

Elektrichesky_privod_Kosmatov_V_I_2012
.pdfРис. 2.12,а. Схема движения, идеализированные механические характе-
ристики  = f ( М ) и кривые М = f ( t ) , = f ( t ) при реактивном моменте статического сопротивления Мс
= f ( М ) и кривые М = f ( t ) , = f ( t ) при реактивном моменте статического сопротивления Мс
40
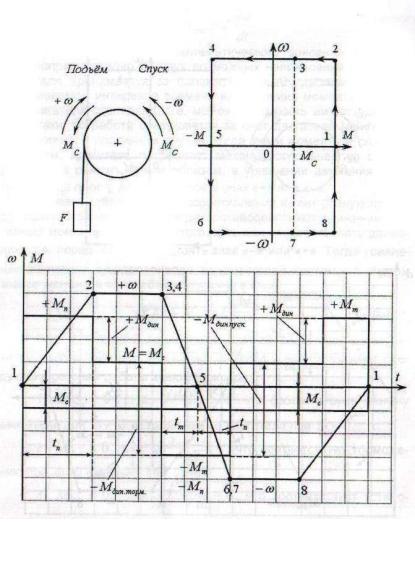
Рис. 2.12,б. Схема движения, идеализированные механические характе-
ристики  = f ( М ) и кривые М = f ( t ) , = f ( t ) при активном моменте статического сопротивления Мс
= f ( М ) и кривые М = f ( t ) , = f ( t ) при активном моменте статического сопротивления Мс
41
При равенстве М М с ускорение М = 0 , привод осуществляет
установившееся движение при с |
( с ). |
|||
В общем случае время пуска и торможения найдѐтся по уравне- |
||||
нию |
|
|
|
|
tn,m |
J c |
. |
(2.53) |
|
|
||||
|
M дин |
|
||
Величина динамического момента |
M дин |
определяет время пере- |
||
ходных процессов при пуске и торможении. Следует отметить, что при реактивном М с
tn |
J c |
|
tm |
J c |
|
при |
|
Mn |
|
|
|
|
Mm |
|
, |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
M n M с |
|
M n M с |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
а при активном моменте М с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
tn.под |
|
J c |
tm.спуск |
J c |
|
|
|
при |
|
Mn |
|
|
|
Mm |
|
, |
|||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
M n M с |
|
|
|
M m |
M с |
|
|
|
|
|
|
|
|
|||||||||||
тогда как в режиме пуска на опускание груза и в режиме торможения при подъѐме груза
tn.спуск |
J c |
|
tm.под |
|
J c |
|
при |
|
Mn |
|
|
|
Mm |
|
. |
||||||||
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
M n M с |
|
|
|
M m M с |
|
|
|
|
|
|
|
|
|
|||||||||
Следует отметить, что если, |
|
например, |
|
задан количественно |
|||||||||||||||||||
пусковой М n 2М н |
и М с М н , то время пуска |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
J н |
|
|
J н2 |
J н2 1 |
|
|
|
|
|
|
|
|
||||||||
|
tn |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
, |
(2.54) |
|||||
|
2M н M н |
|
|
|
|
|
2 Рн |
|
|||||||||||||||
|
|
|
M н н |
|
|
|
|
|
|
|
|
|
|||||||||||
т.е. при заданной пусковой мощности время пуска будет определяться двойным запасом кинетической энергии привода
|
|
|
J 2 |
|
||
W |
|
2 |
н |
. |
(2.55) |
|
к .пуск |
2 |
|||||
|
|
|
|
|||
|
|
|
|
|
||
|
42 |
|
|
|
|
|
Всвязи с этим с целью экономии электрической энергии, потребляемой из сети, и потерь энергии в электроприводе нужно проектировать электропривод с минимальным запасом кинетической энергии.
Врежимах торможения с целью уменьшения потерь энергии в приводе оно должно осуществляться с нагрузкой. Тогда
tm tn |
|
J c |
|
|
|
|
|
J н |
|
|
|
J н2 |
|
1 |
; |
(2.56) |
||||||||
M m M с |
M н M н |
|
|
2 Рн |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
J 2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
W |
|
|
|
|
|
|
|
н |
, |
|
|
|
|
|
|
|
|
|
(2.57) |
||
|
|
|
к .торм |
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т.е. пропорционально запасу кинетической энергии при тормозной |
||||||||||||||||||||||||
мощности равной пусковой. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Время свободного выбега привода при М схх 5%М н |
|
|||||||||||||||||||||||
|
|
|
|
J |
хх |
|
|
|
J 2 |
|
|
1 |
|
|
|
|
|
|
||||||
|
t |
|
|
|
|
|
2 |
хх |
|
|
|
|
|
, |
|
|
|
(2.58) |
||||||
|
св.в |
|
M хх |
2 |
|
|
|
Рхх |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
т.е. практически при заданной мощности холостого хода определяется двойным запасом кинетической энергии привода и является относительно большим.
