

Устройство_КА_лекция 2_конспект
.pdfЛекция 2
Бортовой компл екс управления
Бортовой комплекс управления (БКУ) – это «мозг» космического аппарата. Аппаратура БКУ отвечает за приём команд с Земли, формирование бортовых команд по сигналам НКУ или в соответствии с временными метками, диагностику состояния бортового оборудования, сбор телеметрической информации и передачу этой информации на Землю. Также в задачи БКУ входит реализация логики работы КА в различчных режимах, формирование бортовой шкалы времени и организация режимов обеспечения живучести.
СПИСОК СОКРАЩЕНИЙ
БА – |
бортовая аппаратура; |
МКО – |
мультиплексный канал обмена; |
БАТС – |
бортовая аппаратура телесигнализации; |
НКУ – |
наземный комплекс управления; |
БИ – |
блок интерфейсный; |
ОЗУ – |
оперативное запоминающее |
|
|
|
устройство; |
БКУ – |
бортовой комплекс управления; |
ПО – |
программное обеспечение; |
БУ – |
блок управления; |
РК – |
радиокоманда; |
БЦВК – |
бортовой цифровой вычислительный комплекс; |
РН – |
ракета-носитель; |
ВМ – |
временная метка; |
СТР – |
система терморегулирования; |
КА – |
космический аппарат; |
СУ РБ – |
система управления разгонным |
|
|
|
блоком; |
КИС – |
командно-измерительная система; |
СЭП – |
система электропитания; |
КПИ – |
контрольно-проверочная информация; |
ТМ – |
телеметрия; |
КУ – |
команда управления; |
ТМИ – |
телеметрическая информация. |
1
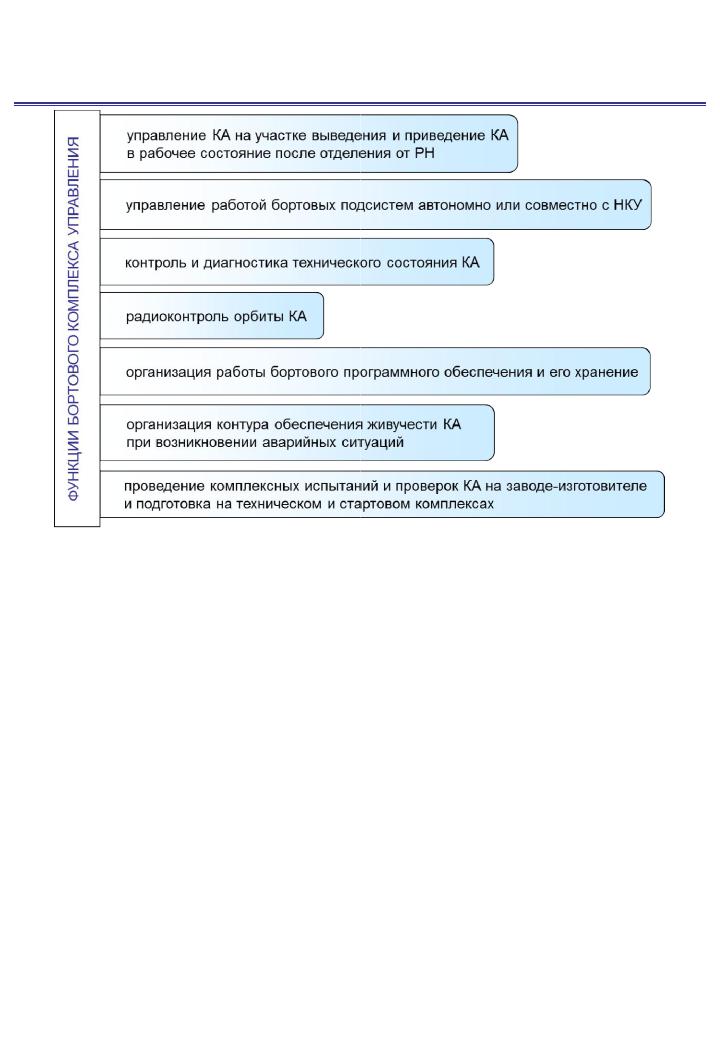
Назначение БКУ
Управление космическим аппаратом на участке выведения заключается в сборе телеметрии и включении необходимых обогрревателей бортовой аппаратуры. Приведение спутника в рабочее состояние состоит в выполнении последовательности команд (в соответствии с заранее заложенной программойй) по коммутации электропитания на аппаратуру бортовых систем, проверке функционирования оборудования, а также раскрытию солнечных батарей и антенн.
