
|
|
|
|
∆ДТ |
(p) |
|||
|
|
z |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
aϑ,ω |
|
(p −aα,α ) |
||
|
|
z |
|
||
|
|
|
|||
|
∆ДТ (p) |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
aω |
,α |
|
|||
|
|
|
|
|
|
|
|
|||
|
|
∆ДТ (p) |
z |
|
|
|||||
|
p |
|
(p −a |
ω ,ω |
− |
|||||
∆ДТ |
|
|||||||||
(p) |
|
|
|
z |
z |
|||||
−aω |
,ϑkω |
) |
|
|
|
|
||||
|
|
z |
|
|
|
z |
|
|
|
|
|
1 |
|
|
aϑ,ω |
aω |
,α |
||||
|
∆ДТ(p) |
|||||||||
|
|
z |
|
z |
|
|||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
[(p −aα,α ) |
|
||
|
|||
(p −aω |
,ω − |
|
|
|
z |
z |
|
−aω |
|
−aω |
|
,ω |
,α )]/ p |
||
z |
z |
z |
|
. (6.23)
Вектор передаточных функций замкнутой системы "самолетдемпфер тангажа"
11 |
май 2003г. |

Глава 6. ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ САМОЛЕТА
|
|
|
|
|
|
p |
|
|
kш.вaω ,δ |
(p −aα,α ) |
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
∆ДТ |
|
|
||||||||||||
|
|
|
|
(p) |
|
|
z |
|
в |
|
|
|
|||||
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
WДТ (p) = |
|
|
|
|
|
|
k |
|
a |
|
|
a |
|
. (6.24) |
|||
|
|
|
|
∆ДТ(p) |
|
|
|
|
|||||||||
пк |
|
|
|
|
|
|
ш.в |
|
ωz ,δв |
|
α,ωz |
|
|||||
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kш.вaω ,δ |
aϑ,ω |
(p −aα,α ) |
||||||||
|
|
ДТ |
|
|
|
||||||||||||
|
|
∆ |
(p) |
|
z |
в |
|
z |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Введем следующие обозначения: |
|
|
|
||||||||||||||
TДТ |
, ξДТ |
- время и относительный коэффициент демпфирования |
|||||||||||||||
α |
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
продольных короткопериодических колебаний самолета, управляемого демпфером тангажа,
kωδвДТ , kωδвДТ,α - коэффициенты |
усиления самолета, |
управляемого |
||||||||||||||||||||
|
z |
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
демпфером тангажа: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
(TДТ)2 |
= |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
α |
|
|
aω ,ω aα,α −aα,ω |
aω |
,α + aα,αaω |
,δ |
kω |
||||||||||||||
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
z |
z |
|
|
|
z |
|
z |
|
z |
|
|
в |
z |
||
= |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
= |
Tα |
|
|
|
|
(6.25) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
α |
|
|
|
ω |
|
α |
|
|
δ |
в |
|
|
δ |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
z |
Fyк |
|
|
|
|
|
1+ kω |
|
|
|
|
|
|||
|
MRz + MRz |
+ MRz kωz |
|
|
kωв |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
z |
|
|
|
|
|
|
|
ξαДТ = |
1 |
|
(aω |
,ω |
+aα,α + aω |
,δ |
kω |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
z |
|
z |
|
|
|
|
|
|
|
|
z |
в |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
aω ,ω aα,α −aα,ω aω ,α + aα,αaω ,δ |
kω |
= |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
z |
z |
|
|
|
|
|
|
z |
|
z |
|
|
|
|
|
|
z |
|
в |
z |
|
|
|
|
|
|
|
|
|
|
|||||
= |
1 |
|
|
α |
− |
|
α |
+ |
|
ωz |
− |
|
δв |
k |
|
) |
|
α |
|
+ |
|
ωz |
|
α |
+ |
|
δв |
k |
|
= |
|||||||||||
(F |
M |
M |
M |
ω |
M |
|
M |
F |
M |
ω |
|||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||
|
2 |
|
y |
|
|
|
|
|
R |
|
|
|
|
R |
|
|
|
|
R |
|
|
|
|
|
R |
|
|
|
R |
|
y |
|
|
R |
|
|
|
||||
|
|
|
|
k |
|
|
|
|
|
z |
|
|
|
z |
|
|
|
|
z |
|
z |
|
|
|
z |
|
|
|
z |
|
k |
|
|
|
z |
|
|
z |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
k |
ωz |
kδв T |
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
= |
|
|
|
|
|
|
|
|
|
|
ξα |
+ |
|
|
ωz |
|
Θ α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
δв |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
1 |
+ kω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
kω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
z |
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ру передаточных функций, а лишь изменяет характеристики образующих их звеньев.
