

Lab2 / Литература / Описания датчиков / Шумков А., Применение датчиков давления в системах навигации
.pdfИНЖЕНЕРНАЯПРАКТИКА |
А. Шумков |
CHIP NEWS |
|
|
|
||||
|
|
|
|
|
Применение датчиков давления в системах навигации
Любой навигационной системе, установленной на летательных объектах, необходимо определять свое положение относительно поверхности Земли. Применение электронного высотомера на основании датчика давления является эффективным решением данной проблемы в большом диапазоне высот. В данной статье рассмотрена задача построения высотомера с точностью до ±0,1 м.
ВВЕДЕНИЕ |
• Истинная высота Нèñò. — отсчитыва- |
||||||||
|
ется от точки земной поверхности, |
||||||||
арометрические высотомеры исполь- |
находящейся под летающим объек- |
||||||||
Áзуются в воздухоплавании очень дав- |
òîì; |
|
|
|
|
|
|
|
|
но. Изначально это были тяжелые гро- |
• Относительная Нîòí. — от условного |
||||||||
моздкие механические приборы со стре- |
уровня (аэродрома, цели и др.); |
||||||||
лочным индикатором. Эти приборы были |
• Абсолютная Нàáñ. — от уровня моря; |
||||||||
тяжелы в настройке, имели небольшую |
• Высота эшелона Нýø. — от условно- |
||||||||
точность и не могли учитывать влияние |
го уровня, |
который |
соответствует |
||||||
температуры. Электронный высотомер |
стандартному атмосферному давле- |
||||||||
имеет огромное количество преиму- |
íèþ 760 ìì ðò. ñò. |
|
|
|
|
||||
ществ: устойчивость к вибрации и уда- |
|
|
|
|
|
|
|
|
|
рам, возможность автоматической |
|
|
|
|
|
|
|
|
|
установки на ноль, возможность автома- |
ИЗМЕНЕНИЕ АТМОСФЕРНОГО |
||||||||
тической корректировки, прямой интер- |
ДАВЛЕНИЯ С ВЫСОТОЙ |
||||||||
фейс с электронной системой навига- |
|
|
|
|
|
|
|
|
|
öèè. |
арометрический метод измерения |
||||||||
|
Áвысоты основан на использовании |
||||||||
|
закономерного изменения атмосферно- |
||||||||
ИЗМЕРЕНИЕ ВЫСОТЫ |
го давления с высотой. Зависимость |
||||||||
|
давления воздуха от высоты до 11000 м |
||||||||
ысотой полета принято называть |
выражается барометрической форму- |
||||||||
Âрасстояние до летающего объекта, |
ëîé |
|
|
|
|
|
|
|
|
отсчитанное по вертикали от некоторого |
|
|
|
|
|
|
|
|
|
уровня, принятого за начало отсчета. В |
|
|
|
|
|
|
1 |
|
|
воздухоплавании принята классифика- |
P = P |
t |
гр |
H |
|
Rtгр |
|
||
1− |
|
|
|
||||||
ция высот полета по уровню начала от- |
H |
0 |
|
|
T0 |
. |
|||
|
|
|
|
|
|||||
счета (рис. 1):
Или, выразив высоту:
|
P |
Rtгр |
T |
|
|
||
H = 1− |
H |
|
|
|
0 |
, |
|
|
|
P |
|
|
tuh |
||
|
|
0 |
|
|
ãð |
|
|
|
|
|
|||||
где R — газовая постоянная (29,27 м/град); PH — давление на высоте полета; P0 — давление на уровне начала отсчета; T0 — температура на уровне начала отсче- та; tãð — градиент изменения температуры с высотой (0,0065 град/м).
Если принять параметры P0, T0 è tãð постоянными, то проблема вычисления высоты сводится к проблеме измерения атмосферного давления.
