-
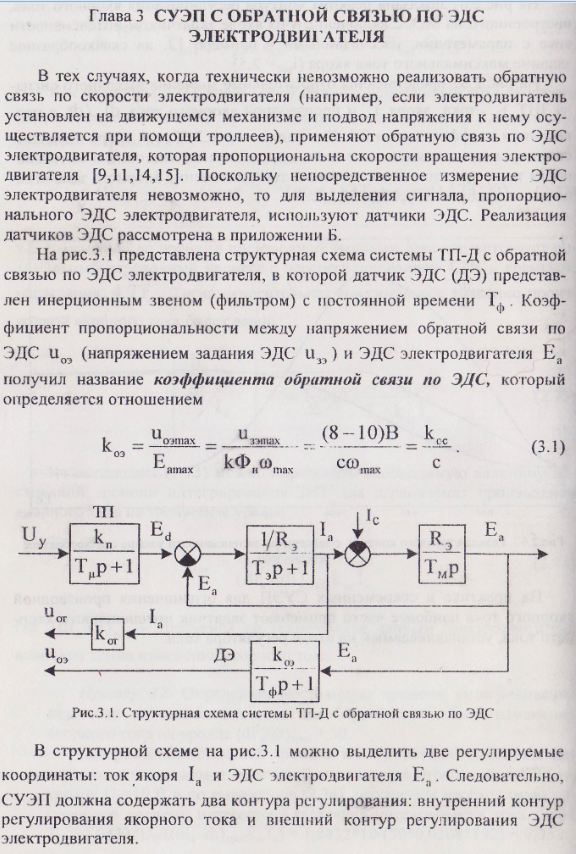
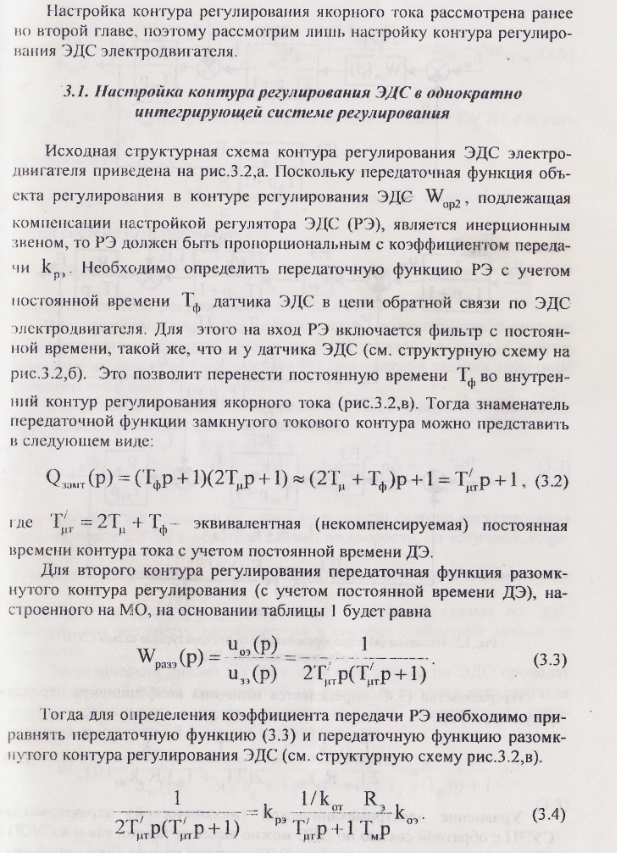
Система подчиненного регулирования с регулятором эдс
-
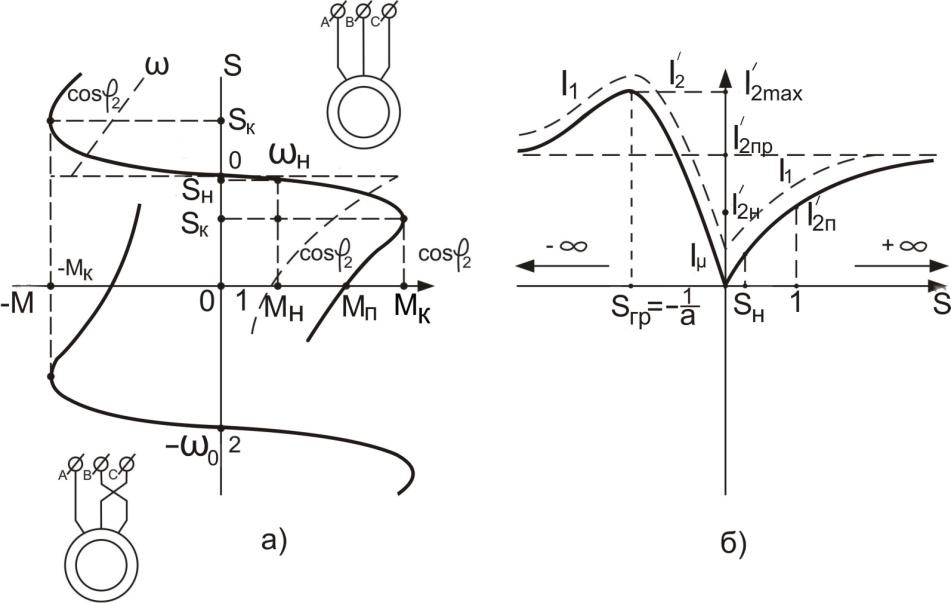
Нарисовать и объяснить скоростные характеристики асинхронного электропривода
Рис.
5.5. Упрощённая схема замещения асинхронной
машины Уравнение
механической характеристики

