

3.3 Дифференциальные (реверсивные) индуктивные датчики
Дифференциальные индуктивные датчики представляют собой совокупность двух одинарных (нереверсивных) датчиков с общим якорем. Такой датчик показан на рисунке 3.
![]()
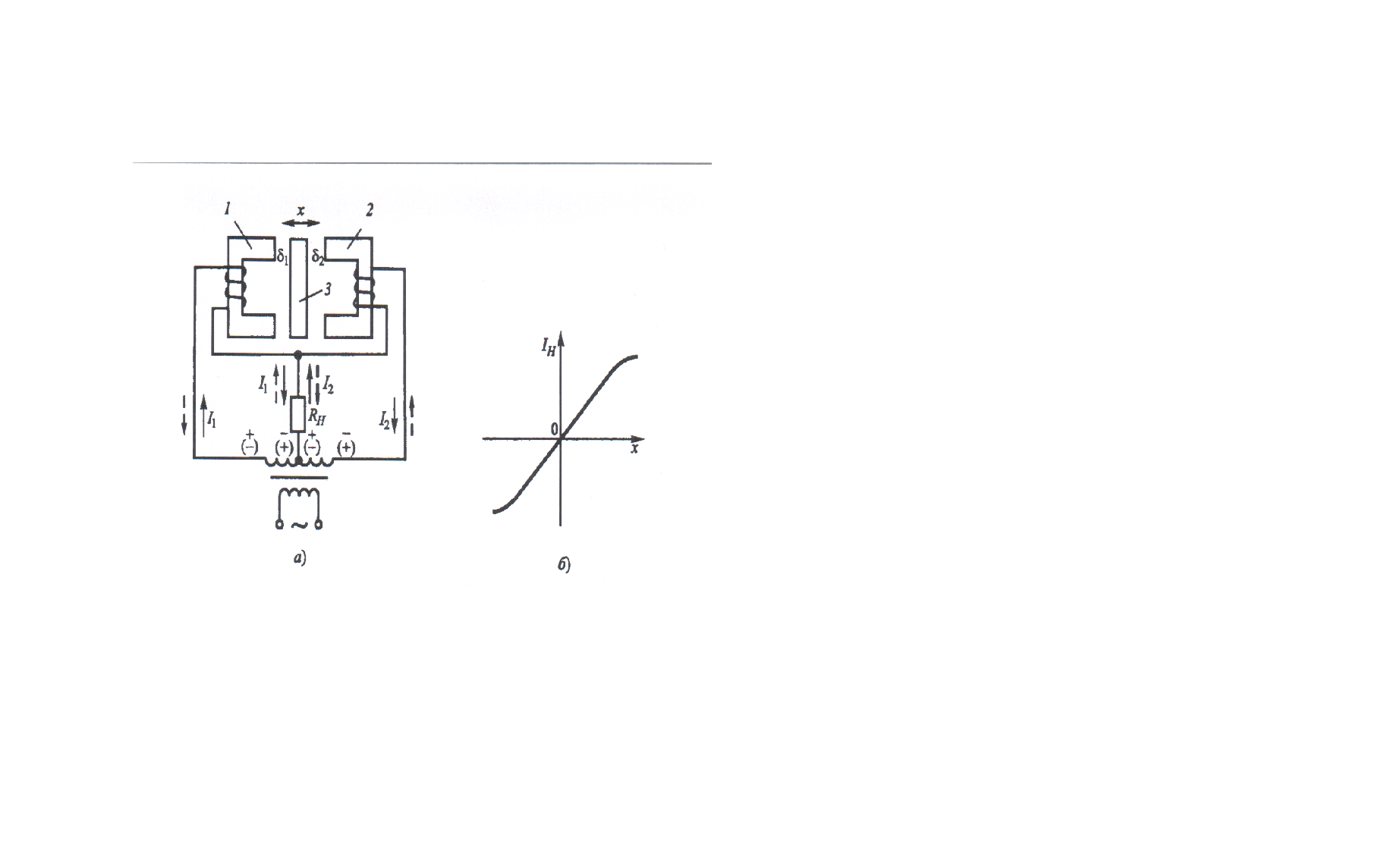
Рисунок 3
Предназначены дифференциальные индуктивные датчики для получения реверсивной статической характеристики и для компенсации электромагнитной силы притяжения якоря.
Рассмотрим работу дифференциального индуктивного датчика (рисунок 3, а), состоящего из двух одинаковых сердечников 1 и 2 с обмотками и расположенного между сердечниками якоря 3, способного перемещаться влево и вправо относительно среднего симметричного положения. Питание дифференциального датчика осуществляется от трансформатора с выводом от средней точки вторичной обмотки. Сопротивление нагрузки RН включается между этой средней точкой и общей точкой обмоток сердечников 1 и 2. Ток в сопротивлении можно представить как алгебраическую сумму двух токов: в левом и правом контурах. Каждый контур состоит из половины вторичной обмотки трансформатора, одинарного индуктивного датчика и сопротивления нагрузки RН, общего для обоих контуров.
Рассмотрим направления контурных токов в момент времени, когда во вторичной обмотке трансформатора индуцируется условно положительный полупериод напряжения: плюс – у левого зажима; минус – у правого. Полярность средней точки относительно левого зажима будет минусовая, а относительно правого – плюсовая. Принимая за положительное направление тока во внешней цепи от плюса к минусу, определяем, что ток левого контура I1 направлен сверху вниз, а ток правого контура I2 – снизу вверх. Следовательно, эти токи вычитаются, а через нагрузку пойдет разностный ток. В следующий полупериод полярность изменится на противоположную. Соответственно изменится направление токов в нагрузке, но опять ток в нагрузке будет равен разности токов I1 и I2.
При среднем (симметричном) положении якоря 3 индуктивности обмоток 1 и 2 одинаковы. Следовательно, токи I1 и I2 равны, разность их равна нулю, выходной сигнал (ток в сопротивлении нагрузки) равен нулю: IН = I1 – I2 = 0.
При перемещении якоря вправо (примем его за положительный входной сигнал) индуктивность L2 возрастает, поскольку воздушный зазор в одинарном индуктивном датчике 2 уменьшается, а индуктивность L1 убывает, поскольку зазор в датчике 1 увеличивается. Следовательно, I1> I2 и появляется выходной сигнал в виде тока нагрузки определенной полярности. При перемещении якоря влево (отрицательный входной сигнал) соответственно уменьшается L2 и увеличивается L1, соотношение токов I1< I2 и полярность тока нагрузки изменяется. Поскольку речь идет о переменном синусоидальном токе, это означает, что фаза тока изменяется на 180°. Таким образом, статическая характеристика дифференциального датчика (рисунок 3, б) будет реверсивной, зависящей от знака входного сигнала. А дифференциальным датчик называется потому, что выходной сигнал формируется как разность сигналов двух одинаковых датчиков.
Силы притяжения якоря к сердечникам возникают и в этом случае, но направлены они в противоположные стороны и поэтому почти полностью взаимно компенсируются. Поэтому для перемещения якоря требуется незначительное усилие. Очень важной особенностью дифференциального датчика является равенство нулю выходного сигнала при нулевом входном сигнале. Напомним, что в одинарном датчике выходной сигнал (ток через обмотку) был не равен нулю даже при нулевом воздушном зазоре.