

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdfего применения. Она позволяет оценить разведывательно-информационные и управляющие возможности комплекса с учетом его использования как в вари антах радиотехнического поста, воздушного пункта наведения, так и в совме щенном режиме.
1.7.Состав авиационных комплексов радиолокационного дозора и наведения и режимы их функционирования
Основным источником информации в АК РЛДН о воздушных и надвод ных (морских) целях (ВЦ) является бортовая радиолокационная станция. Подъ ем станции на авиационный носитель позволяет существенно (по сравнению с наземными РЛС) увеличить дальности обнаружения низколетящих ВЦ за счет увеличения дальности радиогоризонта. При этом условие радиовидимости це ли (Кг = 1), находящейся на малой высоте и дальности Яц относительно ком плекса, определяется условием
где |
- |
эквивалентный ра |
диус Земли, |
8ц - угол места ВЦ, Η - высота полета |
самолета-носителя |
АКРЛДН.
Подвижность БРЛС и необходимость сопровождения воздушных объектов (ВО) на фоне мощных отражений зондирующих сигналов от подстилающей поверхности определяет построение и требует специальных алгоритмов обра ботки отраженных сигналов, что приводит к наличию информационных огра ничений при обнаружении ВЦ.
Рассмотрим принципы построения комплекса РЛДН на примере раз
работанного в КР «Вега» АК А-50 с радиотехническим комплексом (РТК) «Шмель» [1]. Обобщенная структурная схема РТК, содержащая собственно БРЛС, систему государственного опознавания (СГО), системы активного за проса-ответа и передачи команд (САЗО-СПК), командную радиолинию (КРУ), бортовую вычислительную систему (БВС), бортовой комплекс средств связи (БКСС) и автоматизированные рабочие места (АРМ), представлена на рис. 1.5.
Бортовая РЛС АК РЛДН А-50 работает в импульсно-доплеровском режиме с высокой частотой повторения импульсов при обнаружении воздушных целей и в импульсном режиме с низкой частотой повторения импульсов - при обна ружении надводных целей [1].
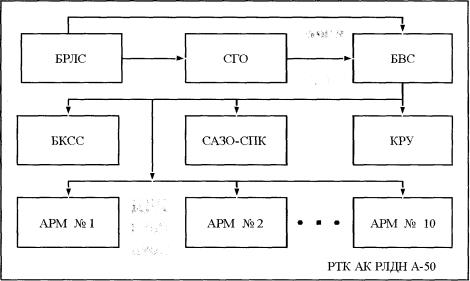
Рис. 1.5
Для рассматриваемого варианта комплекса характерны следующие ин формационные ограничения его БРЛС:
сжатие зоны обнаружения под воздействием помех по боковым лепесткам; слепой сектор в направлении хвостового оперения самолета-носителя; сжатие зоны обнаружения под воздействием помех по боковым лепесткам
в альтиметровом секторе; зона режекции целей, летящих с минимальной радиальной скоростью.
Подавление помехи, вызванной отражением зондирующих импульсов подстилающей поверхности, проводится методом частотной селекции, учиты вающим разницу доплеровских сдвигов частоты от подстилающей поверхности и от воздушной цели.
Обработка радиолокационного сигнала в БРЛС АК РЛДН А-50 комбини рованная: на первом этапе - при помощи дискретно-аналогового устройства с кварцевыми фильтрами, на втором этапе - при помощи цифровых режекторов и доплеровских фильтров (быстрое преобразование Фурье). Устройство вы полнено в виде спецвычислителя. В ЦВМ БРЛС проводятся группирование по элементам дальности отметок, относящихся к одной цели; измерение азимута и угла места; расчет однозначной дальности до цели по отметкам на двух или трех частотах повторения; формирование информации для отображения борт инженеру БРЛС и выдачи в бортовую вычислительную систему; а также авто матизированный контроль технического состояния аппаратуры РЛС.
Бортовая радиолокационная система может работать в смешанном режи ме, в котором несколько обзоров работы в квазинепрерывном режиме череду ются с обзором в обычном импульсном режиме с большой частотой повторе ния. Это позволяет вести одновременную работу по обнаружению как воздуш ных, так и надводных целей.