Необходимыми и достаточными условиями устойчивости автоматизированного контура управления продольным короткопериодическим движением самолета являются условия положительности коэффициента демпфирования и квадрата частоты колебаний:
hДТ = |
|
1 |
|
|
|
α |
− |
|
α |
|
+ |
|
|
|
ωz |
− |
|
δв |
|
k |
|
)>0, |
|
|||||||||||||
|
(F |
M |
|
M |
M |
|
ω |
|
||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||
к |
|
|
2 |
|
|
у |
к |
|
|
|
R |
z |
|
|
|
|
|
|
R |
z |
|
|
|
|
|
R |
z |
|
z |
(6.33) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωz |
|
|
|
|
|
|
|
|
|
δв |
|
|
|
|
|
|
||||||
|
ДТ |
2 |
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
(ω |
= M |
+ M |
F |
+ M |
k |
|
|
>0. |
|
|||||||||||||||||||||||||||
|
) |
|
|
R |
R |
|
|
|
R |
|
ω |
|
||||||||||||||||||||||||
к |
|
|
|
|
|
|
|
|
|
z |
|
z |
|
у |
к |
|
|
|
|
|
z |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|||||||
Правильным выбором передаточного коэффициента kωz добива-
ются выполнения условий (6.33), а также обеспечивают требуемые запасы устойчивости.
Анализ выражений (6.25) - (6.29) показывает, что демпфер тангажа положительно влияет на характеристики колебательного звена переда-
точных функций. Постоянная времени TαДТ уменьшается, частота собственных колебаний ωαДТ и относительный коэффициент затухания
ξαДТ увеличивается, однако при этом уменьшается коэффициент уси-
ления kδвДТ .
ωz
Одним из возможных путей сохранения эффективности продольного управления является использование в законе управления демпфера тангажа сигнала углового ускорения (6.6). Исследуем передаточную функцию замкнутой системы "самолет - демпфер тангажа " с управлением по угловому ускорению. В структурной схеме в цепи обратной
связи вместо коэффициента kωz появится kωz p . Структура переда-
(6.26) |
точной функции (6.30) не изменится, |
а характеристики передаточной |
|
функции примут следующие значения: |
|
|
|
ДТ |
|
2 |
|
|
|
1 |
|
|
|
2 |
|
|
|
|
δв |
|
|
|
|
|
|||||
(ω |
) |
|
|
= |
|
|
|
|
|
|
= ω |
(1+ k |
|
k |
|
) , (6.27) |
|
|
|||||||||
|
|
(TДТ)2 |
|
|
|
||||||||||||||||||||||
|
|
α |
|
|
|
|
|
|
|
α |
|
ωz |
|
ωz |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
k |
δДТ |
= − |
|
|
|
|
|
|
|
|
|
|
aω ,δ |
aα,α |
|
|
|
= |
|||||||||
ωв |
|
|
|
|
|
|
|
|
|
|
z в |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
z |
|
|
|
|
aω ,ω |
aα,α |
−aα,ω aω ,α |
+ aω ,δ aα,αkω |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
z z |
|
|
|
|
z |
z |
|
|
z |
в |
z |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, (6.28) |
||
|
|
Fα |
Mδв |
|
|
|
|
kδв |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
= |
|
ук |
|
|
|
Rz |
|
= |
|
|
|
|
ωz |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
(ωαДТ )2 |
1 |
+ kω |
kωδв |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
z |
|
|
|
|
|
|
|
|
|
|
|
δДТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aω ,δ |
a |
α,ω |
|
|
|
|
|
||||
k |
ωв ,α = − |
|
|
|
|
|
|
|
|
|
z в |
|
z |
|
|
|
= |
||||||||||
|
|
|
|
|
α,α −aα,ω a |
ω ,α + aω ,δ |
|
||||||||||||||||||||
|
|
z |
|
|
|
|
|
aω ,ω a |
aα,αkω |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
z |
z |
|
|
|
|
z |
z |
|
|
z |
в |
z |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. (6.29) |
||
= |
|
MδRв |
|
|
= |
|
|
kωδв ,α |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
z |
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
||||
|
(ωαДТ )2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
1+ kω kωδв |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