Управление работой бортовых подсистемм – основная функция БКУ, заключающаяся в приёме команд и программ работы от НКУ, преобразование радиокоманд в цифровые коды, передача этих кодов в подсистемы КА. Автономная работа производится по заранее заложенной с Земли программе работы.
Контроль и диагностика технического состояния КА представляют собой сбор телеметрической информации, сравнение полученных данных с критериями работоспособности и переключение, в случае отказа основного комплекта аппаратуры, на резервный комплект.
Радиоконтроль орбиты заключается в приёме радиосигнала с Земли и немедленной отправке такого же сигнала обратно, для того, чтобы можно было определить расстояние между Землёй и КА по времени прохождения радиосигнала.
Бортовое программное обеспечение (ПО) хранится в постоянной памяти бортового компьютера и обладает возможностью корректировки по командам с НКУ.
Обеспечение живучести КА основано на исключении из контура управления оборудования, надёжность которого зависит от работоспособности программного обеспечения, то есть бортового компьютера. Для этого в составе БКУ предусмотрен блок управления, в котором организована матрица команд, исполняемых без участия бортового компьютера.
При испытаниях на заводе-изготовителе БКУ должен обеспечивать возможность подключения к нему имитаторов полезной нагрузки, а также имитаторов команд с НКУ.
2
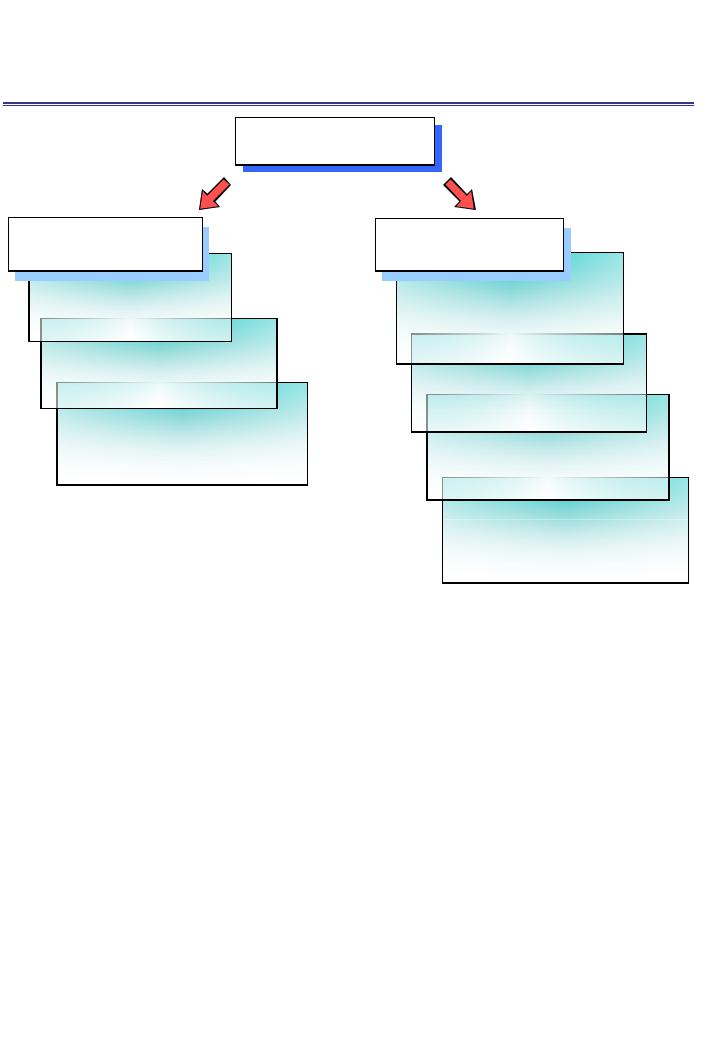
Классификация построения БКУ
Построение БКУ
Аппаратное |
Программное |
построение |
построение |
командное управление |
адаптивное автономное |
средствами НКУ |
управление по результатам |
|
диагностики БА КА |
программно-временное |
|
управление средствами НКУ |
командное управление по |
|
радиокомандам с НКУ |
автономное аппаратное |
|
управление с неизменяемыми |
программное управление на |
алгоритмами управления |
|
|
основе данных с НКУ |
|
аппаратное управление в |
|
режимах обеспечения |
|
живучести |
Аппаратное построение БКУ предусматривает отсутствие в бортовом контуре управления программируемой аппаратуры, что повышает надёжность КА (исключает «зависание» и невыполнение программ работы), однако треебует заранее предусмотреть все возможные ситуации (в том числе нештатные) и организовать хранение аппаратных команд для каждой ситуации. Аппаратные команды представляют собой набор реле (релейную матрицу), каждое из которых замыкает цепь управления по сигналам с конкретного датчика. Увеличение количества аппаратных команд приводит к увеличению габаритов и массы аппаратуры БКУ.