Антенна БРЛС АК РЛДН А-50 расположена во вращающемся вместе с ан тенной обтекателе. Связь антенны с аппаратурой, расположенной внутри фю зеляжа, осуществляется через многоканальный СВЧ-вращающийся переход и низкочастотное контактное вращающееся устройство. По такому же принципу организована связь с антеннами госопознавания и радиолиний управления.
Бортовая вычислительная система (БВС) представляет собой четырехмашинную систему. Каждая из ЦВМ под управлением операционной сис темы обеспечивает обработку данных в реальном масштабе времени. Машины БВС связаны между собой и в процессе работы обмениваются информацией. В качестве внешних абонентов на БВС замыкаются все элементы РТК: БРЛС, ап паратура госопознавания, телекодовая аппаратура радиолиний связи, аппарату ра отображения, аппаратура командных радиолиний управления и др., которые являются как информационными датчиками, так и потребителями информации.
Программное обеспечение БВС позволяет решать задачи в автоматиче ском и диалоговом с членами экипажа РТК режимах. Аппаратура РТК подклю чена к бортовой вычислительной системе таким образом, чтобы можно было продолжить работу без физических переключений в случае выхода из строя от дельных элементов.
Аппаратура отображения АК РЛДН А-50 [1] является основным элемен том рабочего места членов экипажа РТК. Формирование информации для ото бражения ее на АРМ производится с учетом индивидуальных требований чле нов экипажа РТК (масштаб отображения, вид отображения, селекция по при знакам). При помощи функциональных кнопок и цифробуквенной клавиатуры проводится ввод команд по изменению режимов работы аппаратуры отображе ния, а также команд управления решением задачи и управления аппаратурой, сопряженной с БВС.
Отображение информации на индикаторах тактической обстановки офице ров боевого управления представляет собой «подвижную картину в неподвиж ной раме», при которой вся воздушная и другая обстановка, включая отметку собственного АК РЛДН, отображается в единой системе координат относи тельно заранее определенной условной точки. Когда операторы сопровождения наблюдают первичные отметки с выхода бортовой РЛС, то их отображение может накапливаться на экране в течение некоторого регулируемого операто ром интервала времени. Поэтому на экране возникают следы трасс целей. Ложные же отметки разбросаны на экране случайным образом.
Трассовая обработка информации о целях проводится на проходе по дан ным от БРЛС и других информационных датчиков. Возможны автоматическое сопровождение целей по траекториям их движения как с автоматическим нача лом этого сопровождения (режим «Автозахват»), так и с началом сопровожде ния по командам оператора, и полуавтоматическое сопровождение, при кото ром оператор начинает сопровождение и корректирует работу автомата.
Трассовая информация о целях выдается в систему оповещения и борто вую систему управления наведением. При формировании информации опове щения АСУ, с которой взаимодействует АКРЛДН, по командам оператора возможен отбор целей по заданным признакам (например, отбор по высоте, по признаку «свой-чужой» или другим признакам). При передаче на АСУ расчет декартовых координат цели производится относительно условной точки с ис пользованием текущих декартовых координат самолета-носителя А-50, полу ченных путем пересчета его географических координат.
При передаче информации на АСУ через спутниковую радиолинию связи
вБВС проводятся расчет текущего положения спутника связи (по заложенной
впамять БВС траектории спутника) и вычисление (с учетом текущего место положения самолета А-50) пеленга на этот спутник для управления антенной спутниковой линии связи.
Бортовая система управления наведением является частью программного обеспечения БВС. Она позволяет решать задачи приборного всеракурсного на ведения истребителей-перехватчиков всех типов, находящихся на вооружении, на воздушные цели и вывода фронтовой (морской) авиации в район наземных (надводных) целей [1]. При решении этих задач проводится формирование ко манд управления, докладов и донесений о процессе наведения взаимодейст вующей АСУ. Бортовая вычислительная система и ее программное обеспече ние построены таким образом, что отказ любой из ЦВМ не приводит к отказу системы, а только снижает ее функциональные возможности.