z |
|
|
|
|
|
|
|
|
|
|
kωδвДТ |
= kωδв |
, (6.34) |
|
|
|
|
|
|
|
|
|
|||||
z |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
TДТ |
= T |
2 |
+ k |
ω |
kДТT , (6.35) |
|
|
|
|
|||||||
α |
|
|
α |
|
ω |
θ |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
z |
z |
|
|
|
|
|
|
|
|
ωДТ |
= |
|
|
|
1 |
|
|
|
(6.36) |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
α |
|
|
T |
2 |
+ k |
|
kДТT |
|
|
|
|
|
|
|||
|
|
|
ω |
|
|
|
|
|
|
|||||||
|
|
|
α |
|
|
ω |
θ |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
z |
z |
|
|
|
|
|
|
|
|
ξДТ |
|
|
|
|
1 |
|
|
|
|
|
kω |
kωДТ |
|
|||
= |
|
|
|
|
|
|
|
|
|
ξ |
T + |
z |
z |
|
. (6.37) |
|
|
T 2 |
|
|
|
kДТT |
|
|
|||||||||
α |
|
|
+ k |
ω |
|
α α |
|
2 |
|
|||||||
|
|
|
α |
|
|
ω |
θ |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
z |
z |
|
|
|
|
|
|
|
|
Анализ выражений (6.34) - (6.37) показывает, что демпфер тангажа с управлением по угловому ускорению сохраняет неизменным коэффи-
циент усиления kδвдт , увеличивает относительный коэффициент зату-
ωz
хания ξαДТ , но уменьшает частоту собственных колебаний и увеличи-
вает постоянную времени TαДТ . Аналогично влияние на характеристи-
|
|
|
k |
ш.в |
kδвДТ (T p +1) |
ку передаточной функции демпфера тангажа с изодромным звеном в |
|||||||||||||||
W |
∆x |
в (p) = |
|
|
ω |
z |
|
θ |
|
, (6.30) |
цепи сигнала угловой скорости (6.7). |
|
|
|
|||||||
|
(TДТ )2 p2 |
|
|
|
|
|
|
|
Реакция самолета на ступенчатое отклонение органов управления в |
||||||||||||
∆ωz |
+ 2TДТξДТp +1 |
|
|
||||||||||||||||||
|
|
|
α |
|
|
|
|
|
|
α |
α |
продольном короткопериодическом движении была рассмотрена в |
|||||||||
|
∆ |
|
|
|
|
k |
ш.в |
kδвДТ |
|
|
|
параграфе 3.3.2 . Посмотрим, как изменится эта реакция, если в провод- |
|||||||||
|
|
|
|
|
|
|
|
ω ,α |
|
|
|
ку управления самолета включен демпфер тангажа. Маневр самолета в |
|||||||||
W |
x |
в (p) = |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
z |
|
, (6.31) |
продольной плоскости совершается энергичным отклонением летчиком |
||||||||||
|
p[(TДТ )2 p2 + |
|
|
||||||||||||||||||
∆α |
|
2TДТξДТp +1] |
|||||||||||||||||||
|
|
|
α |
|
|
|
|
|
|
α |
α |
колонки штурвала на величину ∆xв при этом закон изменения |
∆δв = |
||||||||
|
|
|
|
k |
|
|
k |
δДТ |
(T p +1) |
k |
ш.в |
∆x |
в |
близок к ступенчатому, то естъ ∆x (t)=1(t)∆x |
в |
и ∆x (p)= ∆x . |
|||||
W |
∆x |
в (p) = |
|
ш.в |
в |
|
|
|
в |
в |
в |
||||||||||
|
|
|
ωz |
|
θ |
. (6.32) |
|
|
Рассмотрим реакцию самолета с демпфером тангажа на ступенчатое |
||||||||||||
∆υ |
|
p[(TДТ )2 p2 + |
2TДТξДТp +1] |
|
отклонение пилотом колонки штурвала. На этапе короткопериодиче- |
||||||||||||||||
|
|
|
a |
|
|
|
|
|
|
a |
a |
ского движения произойдет формирование новых значений угловой |
|||||||||
На рис 6.5 представлена структурная схема замкнутой системы "са- |
скорости тангажа, угла атаки и нормальной перегрузки: |
|
|||||||||||||||||||
молет - демпфер тангажа". Преобразуя схему, получим передаточную функцию (6.30). Таким образом, демпфер тангажа не влияет на структу-
12 |
май 2003г. |
В.Г.Воробьев, С.В.Кузнецов АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
(∆ωz )уст |
= lim{p∆Xв(p)W∆ω∆x в (p)} = |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
p→0 |
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
k |
ш.в |
kδвДТ |
(T p +1) |
|
|
|
|
δ |
ДТ |
(6.38) |
|||||
|
p∆x |
в |
|
|
|
|
ω |
|
θ |
|
|
|
|
|
|
|
||||||
lim |
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
= ∆xвkш.вkωв |
|