ОСНОВЫ ИЗМЕРЕНИЯ ДАВЛЕНИЯ
Ñреди огромного множества датчи- ков давления рассмотрим интегральные полупроводниковые датчики. Они отличаются миниатюрными габаритами и малым весом, что чрезвычайно важно при применении в бортовых системах навигации летательных аппаратов. Существует несколько типов дат- чиков: датчики дифференциального дав-
|
|
|
Изменение |
|
|
|
|
Рисунок 2 |
|
|
|
|
|
атмосферного |
|
|
|
|
|
Рисунок 1 |
Классификация высот полета |
|
|
давления с высотой |
18
www.chip-news.ru
|
|
|
ИНЖЕНЕРНАЯ МИКРОЭЛЕКТРОНИКА |
|
|
ИНЖЕНЕРНАЯПРАКТИКА |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
ления, датчики вакуума, датчики избы- |
В одном из входов датчика создает- |
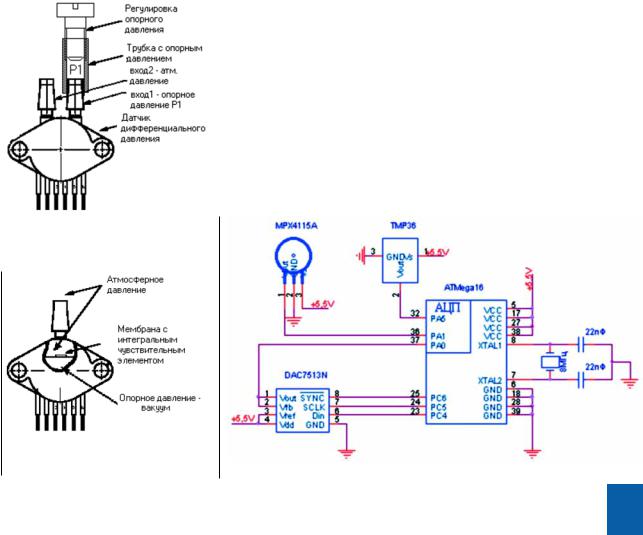
давления с диапазоном измерения от |
|||||
точного давления и датчики абсолют- |
ся опорное давление, относительно ко- |
15 до 115 кПа. Датчик имеет внутрен- |
|||||
ного давления. Первым вопросом при |
торого будут производиться измерения. |
нюю схему усиление и выходной сигнал |
|||||
проектировании высотомера стано- |
Такое устройство позволяет производить |
от 0,2 до 4,8 В. Использование датчика |
|||||
вится выбор типа датчика измерения |
механическую регулировку нуля и учи- |
со встроенной схемой усиления позво- |
|||||
давления. Как видно на рис. 2, из баро- |
тывать только необходимый диапазон |
ляет избежать проблем с температур- |
|||||
метрической формулы можно опреде- |
измерения. Но существует недостаток, |
ной компенсацией, уменьшить габариты |
|||||
лить необходимый диапазон измерения. |
из-за которого применение такой схе- |
устройства и упростить разработку. Для |
|||||
При максимальной высоте, на которой |
мы в бортовых системах становится не- |
простоты конструкции и уменьшения сто- |
|||||
действует формула (11000 м), атмосфер- |
возможным. Опорное давление в замк- |
имости изделия оцифровка выходного |
|||||
ное давление составит около 23,5 кПа |
нутом объеме трубки и входе датчика |
сигнала датчика осуществляется с по- |
|||||
(176,25 мм рт. ст.), на глубине же в 1000 м |
очень сильно изменяется с температу- |
мощью встроенного в микроконтроллер |
|||||
оно составит около 112 кПа (840 мм |
рой. Изменение эти настолько сильные |
ATMega16 10-разрядного АЦП. Встро- |
|||||
рт. ст.), при атмосферном давлении на |
и быстрые, что полезная зависимость |
енное АЦП является дифференциальным |
|||||
нулевом уровне — равном 100 кПа (750 мм |
изменения давления становится нераз- |
и имеет три уровня программируемого |
|||||
рт. ст.). Разрешающая способность по- |
личимой. |
коэффициента усиления (Ч1, Ч10, Ч200). |
|||||
лупроводниковых датчиков давления не |
Правильным является использование |
В навигационных системах требование |
|||||
отмечена в спецификациях фирм-произ- |