Система активного запроса-ответа и передачи команд позволяет визировать истребители-перехватчики, оборудованные ответчиками КРУ, в целях уточне-, ния их координат для передачи на борт команд управления при наведении.
В момент визирования с борта истребителя-перехватчика может быть принята информация о состоянии его системы вооружения. Приемная часть аппаратуры САЗО-СПК, включая систему обработки принятых ответных сиг налов, скомплексирована с приемной частью аппаратуры госопознавания.
Бортовой комплекс средств связи в РТК «Шмель» представляет собой со вокупность телекодовых и оперативно-командных радиолиний KB, МВ-ДМВ и сантиметрового диапазонов волн, что обеспечивает ведение двухсторонней оперативно-командной радиосвязи в радиотелефонном режиме с КП АСУ, со седними самолетами А-50, истребителями, а также обмен телекодовой инфор мацией. Антенны средств связи расположены в различных точках самолета, что позволяет получить наилучшую электромагнитную совместимость.
Для успешного решения широкого спектра задач разведывательноинформационного обеспечения по воздушным и надводным целям в АК РЛДН используются следующие режимы.
1. Режим высокой частоты повторения импульсов, являющийся основным режимом БРЛС комплекса. Он характеризуется частотой повторения импульсов
10...30 кГц с вобуляцией частоты повторения в пределах одной азимутальной пачки для устранения неоднозначности по дальности. Обеспечивает обнаружение воздушных целей над любыми видами подстилающей поверхности и однозначное измерение скорости при высокой точности определения азимута. Недостатками режима являются возникновение комбинаторных отметок на ложных дальностях со снижением вероятности обнаружения отметок на истинных дальностях при на личии нескольких целей в пределах азимутальной пачки и энергетические потери на устранение неоднозначности по дальности.
2.Режим с низкой частотой повторения импульсов, характеризуемый вы сокой точностью и однозначностью определения дальности воздушных целей. Режим позволяет обеспечить повышенную дальность обнаружения загоризонтных воздушных целей. При сжатии импульсов обеспечиваются разрешение от дельных целей в группе и необходимая средняя мощность излучения. Однако режим не обеспечивает подавления отражений от сложных подстилающих по верхностей, поэтому обнаруживает только цели, находящиеся за горизонтом.
3.Режим низкой частоты повторения импульсов БРЛС для обнаружения мор ских (надводных) целей в пределах радиогоризонта. Для уменьшения влияния от ражений от взволнованной морской поверхности используются достаточно широ кополосные сигналы с высокой разрешающей способностью по дальности. Режим обеспечивает высокую точность и однозначность измерения дальности. Недостат ком режима является невозможность обнаружения наземных целей.
4.Режим пассивной локации, позволяющий пеленговать постановщики активных помех (ПАП) главным лучом с компенсацией приема по боковым ле песткам диаграммы направленности антенны БРЛС.
Возможно использование комбинированных режимов, например второго и третьего.
Основными отличительными характеристиками структуры РТК А-50 яв ляются следующие [5]:
мощное бортовое когерентное радиолокационное передающее устройство, обеспечивающее формирование квазинепрерывных зондирующих сигналов;
система приема и обработки отраженных от цели сигналов, способная ре шать задачи обнаружения и автоматического сопровождения воздушных целей во всем современном диапазоне их полета и надводных целей вплоть до радио горизонта;
вращающаяся в большом (десятиметровом) обтекателе над фюзеляжем самолета антенна кругового обзора, создающая управляемый луч, необходи мый для решения задач обнаружения и сопровождения ВЦ;
цифровой вычислительный бортовой комплекс, по своей мощности сопос тавимый на период создания АК РЛДН с наземными вычислительными цен трами. Это позволило создать бортовую автоматизированную систему управ ления силами и средствами перехвата воздушных целей;
комплекс оперативно-командных радиолинии и многоканальные системы дальней связи, включая спутниковые.