|||
|
p |
|
|
[(TαДТ )2 p2 + 2TαДТξαДТp |
+1] |
|
||||||||||||||||
p→0 |
|
|
|
|
|
|
z |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆αуст = lim{p∆Xв(p)W∆α∆x в (p)} = ∆xвkш.вkωδвДТ,α , (6.39) |
|
|||||||||||||||||||||
|
|
|
p→0 |
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
(∆n |
уa |
) |
уст |
= lim{p∆X |
в |
(p)W∆x в |
(p)W∆∆x |
в (p)} = |
|
|
||||||||||||
|
|
|
|
p→0 |
|
|
|
|
∆nу |
a |
|
|
a |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. (6.40) |
|||||
= ∆xвkш.вkωδвДТ,α |
Vo |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
g |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так, как согласно (6.28)-(6.29) |
kωδвДТ |
< kωδв |
и |
kωδвДТ,α < k |
ωδв |
, то ус- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
z |
z |
z |
|
|
тановившееся значение угловой скорости тангажа, угла атаки и нормальной перегрузки для самолета, управляемого пилотом совместно с демпфером тангажа, уменьшаются.
Реакция самолета на ступенчатое отклонение колонки штурвала описывается переходными функциями:
|
|
∆f |
у |
(t) |
aωz ,fy |
aωz ,mzв |
aωz ,αw |
aωz ,αw |
|
|||||
|
|
|
|
|
||||||||||
в |
∆mzв(t) |
в |
|
|
0 |
aα,α |
|
aα,α |
|
|
||||
uпк(t) = |
|
∆αW |
(t) |
, Bпк = aα,f |
y |
w |
w |
. |
||||||
|
|
|
|
|
|
|
||||||||
|
|
∆α |
|
|
|
|
0 |
|
0 |
0 |
|
0 |
|
|
|
|
W |
(t) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(6.49)
Получим матрицу передаточных функций замкнутой системы "са- молет-демпфер тангажа" по параметрам продольного короткопериодического движения на внешние возмущения
Wв (p)= Yпк(p) =(Ip − A −Ву Dдт )−1 Вв = Фдт (p)Вв ,
пк в пк пк пк пк пк пк
Uпк(p)
(6.50)
где переходная матрица определена выражением (6.23).
6.2. АВТОМАТИЧЕСКОЕ ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ ПО КРЕНУ
∆ω (p) = |
∆x |
в W |
∆x |
|
(p) = |
kш.вkωδвДТ (Tθp +1)∆xв |
||||||||||||||||||||
|
|
|
|
|
|
в |
|
z |
|
|
|
|
|
, (6.41) |
||||||||||||
|
p |
|
|
|
p[(TДТ )2 p2 + 2T |
|
|
|
||||||||||||||||||
z |
|
|
|
|
|
∆ωz |
|
|
|
|
|
|
ДТξДТp +1] |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
α |
α |
||||
|
|
|
k |
|
|
|
Vo |
|
α |
|
|
|
|
|
|
kωδвдт ∆Xв |
|
|
|
|
|
|
||||
|
|
ш.в |
F |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
∆nуa (p) = |
|
|
|
|
|
|
ук |
|
|
|
|
|
|
|
z,a |
|
|
|
|
(6.42) |
|
|||||
|
|
|
|
|
g |
|
|
|
|
|
|
|
[(Tдт)2 p2 |
+ 2Tдт |
ξдтp +1] |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
a |
a |
|
|
|
|
||
Перейдем от изображения ∆nya (p) к оригиналу |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
k |
|
|
|
V0 |
|
α |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
ш.в |
F |
|
ДТ |
|
|
|
|
|
|
|
||||||||||
∆nу (p) = |
|
|
|
|
|
|
|
ук |
kωδв [1 |
− |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z,a |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
− |
|
1 |
|
|
|
|
|
e−ξαДТ t TαДТ sin |
1−(ξαДТ )2 |
|
t |
|
+ (6.43) |
|||||||||||||
|
|
|
|
|
|
|
|
TαДТ |
||||||||||||||||||
1−(ξαДТ )2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
+arcsin 1−(ξαДТ)2 ]∆xв
Выражение (6.43) определяет переходной процесс в продольном короткопериодическом колебательном движении самолета с демпфером тангажа при отклонении колонки штурвала пилотом. Динамические характеристики продольной устойчивости и управляемости определяются следующим образом:
TДТ |
|
|
|
|
2πTДТ |
|
|
|
дт = |
|
t |
|
|
|
|
|||||||
= |
|
|
|
|
|
a |
|
< T , |
f |
|
|
|
|
< f |
к |
, |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
к |
|
|
|
|
1 |
−(ξaдт)2 |
к |
|
к |