Программное построение БКУ отличается от аппаратного наличием бортового компьютера и программного обеспечения. Это позволяет экономить массу БКУ, заменяя аппаратные команды программными кодами, а также изменять команды во время функционирования КА на орбите («перепрошивать» БКУ) и организовывать самодиагностику КА средствами БКУ. Самодиагностика и наличие вычислительной аппаратуры на борту позволяют применять адаптивное управление: последовательность команд, выдаваемых в аппаратуру КА, определяется текущим состоянием этой аппаратуры. Например, адаптивное управление позволяет восстанавливать работоспособность приборов после несущественных сбоев (например, «зависание» ПО) без привлечения средств НКУ, что сокращает срок устранения неисправностей и увеличивает коээффициент готовности КА. Также программное построение позволяет изменять ПО непосреедственно на орбите, что даёт возможность парировать некоторые критичные неисправности за счёт изменения логики работы КА.
3

Состав БКУ
Бортовой цифровой вычислительный комплекс (БЦ ВК)
Блок управления (БУ БКУ) |
Блок интерфейсный (БИ БКУ) |
БКУ
Бортовая аппаратура |
Командно-измерительная |
телесигнализации (БАТС) |
система (КИС) |
Программное обеспечение (ПО БКУ)
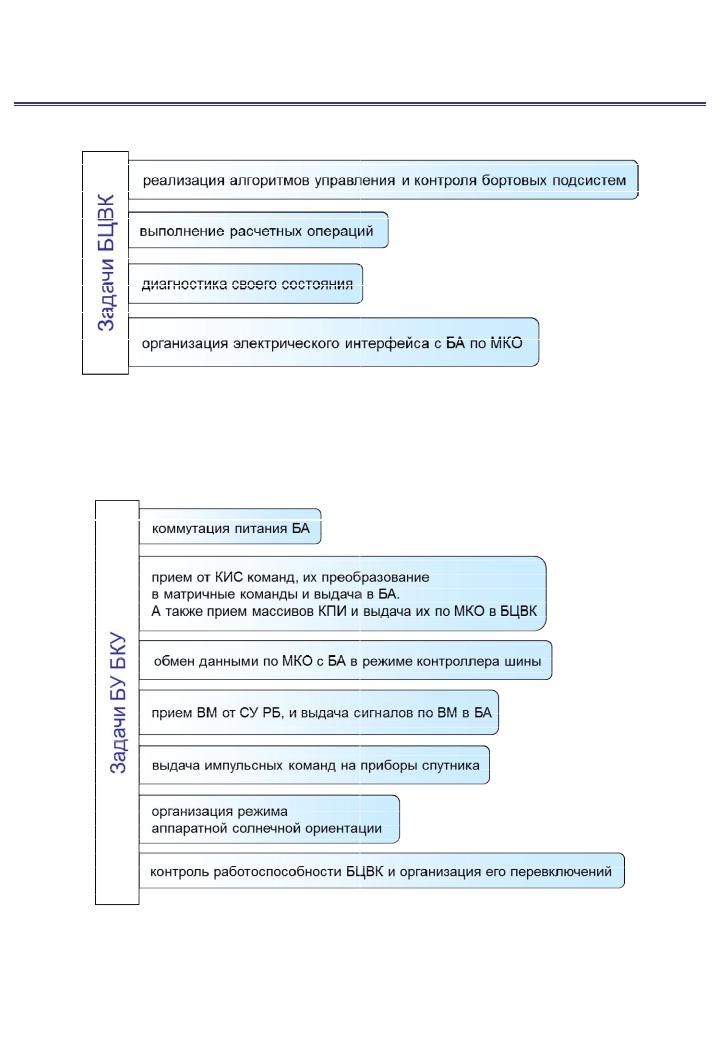
Бортовой цифровой вычислительный комплекс (БЦВК) – бортовой компьютер, «головной мозг» БКУ. Отвечает за реализацию логики работы КА и обработку цифровой информации
(«мысли»).