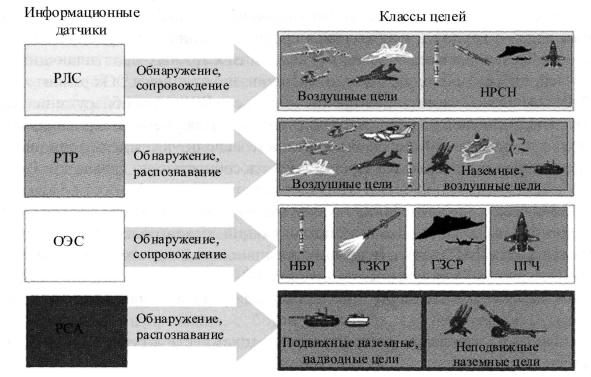
Для расширения разведывательно-информационных возможностей, уве личения числа классов и типов обнаруживаемых целей в составе перспектив ных АК РЛДН целесообразно использовать не один, а несколько информаци онных датчиков (рис. 1.6), в том числе станцию радиотехнической разведки (РТР), оптико-электронную станцию (ОЭС), радиолокатор с синтезированием апертуры (PCА). Это позволяет повысить уровень многофункциональности комплекса, устойчивость обнаружения и сопровождение различных типов и классов целей, а также улучшить условия их распознавания.
Рис 1.6
Большие скорости и высоты полета нового класса целей для АК РЛДН, ко торыми являются воздушно-космические цели и нестратегические баллистиче ские ракеты (НБР), ограниченное время работы двигательной установки (нахож дения на активном участке), применение комплексов средств преодоления ПВО затрудняют обнаружение и сопровождение данного класса целей. Поэтому в перспективные комплексы целесообразно внедрять оптико-электронную систему с лазерным дальномером (рис. 1.6) и БРЛС с использованием специальных ре жимов обработки и комплексирования информации. Это позволит обеспечить устойчивое обнаружение и сопровождение НБР при различных условиях наблю даемости их на траекториях полета в сложных условиях ракетной обстановки.

Подсистемы и функциональные связи ОЭС и БРЛС в составе АК РЛДН показаны на рис. 1.7.
Рис. 1.7
Для достижения высоких разведывательно-информационных и управ ляющих возможностей РТК АК РЛДН должен быть многофункциональным и использовать несколько информационных датчиков и режимы комплексирования и совместной обработки информации.
Литература
1.Бабич В. К, Баханов Л. Е., Карпеев В. И. и др. Авиация ПВО России и научно-технический прогресс. Боевые комплексы и системы вчера, сегодня, завтра. / Под ред. Е. А. Федосова. - М.: Дрофа, 2001.
2.Вайпан С. К, Вакуленко Α. Α., Кузьмин Г. В., Яголъников С. В. Метод конфликтно-устой чивого выбора режима функционирования радиотехнического комплекса в изменяющихся условиях. - Радиотехника, 1996, №11 .
3.Вайпан С. 77., Вакуленко Α. Α., Рюмшин А. Р. и др. Выбор показателя эффективности для син теза многофункциональных систем. - Радиотехника, 1997, №11 .
4.Верба В. С. Метод управления информативностью авиационного комплекса, взаимодейст вующего с разнородными потребителями информации. - Радиотехника, 2006, № 1.
5.Верба В. С. Тенденции развития авиационных и космических средств информационной раз ведки и дозора. - Наукоемкие технологии, 2004, №№ 8,9.
6.Верба В. С, Вакуленко Α. Α., Дод В. 77. Принципы управления многофункциональными ин тегрированными радиоэлектронными системами в динамике конфликта со средствами радио электронного подавления. - Радиотехника, 2005, № 5.
7.Гандурин В. Α., Кирсанов А. 77. Особенности зоны обнаружения низколетящих воздушных объектов доплеровской радиолокационной станции. - Радиотехника, 2007, № 10.
8.Реутов А. 77. Радиопромышленность. - Наукоемкие технологии, 2006, № 7-8.