TaДТ |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
(tк |
)ДТ ≈ |
|
TДТ |
< tк , |
nДТ = |
|
(tк |
)ДТ |
|
|
|
|
||||||||||
|
a |
|
зат |
|
|
|
< n |
зат |
, |
|||||||||||||
|
ξДТ |
TДТ |
|
|
||||||||||||||||||
зат |
|
|
|
|
|
|
|
зат |
зат |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
ДТ |
|
|
∆nДТ − ∆nДТ |
уст |
|
|
|
|
|
|
|
|
|
|
|||
(∆nу |
|
) |
= |
|
уа |
уа |
|
|
< ∆nу |
. |
|
(6.44) |
|
|||||||||
а |
|
|
∆nДТ |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
уст |
|
|
|
|
|
а |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
уа |
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, включение демпфера тангажа в проводку управления рулем высоты приводит к уменьшению колебательности процесса управления, однако снижает эффективность продольного управления от колонки штурвала.
6.2.1. Демпферы крена
Устройство и работа. Необходимость демпфирования колебаний по крену возникает при непроизвольном отклонении самолета от исходного режима под действием внешних возмущений или при совершении маневра в горизонтальной плоскости. Если самолет обладает недостаточной степенью поперечной статической устойчивости по скорости крена, а также проявляется колебательность движения самолета по крену, необходимо обеспечить принудительное демпфирование. В режиме ручного (штурвального) управления пилот наблюдает за изменением угла крена по указателю авиагоризонта и воздействует на баранку штурвала при возникновении колебаний таким образом, чтобы отклонение элеронов противодействовало этим колебаниям. Для освобождения пилота от решения этой задачи служат демпферы крена.
Демпфер крена (ДК) - средство автоматического управления, обеспечивающее демпфирование колебаний самолета по крену на всех этапах полета путем отклонения элеронов при возникновении угловой скорости крена.
Простейший демпфер крена реализует следующий закон управления элеронами
∆δДКэ = kωx ωx (6.51)
где ∆δДКэ - автоматическое отклонение элеронов демпфером кре-
на от балансировочного положения kωx – передаточный коэффициент
по угловой скорости крена, показывающий, на какой угол должны отклониться элероны при изменении угловой скорости крена на 1град/с (1рад/с).
Другими словами, отклонение элеронов демпфером крена пропорционально угловой скорости крена.
Демпферы крена применяются на самолетах с бустерной или электродистанционной системами управления элеронами. Их рулевые агрегаты включаются в проводку управления по последовательной схеме, тогда общее отклонение элеронов от балансировочного положе-
ния ∆δэ равно сумме ручного отклонения элеронов пилотом посред-
ством штурвала ∆δРэ и автоматического отклонения демпфером крена
∆δэ = ∆δРэ +∆δДКэ . (6.52)
Реакция самолета на внешние возмущения при включенном |
Функциональная схема аналогового демпфера крена представлена |
||
демпфере тангажа. Рассмотрим модель продольного короткопериоди- |
на рис.6.6. Она аналогична функциональной схеме демпфера тангажа. |
||
ческого вынужденного движения самолета, управляемого демпфером |
Отклонение элеронов |
∆δР |
создается пилотом путем перемещения |
тангажа, при наличии внешних возмущений: |
|
э |
|
xпк (t) = Aпкxпк (t) + Bпку uпку (t) + Bпкв uпкв (t) , (6.45) yпк (t) = xпк(t) , (6.46)
uпку (t) = ∆δвДТ(t) , (6.47)
∆δвДТ (t) = DпкДТyпк(t) . (6.48)
Параметры модели определяются следующим образом:
∆xэ от балансировочного положения. С помощью дифференциальной качалки осуществляется суммирование этого сигнала с управляющим сигналом демпфера крена ∆δДКэ . Руле-
вой привод элеронов РПδэ формирует отклонение элеронов.