 получим,
приравняв потери в роторной цепи,
выраженные через механические и
электрические величины. Мощность,
потребляемая двигателем из сети, если
пренебречь потерями в стали статора
получим,
приравняв потери в роторной цепи,
выраженные через механические и
электрические величины. Мощность,
потребляемая двигателем из сети, если
пренебречь потерями в стали статора

 и потерями в меди статора
и потерями в меди статора

 ,
примерно равна электромагнитной
мощности
,
примерно равна электромагнитной
мощности

 ,
где M
-электромагнитный момент, а мощность
на валу при пренебрежении потерями
,
где M
-электромагнитный момент, а мощность
на валу при пренебрежении потерями

 ,
,

 определится как
определится как
 .
Тогда
потери в роторной цепи
.
Тогда
потери в роторной цепи

 .
С другой стороны
при выражении этих потерь через
электрические величины, получим
.
С другой стороны
при выражении этих потерь через
электрические величины, получим
 ,откуда
,откуда
 .
. Из следует, что
для определения зависимости
Из следует, что
для определения зависимости

 асинхронного двигателя необходимо
знать зависимость
асинхронного двигателя необходимо
знать зависимость

 .В
соответствии со схемой замещения ток
ротора найдётся по формуле
.В
соответствии со схемой замещения ток
ротора найдётся по формуле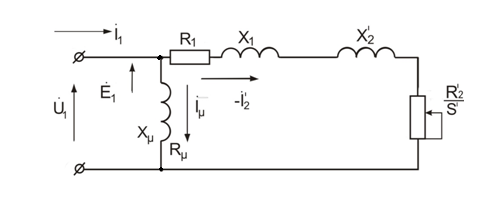

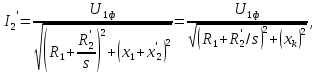 где
где

 -
фазное значение напряжения обмотки
статора
-
фазное значение напряжения обмотки
статора
 - индуктивное
фазное сопротивление короткого
замыкания.Подстановка в даёт уравнение
механической характеристики
- индуктивное
фазное сопротивление короткого
замыкания.Подстановка в даёт уравнение
механической характеристики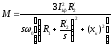
 .
Анализ
этого уравнения показывает, что
зависимость
.
Анализ
этого уравнения показывает, что
зависимость 
 имеет максимум,
так как при скольжении
имеет максимум,
так как при скольжении 
 ,
,


 .
Максимальное
значение момента
.
Максимальное
значение момента 
 называется критическим. Соответствующее
ему скольжение (
называется критическим. Соответствующее
ему скольжение (
 )
также называется критическим. Согласно
общему правилу нахождения экстремума
функции, необходимо определить производную
)
также называется критическим. Согласно
общему правилу нахождения экстремума
функции, необходимо определить производную

 уравнения (5.19),
приравнять её к нулю и определить
критическое скольжение
уравнения (5.19),
приравнять её к нулю и определить
критическое скольжение
 .
Подставляя
.
Подставляя

