

3.1 Построение лачх и лфчх
Передаточная функция разомкнутой системы имеет вид:
W (p)=W1W2W6 Wдв ,
где W1 =kу/(Tуp+1);
W2 = kп/(Tпp+1);
W6= k/p;
Wдв =W3 W4/(1+ W3 W4W5)
Подставим в Wдв соответствующие передаточные функции и в результате получим
Wдв=kя/((Tяp+1)Jp)/1+kяk/((Tяp+1)Jp) (3)
В результате преобразования (3) получим
Wдв=kя/((Tяp+1)Jp+kяk)
Введем обозначения
kдвkя/kяk=1/0,2=5,
T2 TяJ/kяk=0.0005 ,
2TpJ/kяk=0.0125
В итоге получим, что данный двигатель является колебательным звеном с передаточной функцией
Wдв=kдв/ T2p2 +2Tp+1
Для построения ЛАЧХ и ЛФЧХ разомкнутой системы нужно построить частотные характеристики отдельных звеньев и алгебраически просуммировать их. Для упрощения построений общий коэффициент усиления разомкнутой системы, равный произведению коэффициентов усиления отдельных звеньев, т.е. kобщ = kу kп kрkдв=25*10*1*5=1250сделаем коэффициентом усиления интегрирующего звена, а коэффициенты усиления остальных звеньев сделаем равными 1
1. Таким образом, получим следующие передаточные функции:
а)W1 = 1/(Tуp + 1);
б)W2 = 1/(Tпp + 1);
в)Wдв = 1/ T2p2 + 2T + 1;
г)W6= kобщ /p
В полученные выражения подставим числовые значения и получим следующие передаточные функции:
а) W1 = 1/(0,001p + 1);
б) W2 = 1/(0,003p + 1);
в) Wдв = 1/ (0,022)2p2 + 2·0,0063·p + 1;
г) W6 = 1250/p
Так как двигатель-колебательное звено, то при построении его ЛАЧХ необходимо учитывать «горб»,чтобы точнее построить суммарную ЛАЧХ системы .
Редуктор –интегрирующее звено,следовательно 20lg40 = 32 дБ
С учетом числовых значений построим ЛАЧХ и ЛФЧХ звеньев и просуммируем их..
Исходная система устойчива в разомкнутом состоянии ,так как ЛАЧХ пересекает ось абсцисс раньше, чем ЛФЧХ пересекает линию, соответствующую фазовому сдвигу –π. Система находится в устойчивом состоянии, но не удовлетворяет заданным запасам устойчивости.
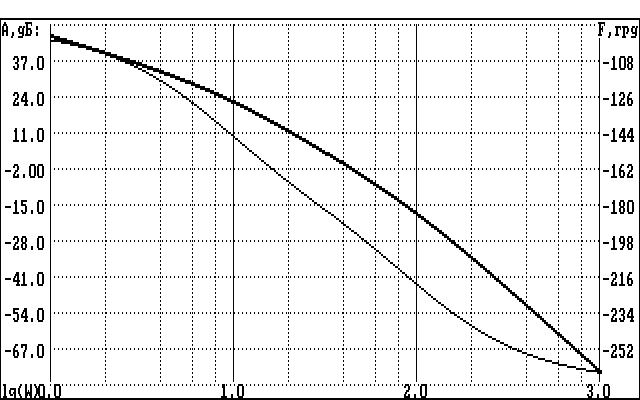
Рисунок 1 – ЛАЧХ, ЛФЧХ исходной САУ

Рисунок 2 – Переходный процесс исходной САУ
4 Синтез корректирующих устройств сау
4.1 Построение «желаемой» лачх
Так как время переходного процесса больше того, которое допустимо по поставленным условиям (переходная характеристика на странице 13), целесообразно применить последовательное включение корректирующего устройства. Корректирующее устройство включим после элемента сравнения. И синтез корректирующего устройства начнем с построения «желаемой» ЛАЧХ.
![]()
где коэффициент определяемый по номограмме в зависимости от перерегулирования. Для= 28 % = 2,4. Подставив значения и tP в формулу выше получим СР = 75. Ширину среднечастотной зоны определим из следующих условий:

Возьмем К2 = 250, тогда K1 = 23
Среднечастотную асимптоту проводим через СР с наклоном –20дб/дек.
В области высоких частот асимптоту желаемой ЛАЧХ проводим с тем же наклоном что и исходная В области низких частот асимптота желаемой ЛАЧХ совпадает с асимптотой исходной ЛАЧХ. Построение желаемой ЛАЧХ на этом завершено. Для нахождения ЛАЧХ корректирующего устройства из желаемой ЛАЧХ вычтем исходную.
Рисунок 3 – построение желаемой ЛАЧХ.

Таким образом, мы получили корректирующее устройство: интегро-дифференциальное звено 2-его порядка.
Полученное КУ можно реализовать с помощью интегро-дифференцирующих четырехполюсников с разделительным усилителем. Принципиальная схема КУ показана на рисунке 5. Сами четырехполюсники и формулы для их расчета берутся из справочника. Рассчитаем КУ.

Рисунок 4.
Принципиальная схема корректирующего
устройства
Найдем физическую реализацию данного звена:
Полученное КУ можно реализовать с помощью двух пассивных четырехполюсников постоянного тока т. к на выходе усилителя мы имеем достаточно большой сигнал, чтобы можно было его понижать введением именно пассивных четырехполюсников.
Рассчитаем параметры элементов:
Первый четырехполюсник постоянного тока:
 ;
;
![]() .
.
![]()
![]()
![]()
Возьмем С1=500 мкФ, тогда подставив его в уравнение
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Второй четырехполюсник постоянного тока:
 ;
;
![]() .
.
![]()
![]()
![]()
Возьмем
С2=100
мкФ, тогда
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
R1 R3







C1 C2


























Рисунок 12. Принципиальная схеме корректирующего устройства