13 |
май 2003г. |

Глава 6. ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ САМОЛЕТА
Работа демпфера крена аналогична работе демпфера тангажа с той разницей, что при возникновении угловой скорости крена ωx датчик
ДУС вырабатывает электрический сигнал uωx пропорциональный
этой скорости. Вычислитель В вырабатывает управляющий сигнал uв согласно закону управления (6.47) на вход сумматора С сервопривода элеронов СПδэ . Сервопривод преобразует этот сигнал в перемещение
штока рулевого агрегата элеронов ∆δДКэ .
Влияние демпферов крена на поперечную устойчивость и управляемость. Покажем, что с помощью демпфера крена улучшается
ясняется тем, что такой демпфер крена, увеличивая эффективность поперечного управления, уменьшает демпфирование боковых колебаний.
6.2.2. Моделирование демпфирования колебаний по крену
Рассмотрим модель быстрого бокового движения "чистого крена" по угловой скорости и углу крена (4.54) при наличии управляющих воздействий пилота на штурвал и включенном демпфере крена. Модель содержит уравнение состояния, уравнения выхода и входа закон управления элеронами ручного контура и закон управления демпфера крена:
xбб(t) = Aббxбб(t) + Bббу uббу (t) , (6.63) yбб(t) = xбб(t) , (6.64)
uббу (t) = ∆δрэ (t) +∆δДКэ (t) , (6.65)
∆δрэ (t) = Dббр ∆xэ(t) , (6.66)
∆δДКэ (t) = DббДКyбб(t) (6.67)
Параметры модели определяются следующим образом:
|
∆ωx (t) |
aωx ,ωx |
0 |
у aωx ,δэ |
|
|||||
xбб(t) = |
∆γ(t) |
|
, Aбб = |
|
|
, |
Bбб = |
0 |
, |
|
|
|
|
a |
γ,ω |
x |
0 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
kω |
|
|
= kш.э . (6.68) |
|
|
|
|
|
|
|
DббДК = |
x , Dббр |
|
|
|
|
|
|
|||
0 |
|
|
|
|
|
|
|
|
|
|
степень поперечной статической устойчивости самолета |
mωx x . При |
Подставим уравнения выхода (6.64) и входа (6.65), а также законы |
||||||||||||||||||||||||||||||||||||||||||||||||
управления (6.66), (6.67) в уравнение состояния (6.63) и выполним |
||||||||||||||||||||||||||||||||||||||||||||||||||
отклонении элеронов демпфером появляется приращение коэффициен- |
преобразование Лапласа при нулевых начальных условиях |
|||||||||||||||||||||||||||||||||||||||||||||||||
та момента крена |
|
|
|
|
|
|
|
|
|
|
(Ip − A |
бб |
−Bу |
DДК )Y |
(p) = Bу |
Dp |
∆Χ |
э |
(p) (6.69) |
|||||||||||||||||||||||||||||||
∆mx = mδxэ ∆δэДК = mδxэ kωx ωx (6.53) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
бб |
|
бб1 |
|
|
бб |
|
|
|
|
|
|
|
бб |
бб |
|
|
|
|
||||||||||||||||
|
|
|
|
Получим вектор передаточных функций системы "самолет-демпфер |
||||||||||||||||||||||||||||||||||||||||||||||
Возьмем частную производную выражения (6.53) по угловой ско- |
крена" в быстром боковом движении самолета по угловой скорости и |
|||||||||||||||||||||||||||||||||||||||||||||||||
рости ωx : |
|
|
|
|
|
|
|
|
|
|
|
углу крена на отклонение пилотом штурвала при включенном демпфере |
||||||||||||||||||||||||||||||||||||||
= mδэ k |
|
|
|
|
|
|
|
|
|
крена |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
∆mωx |
ω |
(6.54) |
|
|
|
|
|
|
ДК |
|
|
|
|
|
|
|
|
|
Y |
(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
x |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
бб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
x |
|
|
|
|
|
|
|
|
Wбб |
|
(p) |
= |
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Следовательно, при включенном демпфере крена |
|
|
|
|
|
∆Xэ(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
(mωx x )ДК = mωx x |
+ mδxэ kωx (6.55) |
|
|
|
|
|
= (Ip − A |
бб |
−Bу |
DДК )−1Bу |
|
Dp |
|
= ФАБУ |
(p)Bу Dp . (6.70) |
|||||||||||||||||||||||||||||||||||
| (mωx x )ДК |>| mωx x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
бб |
|
бб |
|
|
|
бб |
|
|
бб |
|
|
бб |
|
|
|
бб |
бб |
|||||||||||||||
| , (6.56) |
|
|
|
|
|
Переходная матрица состояния быстрого бокового движения само- |