Угол поворота вала двигателя за время пуска, торможения
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
n m dt . |
(2.59) |
||
|
|
|
|
|
0 |
|
|
|
При равноускоренном (замедленном) движении |
|
|||||||
|
|
|
|
|
t , |
|
|
(2.60) |
где |
d |
|
|
M дин |
- ускорение (замедление). |
|
||
dt |
J |
|
||||||
|
|
|
|
|
|
|||
Тогда |
|
|
|
|
|
|
||
|
|
|
|
|
tn ,mc |
t 2 |
|
|
|
|
|
|
|
n m tdt |
n,m |
. |
(2.61) |
|
|
|
|
|
2 |
|||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
43 |
|
|
|

При движении с установившейся скоростью с |
const |
c t y . |
(2.62) |
На рис. 2.13 представлены тахограмма = f(t) и изменение угла поворота за цикл работы механизма.
Рис. 2.13. К расчѐту угла поворота вала двигателя
2.5 Механические характеристики двигателей и
механизмов в электроприводе
Зависимость скорости от электромагнитного момента М двигателя принято называть механической характеристикой электроприво-
да, а зависимость от момента статического сопротивления M c ,
приведѐнного к валу двигателя – механической характеристикой механизма. Уравнение движения электропривода
M ( ) M c ( ) 0 |
(2.63) |
соответствует установившемуся движению с с const .
44
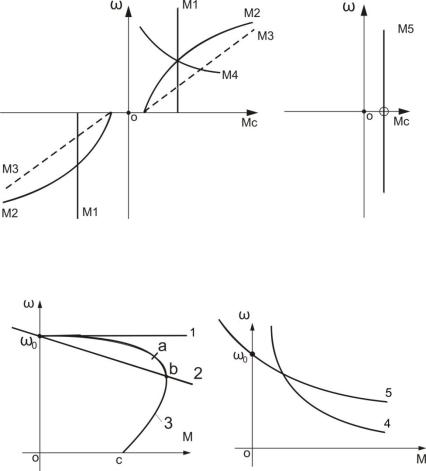
Механические характеристики механизмов, рассмотренные во второй главе, представлены на рис. 2.14
Рис. 2.14 Механические характеристики механизма М с = f ( 
Механические характеристики электрических двигателей представлены на рис. 2.15
Рис. 2.15 Механические характеристики электрических двигателей: 1 – синхронный двигатель; 2 – ДПТ НВ, 3 – асинхронный двигатель; 4 –
ДПТ ПВ; 5 – ДПТ СВ
45

Механические характеристики двигателей принято оценивать их жѐсткостью
дв dMd ,
величина , которая показывает степень изменения скорости при изменении момента. В вязи с этим различают характеристики абсолютно жѐст-
кие (1) с , жѐсткие (2) с 50 10, мягкие (4,5). У асинхронного
двигателя на участке |
– а жѐсткая характеристика, в точке b – 0 , |
||||||
на участке (b-c) |
|
(см. рис. 2.15). |
|||||
|
|
Жѐсткость механических характеристик механизма |
|||||
|
|
|
dM с |
|
(см. рис. 2.14). |
||
м ех |
d |
||||||
|
|
|
|
||||
|
|
|
|
|
|||
Решение уравнения движения
М ( ) М с ( ) М дин( ) М сов м( )
позволяет графически просто построить совместную характеристику электропривода и определить координаты: скорости и момента – в установившемся режиме (см. рис. 2.16)
Рис. 2.16. К построению совместной характеристики и определению установившегося движения
Статический режим (установившееся движение) может быть устойчивым, если после действия любого случайного возмущающего воздействия система возвращается к исходному статическому состоянию
46
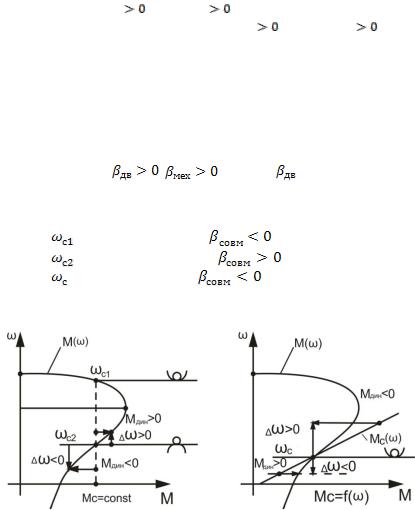
( < 0;Мдин = Мсовм |
) или ( |
;Мдин = Мсовм < 0) (см. рис. 2.16) |
||||||||||
и неустойчивым, если не возвращается ( |
; Мдин = Мсовм |
) или |
||||||||||
( < 0; Мдин = Мсовм < 0) (см. рис. 2.17). |
|
|
|
|
|