 ,
находим
,
находим
 .Знаки
(
.Знаки
( )
в означают, что максимум момента может
иметь место при
)
в означают, что максимум момента может
иметь место при
 в
двигательном
режиме и при
в
двигательном
режиме и при
 в
генераторном режиме. Знак плюс в (5.21)
соответствует
в
генераторном режиме. Знак плюс в (5.21)
соответствует
 ,
а
минус
,
а
минус
 .
Из
(5.21) также видно, что при работе в
генераторном режиме с рекуперацией
энергии критический момент больше, чем
в двигательном режиме .Из уравнений с
учётом может быть получена другая
формула для механической характеристики
.
Из
(5.21) также видно, что при работе в
генераторном режиме с рекуперацией
энергии критический момент больше, чем
в двигательном режиме .Из уравнений с
учётом может быть получена другая
формула для механической характеристики
 ,
в
которой параметрами являются величины
,
в
которой параметрами являются величины

 ,
,
 ,
и
,
и

 .
На практике иногда полагают, что
.
На практике иногда полагают, что 
 .
Это обычно не приводит к существенным
погрешностям при
.
Это обычно не приводит к существенным
погрешностям при
 5кВт.
В этом случае можно воспользоваться
упрощёнными формулам
5кВт.
В этом случае можно воспользоваться
упрощёнными формулам

 ;
;

 . Основное
преимущество записи механической
характеристики в виде (5.23) по сравнению
с (5.22) заключается в том, что для (5.23)
достаточно знать лишь параметры, которые
обычно указываются в каталогах. В
каталогах на асинхронные двигатели,
помимо номинальных данных
. Основное
преимущество записи механической
характеристики в виде (5.23) по сравнению
с (5.22) заключается в том, что для (5.23)
достаточно знать лишь параметры, которые
обычно указываются в каталогах. В
каталогах на асинхронные двигатели,
помимо номинальных данных

 ,
, ,
,
 и
др., приводится значение
и
др., приводится значение

 ,
которое называют
также перегрузочной способностью.
Другие параметры и величины можно
определить по следующим формулам:
,
которое называют
также перегрузочной способностью.
Другие параметры и величины можно
определить по следующим формулам:
номинальный
момент
 ,
номинальное
скольжение
,
номинальное
скольжение
 ,
критическое
значение скольжения для машин малой
мощности с
,
критическое
значение скольжения для машин малой
мощности с


 .
.
 ,
, для крупных
двигателей (
для крупных
двигателей ( =0
=0 .
Для анализа формы
механической характеристики и режимов
работы асинхронного электропривода
воспользуемся формулами (5.23) – (5.29). На
рис. 5.7 представлена механическая
характеристика асинхронного двигателя
.
Для анализа формы
механической характеристики и режимов
работы асинхронного электропривода
воспользуемся формулами (5.23) – (5.29). На
рис. 5.7 представлена механическая
характеристика асинхронного двигателя

 .
Как и для двигателей
постоянного тока, у асинхронного
двигателя имеется естественная
механическая и электромеханическая
характеристики при
.
Как и для двигателей
постоянного тока, у асинхронного
двигателя имеется естественная
механическая и электромеханическая
характеристики при
 ,
,
 ,
и отсутствии
добавочных сопротивлений в статорной
и роторной цепях. Все другие характеристики
искусственные.Проанализируем форму
механической и скоростной характеристик,
представленной на рис. 5.7.
,
и отсутствии
добавочных сопротивлений в статорной
и роторной цепях. Все другие характеристики
искусственные.Проанализируем форму
механической и скоростной характеристик,
представленной на рис. 5.7.
Рис.
5.7. Зависимости 
 ,
,

 (а), и
(а), и 
 ,
,

 (б) асинхронного
двигателя При изменении скольжения от
0 до 1 асинхронная машина работает в
двигательном режиме. Скольжению S=0
соответствует идеальный холостой ход,
ротор двигателя имеет синхронную
скорость
(б) асинхронного
двигателя При изменении скольжения от
0 до 1 асинхронная машина работает в
двигательном режиме. Скольжению S=0
соответствует идеальный холостой ход,
ротор двигателя имеет синхронную
скорость