Блок управления (БУ БКУ) матрица аппаратных команд – «спиной мозг» БКУ. Отвечает за формирование по командам с НКУ или сигналам датчиков аппаратных (аналоговых) команд, реализующих функции обеспечения живучести и начальных режимов работы КА («рефлексы»).
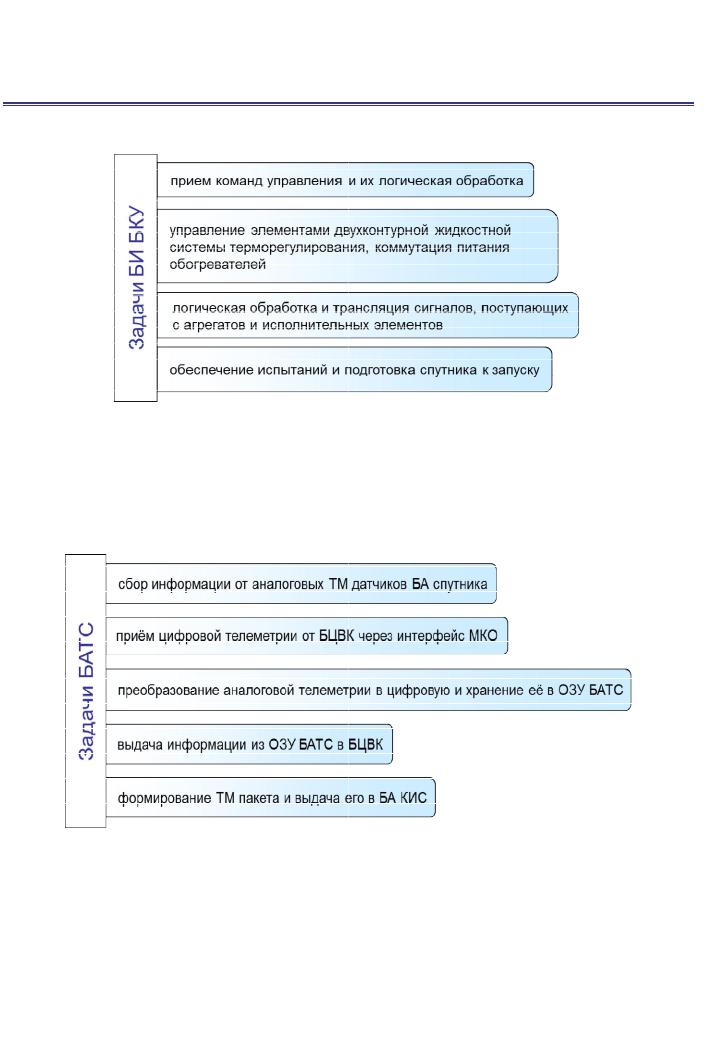
Блок интерфейсный (БИ БКУ) служит для управления электробогревателями и насосами жидкостного контура (если жидкостный контур присутствует в составе СТР) за счёт регулирования величины напряжения электрического тока, подаваемого от СЭП на это оборудование.
Бортовая аппаратура телесигнализации (БАТС) предназначена для опроса аналоговых телеметрических датчиков, оцифровки их показзаний, объединения этих показаний с цифровой телеметрией, получаемой от БЦВК, хранения телеметрии и формирования телеметрического кадра (диагностического сообщения) для НКУ.
Командно-измерительная система (КИИС) – аппаратура, посредством которой осуществляется двусторонняя связь КА с НКУ, а также производится радиоконтроль орбиты КА.