||||||||||||||||||||||||||||||||||||||||||||
что доказывает повышение статической устойчивости бокового |
лета при включенном демпфере крена |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
движения. |
|
|
|
|
|
|
|
|
|
|
|
ФббДК (p) = (Ip − Aбб −Bббу DббДК )−1 = (φббДК (p))−1 . (6.71) |
||||||||||||||||||||||||||||||||||||||
Убедимся в том, что с помощью демпфера крена улучшается дина- |
Элементами |
|
вектора |
WДК |
(p) являются передаточные функции |
|||||||||||||||||||||||||||||||||||||||||||||
мическая устойчивость бокового движения. На рис.6.7 показаны пере- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
бб |
|
|
|
|
|
|
|
|
|
|
|
|
∆Xэ(p) |
|
|||||||||||||||
ходные процессы, возникающие в результате ступенчато отклонения |
самолета на управляющее воздействие пилота |
к соответст- |
||||||||||||||||||||||||||||||||||||||||||||||||
пилотом элеронов на угол ∆δэР . Демпфер крена уменьшает постоян- |
вующим параметрам вектора выхода |
|
Yбб(p) , |
совпадающего в рас- |
||||||||||||||||||||||||||||||||||||||||||||||
ную времени по угловой скорости крена |
TДК |
< T |
|
. Однако так как |
сматриваемом |
|
|
случае |
с вектором |
|
переменных |
состояния быстрого |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
ω |
ω |
x |
|
|
бокового кренового движения Xбб(p) |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
отклонение |
элеронов |
демпфером ∆δДК |
вычитается из |
отклонения |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆x |
|
|
|
|
|
|
|
|
∆x |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
э |
|
|
|
|
|
[W |
ДК |
|
|
|
|
T |
|
=[W |
э |
(p) |
|
W |
э |
(p)] (6.72) |
|
|
|
|||||||||||||||||||||
|
|
∆δэР , общее отклонение элеронов |
∆δэ |
|
|
|
|
|
(p)] |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
элеронов пилотом |
становится |
|
бб |
|
|
|
|
|
|
|
|
|
|
|
|
∆ωx |
|
|
|
|
|
|
∆γ |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
меньше. Это приводит к уменьшению установившегося значения угло- |
Переходная матрица состояния |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
{φДК |
(p)} |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
ДК |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
вой скорости крена (ωx |
|
)уст по сравнению с управлением без демп- |
ΦббДК (p) = |
|
|
|
бб |
|
|
пр |
|
(6.73) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
φббДК (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
фера, то есть эффективность управления элеронами от штурвала |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
уменьшается. Это является основным недостатком демпфера крена. |
Определитель матрицы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ΦббДК (p) |
|
= |
|
p −aω ,ω |
|
−aω |
|
,δ |
|
kω |
|
0 |
|
|
= |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
x |
э |
x |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−aγ,ω |
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
= p(p −aωx ,ωx |
−aωx ,δэ kωx ) . (6.74) |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Присоединенная матрица |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
{ΦДК (p)} |
|
|
|
= |
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.(6.75) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
бб |
|
|
|
|
пр |
|
|
|
|
aγ,ωx |
|
p −aωx ,ωx −aωx ,δэ kωx |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДК |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Формирование управления пропорционально угловому ускорению |
W∆x |
э (p) |
= |
kш.эk |
ωδэx |
|
|
(6.76) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
∆ωx |
|
|
|
|
|
|
|
|
|
TДКp + |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
крена ωx |
в демпферах крена распространения не получило. Это объ- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
май 2003г. |
|
||||||