датчиков абсолютного давления (рис. 4). |
к точности измерения высоты различно, |
|||||
водителей (Motorola, Honeywell). Счита- |
В таких датчиках в качестве опорного |
в зависимости от высоты над поверхно- |
|||||
ется, что ограничение на разрешающую |
давления используется нулевое давле- |
стью Земли. Так, вблизи поверхности Зем- |
|||||
способность накладывается только элек- |
ние или вакуум. Его свойства не изме- |
ли требуется как можно большая точ- |
|||||
троникой. |
|
няются с температурой. Такой способ |
ность, а на значительной высоте это |
||||
|
|
|
Рассмотрим возможность примене- |
исключает возможность механической |
требование ослабевает. Наличие у |
||
ния датчиков дифференциального дав- |
настройки нуля и вынуждает учитывать |
АЦП программируемого коэффициен- |
|||||
ления для измерения высоты. На рис. 3 |
весь диапазон датчика. |
та усиления и дифференциального вхо- |
|||||
приведена измерительная схема на |
|
да позволяет осуществлять измерение |
|||||
основе датчика дифференциального дав- |
|
с различной точностью на разных высо- |
|||||
ления. |
|
КОНСТРУКЦИЯ ВЫСОТОМЕРА |
тах. Рассмотрим этот механизм более |
||||
|
|
|
|
|
|
подробно. Так как датчик измеряет аб- |
|
|
|
|
|
|
ассмотрим вариант недорогого, ком- |
солютное давление и его выход на ну- |
|
|
|
|
|
|
Ðпактного и простого в изготовлении |
левой высоте не равен нулю, а наобо- |
|
|
|
|
|
|
|||
|
|
|
|
|
электронного высотомера на базе по- |
рот, ближе к максимальному значению |
|
|
|
|
|
|
лупроводникового интегрального датчи- |
выхода (около 4 В при атмосферном дав- |
|
|
|
|
|
|
ка MPX4115A фирмы Motorola. |
лении в 100 кПа), то необходима схема |
|
|
|
|
|
|
Для построения цифрового высото- |
вычитания напряжений для использова- |
|
|
|
|
|
|
мера предлагается использовать схему |
ния программируемого коэффициента |
|
|
|
|
|
|
на рис. 5. В основе устройства лежат: |
усиления. Только тогда при усилении не |
|
|
|
|
|
|
датчик MPX4115A фирмы Motorola, дат- |
будет выхода за допустимый диапазон |
|
|
|
|
|
|
чик температуры TMP36 фирмы Analog |
напряжений АЦП. Наличие у АЦП диф- |
|
|
|
|
|
|
Devices (точность ±1°С), 8-бит микрокон- |
ференциальных входов позволяет легко |
|
|
|
|
|
|
троллер ATMega16 фирмы Atmel и ЦАП |
осуществить вычитание напряжений. В |
|
|
|
|
|
|
DAC7513N фирмы Texas Instruments. |
качестве формирователя вычитаемого |
|
|
|
|
|
|
MPX4115A — это датчик абсолютного |
напряжения рекомендуется использо- |
|
|
|
|
|
Высотомер на |
|
|
|
|
|
Рисунок 3 |
|
|
|
||
|
основе датчика |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
дифференциального давления |
|
|
|
||
|
Высотомер на |
|
|
Рисунок 4 |
|
|
|
основе датчика |
|
|
|
|
|
Схема цифрового высотомера |
|
|
|
||
абсолютного давления |
Рисунок 5 |
||
19
Chip News #8 (91), 2004