4
5
РК, КУ – команды управления; УВ – управляющие воздействия; КИ – контрольная информация; АТМ – аппаратная ТМ-информация (аналоговая, сигнальная, температурная);
ПТМ – программная ТМ-информация; СТ О – сигналы требования обмена.
Обмен информацией между подсистемами КА и БКУ, а также внутри БКУ осуществляется по единой шине – мультиплексному каналу обмена. БЦВК является контроллером МКО и управляет потоками информации, другими словами вся цифровая информация в космическом аппарате проходит через БЦВК.
Такой способ организации информационного обмена позволяет оптимизировать интерфейсы оконечных устройств – задачи маршрутизации решаются только в БЦВК – однако существуют ограничения по пропускной способности, обусловленные необходимостью постоянно задействовать вычислительные мощности БЦВК, а кроме того, надёжность всей цепи информационного обмена зависит от функционирования одного элемента – БЦВК.
МКО с БКУ схема льнаяфункциона-Структурно
Аппаратура БКУ
Бортовой цифровой вычислительный комплекс
В состав БЦВК входят два вычислительных модуля, один из которых находится в «холодном» резерве, внешнее запоминающее устройство, контроллер ввода/вывода и коммутатор электропитания.
Блок управления БКУ
Блок управления БКУ является наиболее массивным элементом БКУ, поскольку заключает в себя модуль аппаратных команд. Блок управления не должен содержать в себе элементы с программным обеспечением во избежание некорректной работы КА в режиме аппаратной солнечной ориентации (режим обесспечения живучести).
6
Аппаратура БКУ
Блок интерфейсный БКУ
Блок интерфейсный в бортовом комплекксе управления выполняет задачи, смежные с задачами системы электропитания, поскольку является контроллером шин питания управляющей аппаратуры системы терморегулиирования.
Бортовая аппаратура телесигнализации
Бортовая аппаратура телесигнализации предназначена для сбора показаний телеметрических датчиков бортовой аппаратуры КА, преобразования их в цифровой вид и выдачи этой информации во внутренний (БЦВК, для адаптивного управления) и внешний (БА КИС для передачи на НКУ) контуры управления.
7

Аппаратура БКУ
Бортовая апппаратура КИС
Бортовая аппаратура командно-измеритеельной системы необходима для организации радиолинии между КА и НКУ, а также шифрования и дешифрования (для обеспечения помехозащищённости и достоверности) радиосигналов. Поскольку БА КИС является критическим узлом в цепи управления функционированием КА, оборудование БА КИС резервируется дважды, то есть каждый прибор имеет как минимум два «дублёра», при этом один из резервных приёмопередатчиков и дешиифраторов находятся в «горячем» резерве – то есть постоянно включены, но не используются – для исключения задержки (связанной с переключением между комплектами оборудоваания) в приёме жизненно важных радиокоманд при отказе основного комплекта оборудования.
Программное обеспечение БКУ
8
Типы команд управления
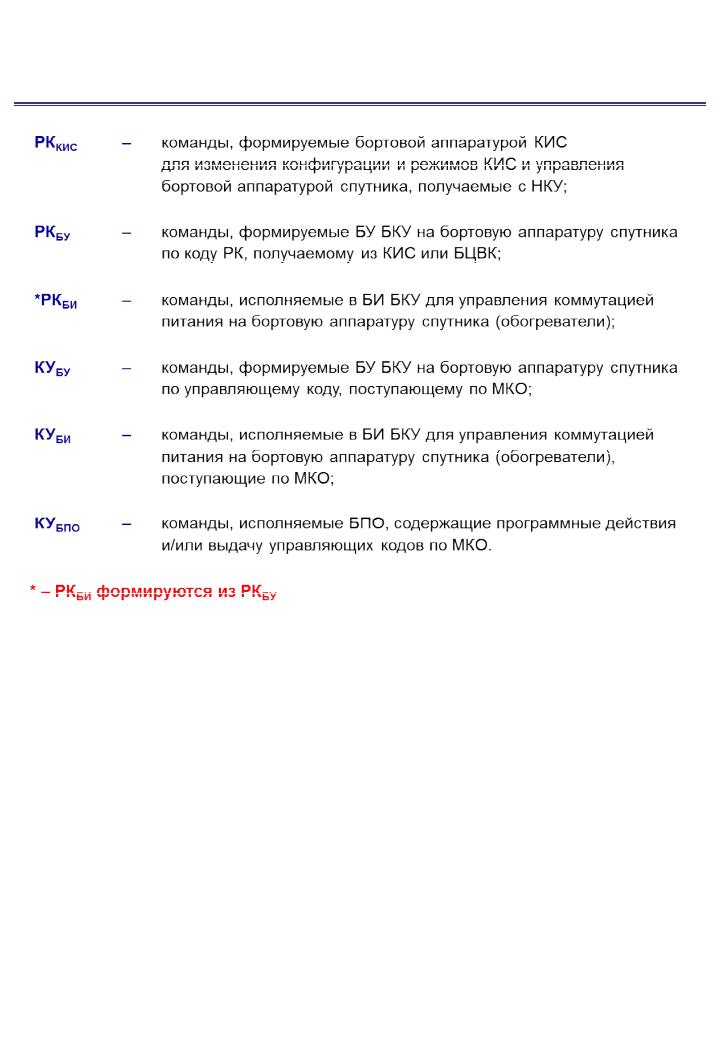
Команды типа «РК» – это радиокоманды, получаемые космическим аппаратом от НКУ.