|
||||||
Другими словами, если жѐсткость совместной характеристики |
||||||||||||
|
|
сов м |
M сов м М |
М с |
|
дв |
|
м ех |
0 , |
(2.64) |
||
|
|
|
|
|
с |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
несмотря на то, что |
|
; |
и больше |
, система статически |
||||||||
устойчива. |
|
|
|
|
|
|
|
|
|
|
|
|
На рис. 2.17: |
|
|
|
|
|
|
|
|
|
|
|
|
т. |
- устойчивое движение |
|
; |
|
|
|
|
|
||||
т. |
|
неустойчивое движение |
|
; |
|
|
|
|
|
|||
т. |
устойчивое движение |
|
; |
|
|
|
|
|
||||
Рис. 2.17. Определение устойчивости статического режима с асинхронными двигателями
47
2.6. Режимы преобразования энергии в электроприводе и ограничения, накладываемые на их протекание
Возможны следующие основные режимы преобразования в ЭМП
(рис. 2.18):
1.Преобразование электрической энергии в механическую -
двигательный режим (рис. 2.18,а). Здесь мощность Р1 , поступающая из сети, в основном преобразуется в механическую Рм ех и частично в потери в стали и сопротивлениях обмоток.
2.Если механическая мощность Рм ех поступает с вала двигателя, то машина работает генератором параллельно с сетью и отдаѐт мощность в сеть за вычетом потерь Р . Это тор-
мозной режим работы двигателя – рекуперативное торможе-
ние (рис. 2.18,б).
3.Режим противовключения (генераторный последовательно с сетью). Это тормозной режим – мощность из сети Рс и с вала Рм ех поступают в машину и преобразуются в потери Р
(рис. 2.18,в).
4.Режим динамического торможения (генераторный режим независимо от сети). Механическая мощность, поступающая к ЭМП, преобразуется в электрическую и выделяется в нѐм в виде потерь Р в сопротивлениях силовых цепей и стали
(рис. 2.18,г).
Кроме основных режимов преобразования энергии возможны режимы холостого хода, идеального холостого хода и короткого замыкания.
На рис. 2.18,д приводятся статические механические характеристики двигателя, соответствующие двум направлениям вращения ротора (якоря). В первом и третьем квадрантах энергия поступает из сети  - это двигательный режим ЭМП. Во втором и четвѐр-
- это двигательный режим ЭМП. Во втором и четвѐр-
том квадрантах  - тормозные режимы.
- тормозные режимы.
48

Рис. 2.18. Режимы преобразования энергии Процессы электромеханического преобразования энергии сопро-
вождаются потерями энергии в активных сопротивлениях обмоток машин, в стали магнитопроводов, а также механическими потерями.
Мощность потерь
|
|
I |
|
2 |
Р k v |
|
|
|
, |
|
||||
|
н |
|
|
|
|
|
Iн |
|
|
где k Рc Рм ех Рв озб - постоянные потери;
|
|
|
I 2 - переменные потери в активных сопротивлениях силовых |
||||
v |
н |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Iн |
|
|
|
|
цепей двигателя; |
|
||||||
vн - номинальные переменные потери; |
|||||||
v |
|
3I 2 R I '2 R' - для асинхронных двигателей; |
|||||
|
н |
|
1н |
|
1 |
2н 2 |
|
v |
|
I 2 R |
я |
– для двигателей постоянного тока; |
|||
|
н |
|
ян |
|
|
||
|
|
|
|
|
|
|
49 |