

Теплотехнические объекты управления.
Структура систем автоматического управления (сау). Виды сау.
Каждая система управления может быть представлена в форме различных структур управления, формируемых на основе разных подходов. На рис. 4.2 представлена функциональная структура системы управления.
Основными элементами структуры являются следующие блоки:
УО – управляемый объект;
ДИ – датчик информации;
УУ – управляющее устройство;
ИМ – исполнительный механизм;
ИО – исполнительный орган.

Р и с. 4.2. Функциональная структура системы управления
Базовые сигналы в системе управления:
x – результат управления, характеризующий состояние УО (выход УО);
z – задающие воздействия;
y – невязка (ошибка) управления y=z – x;
u – управляющий сигнал (вход УО);
f – возмущающие воздействия.
Каждый объект может рассматриваться в условиях статики и динамики.
Объект
находится в статическом режиме, если
его состояние и все воздействия на него
постоянны и не зависят от времени.
Статика процесса управления называется
установившимся режимом. Статической
характеристикой объекта управления
называется зависимость управляемой
величины
 от управляющего воздействия
от управляющего воздействия .
Статические характеристики могут быть:
монотонными или экстремальными.
.
Статические характеристики могут быть:
монотонными или экстремальными.
Объект управления находится в переходном режиме, если происходит процесс его пуска, останова, смены задания или режима эксплуатации.
Для
определения динамических свойств
объекта – исследуется зависимость
 при заданных изменениях внешних
воздействий
при заданных изменениях внешних
воздействий ,
, и
и .
Полученные динамические характеристики
записываются графически или в виде
дифференциальных уравнений. В зависимости
от вида дифференциальных уравнений
объекты могут быть линейными или
нелинейными.
.
Полученные динамические характеристики
записываются графически или в виде
дифференциальных уравнений. В зависимости
от вида дифференциальных уравнений
объекты могут быть линейными или
нелинейными.
Задачи систем автоматического управления.
Поддержание постоянной величины (задача стабилизации).
Задача адаптации (самонастройка параметров в соответствии с изменением внешней среды).
Задача оптимизации (достижение лучшего состояния объекта по каким-то критериям).
Поддержание экстремума ( min или max какого-то параметра).
Программное управление (задают законы изменения параметров).
Типовые виды внешних воздействий.
Существуют следующие типовые виды внешних воздействий (сигналов) на объекты управления:
Единичная функция или единичный скачок («ступенька»)
Единичный импульс
Гармонический сигнал
Непрерывный возрастающий сигнал.
Типовые звенья. Безынерционное звено.
Элементарные звенья подразделяются по реакции на типовое входное воздействие – единичную функцию. Этот метод позволяет элементы различной сложности и физической природы свести к небольшому числу типовых линейных звеньев (или их комбинаций).
Типовые звенья:
Пропорциональные (безынерционное или безусилительное)
Апериодическое звено (1 и 2 порядков)
Колебательное звено
Дифференциальное звено
Интегрирующее звено.
У запаздывающего звена начало изменения выходной величины не совпадает по времени с моментом нанесения возмущения на входе. Так, транспортное (чистое) запаздывание появляется за счет времени, необходимого для перемещения вещества от места нанесения возмущения на входе до точки измерения выходной величины.
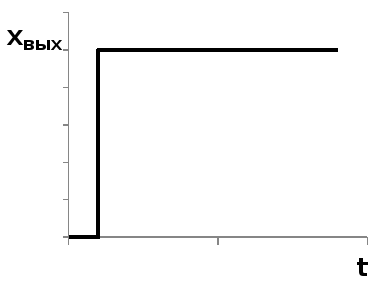
Усилительное безынерционное звено
|
|
|
 ,
,xвых=Кuвх

где
 – статический коэффициент передачи,
усиления, равный
– статический коэффициент передачи,
усиления, равный .
.
 –сигнал
на входе;
–сигнал
на входе;
 – соответствующая функция на выходе.
– соответствующая функция на выходе.