 .
Скольжение
.
Скольжение
 свидетельствует
о номинальной скорости вращения ротора
свидетельствует
о номинальной скорости вращения ротора

 ,
двигатель при этом
развивает номинальный момент и по
обмоткам протекают номинальные токи
,
двигатель при этом
развивает номинальный момент и по
обмоткам протекают номинальные токи

 ,
,
 .
При скольжении
.
При скольжении 
 двигатель развивает
максимальный (критический) момент
двигатель развивает
максимальный (критический) момент 
 .
Скольжению
.
Скольжению

 соответствует
пусковой момен
соответствует
пусковой момен <
< ,который
при
,который
при 
 равен
равен 
 .При
скольжении
.При
скольжении

 асинхронная машина работает в режиме
противовключения. Скольжению
асинхронная машина работает в режиме
противовключения. Скольжению

 соответствует
генераторный режим параллельно сетью
(рекуперативное торможение), в котором
соответствует
генераторный режим параллельно сетью
(рекуперативное торможение), в котором
 >
>
 .
Зависимость
.
Зависимость

 можно получить из
схемы замещения рис. 5.4
можно получить из
схемы замещения рис. 5.4
 ,
следовательно,
,
следовательно,

 при возрастании
модуля скольжения монотонно убывает,
стремясь при
при возрастании
модуля скольжения монотонно убывает,
стремясь при

 к нулю (рис. 5.7,а).Как следует из формулы
(5.10) с изменением скольжения от нуля до
к нулю (рис. 5.7,а).Как следует из формулы
(5.10) с изменением скольжения от нуля до

 ток ротора монотонно увеличивается до
ток ротора монотонно увеличивается до

 (рис. 5.7,б)
(рис. 5.7,б)
 .
При
.
При

 пусковой ток определяется по формуле
пусковой ток определяется по формуле
 и
составляет на естественной характеристике
и
составляет на естественной характеристике

 .
Для уменьшения
пусковых токов, необходимо включать в
роторную цепь (АД с фазным ротором)
активные или индуктивные сопротивления,
а также в статорную цепь двигателей.В
генераторном режиме параллельно с сетью
при изменении
.
Для уменьшения
пусковых токов, необходимо включать в
роторную цепь (АД с фазным ротором)
активные или индуктивные сопротивления,
а также в статорную цепь двигателей.В
генераторном режиме параллельно с сетью
при изменении 
 ток растёт до своего максимального
значения при
ток растёт до своего максимального
значения при

 ,
,

 ,
а
затем монотонно снижается до
,
а
затем монотонно снижается до 
 (рис. 5.7,б). При
(рис. 5.7,б). При 
 вектор
тока ротора перпендикулярен вектору
вектор
тока ротора перпендикулярен вектору

 и является чисто реактивным, и рекуперация
энергии в сеть прекращается. Если принять
магнитный поток Ф=const,
то, как следует из формулы (5.4) момент
двигателя достигает максимального
значения
и является чисто реактивным, и рекуперация
энергии в сеть прекращается. Если принять
магнитный поток Ф=const,
то, как следует из формулы (5.4) момент
двигателя достигает максимального
значения

 при
при

 ,
где
,
где

 ;
;

 .
Максимальное значение момента двигателя
в двигательном режиме определяет его
перегрузочную способность. При этом
нужно иметь в виду, что
.
Максимальное значение момента двигателя
в двигательном режиме определяет его
перегрузочную способность. При этом
нужно иметь в виду, что

 пропорционален квадрату приложенного
напряжения
пропорционален квадрату приложенного
напряжения 
 ,
вследствие
чего асинхронный двигатель весьма
чувствителен к колебаниям напряжения
сети. В каталожных данных для асинхронных
двигателей указывается перегрузочная
способность двигателя при номинальном
напряжении
,
вследствие
чего асинхронный двигатель весьма
чувствителен к колебаниям напряжения
сети. В каталожных данных для асинхронных
двигателей указывается перегрузочная
способность двигателя при номинальном
напряжении

 .
При определении
момента допустимой перегрузки следует
учитывать возможное снижение напряжения
сети на 10%
.
При определении
момента допустимой перегрузки следует
учитывать возможное снижение напряжения
сети на 10%
 .
.