Эти команды формируются на Земле и представляют собой код (идентификационный номер)
одной из команд, заранее заложенных в логику работы космического аппарата.
Команды типа «КУ» – программный код, формируемый непосредственно на борту КА, а
конкретнее – в БЦВК. Этот код может представлять собой как идентификационный номер заранее заложенной в логику работы КА команды, так и уникальный алгоритм,
сформированный БЦВК по результатам диагностики бортового оборудования.
9
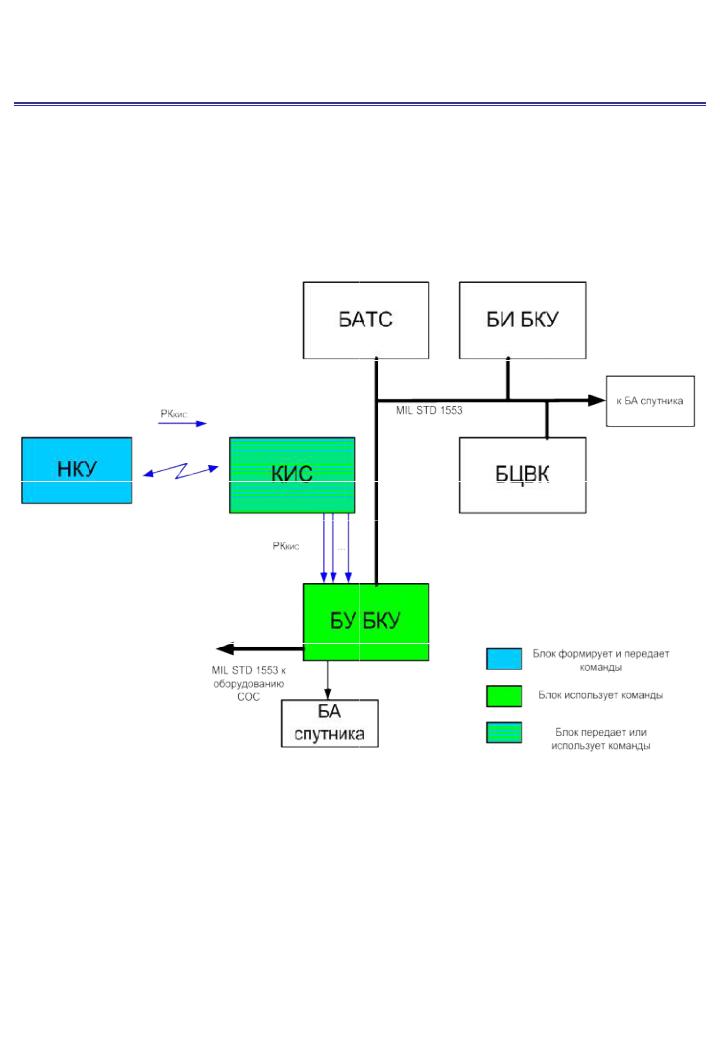
Схема пере дачи РККИС
10