ГЛАВА 2
ПРИНЦИПЫ ПОСТРОЕНИЯ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ АВИАЦИОННОГО КОМПЛЕКСА РАДИОЛОКАЦИОННОГО ДОЗОРА И НАВЕДЕНИЯ
2.1. Функциональные задачи и структурная схема бортовой радиолокационной системы
Комплекс АК РЛДН А-50М (НПО «Вега») и аналогичный комплекс АВАКС ЕЗА (Боинг) используют БРЛС в качестве основного источника ин формации для решения задач контроля воздушной и надводной обстановки:
на любом ТВД; круглогодично; круглосуточно;
независимо от погодных условий и естественной освещенности, наличия дыма и пыли;
непрерывно либо с заданной частотой обращения; на больших удалениях и в широкой зоне наблюдения (зоне ответственно
сти), в том числе вне зоны ПВО противника; скрытно от противника;
вусловиях радиоэлектронной борьбы (РЭБ), с учетом электромагнитной совместимости (ЭМС);
вреальном масштабе времени с передачей данных на КП и наводимые са молеты.
Радиолокационная система многофункционального комплекса должна обеспечивать решение множества разнородных задач, часть из которых особо сложные, что предъявляет ряд высоких требований к аппаратной части и про граммному обеспечению.
Основные функциональные задачи, решаемыми БРЛС в настоящее время, [5,9,13,14,16]. "
1. Обнаружение воздушных целей, в том числе низколетящих, малораз мерных, малозаметных (крылатые ракеты, вертолеты, летательные аппараты (ЛА), выполненные по технологии СТЭЛС, беспилотные летательные аппара ты (БЛА)) на фоне земной поверхности на больших дальностях, вплоть до
радиогоризонта. Типовыми характеристиками комплексов типа АВАКС (РЛДН) при решении этих задач являются:
зона обзора по азимуту - круговая, с равномерным просмотром за Тобз=10 с ;
зона обзора по углу места (+5...15°) с просмотром многолучевой либо со сканированием однолучевой диаграммой направленности антенны;
скорость полета целей 100.. .4000 км/ч; дальность обнаружения низколетящих целей:
сац =3...10 м2: 300...350 км
сац =0,5...1,0 м2: 200...250 км.
2.Оценка координат обнаруженных целей:
точность измерения координат азимута σΘ = 0,5°, угла места σφ = 5°, даль ности σΓ= 100 м.
3. Разрешение групповых целей:
по азимуту σΘ = 1,0°, по углу места σφ = 5°; по дальности σΓ = 150 м.
4.Обнаружение воздушных целей в свободном пространстве (загоризонт-
ные цели):
дальность обнаружения <зц = 30.. .60 м2: 550.. .650 км; разрешение и точность такие же, как и по низколетящим целям.
5.Обнаружение морских (надводных) целей во всей зоне ответственности (до радиогоризонта) при любой степени волнения моря, определение коорди нат и селекции движущихся целей:
дальность обнаружения катера (ац = 50... 100 м ) в штиль до радиогори зонта при волнении пять баллов: 300.. .350 км;
точность измерения координат: азимута σΘ = 0,5°, дальности σΓ = 30 м.
6.Радиотехническая разведка в частотном диапазоне РЛС, пеленгация ис точников помех.
Полученные данные обнаружения целей и оценки их координат исполь зуются в системе вторичной обработки для сопровождения целей и формиро вания команд наведения на цель.
Решение перечисленных функциональных задач потребовало разработки многофункциональной, многорежимной импульсно-доплеровской (когерентноимпульсной) БРЛС [10,13].
Под когерентностью импульсно-доплеровского радиолокационного тракта понимается априорное знание закона изменения фазы отраженного целью сиг нала от одного импульса к другому в пачке импульсов. Линейное изменение фазы соответствует доплеровской частоте сигнала, пропорциональной ради альной скорости движения цели.
Различие доплеровских частот сигналов движущейся цели и неподвижно го фона позволяет селектировать (выделять) движущиеся цели, наблюдаемые на фоне земной поверхности.
Узкополосная доплеровская фильтрация отраженных сигналов соответст вует накоплению энергии сигнала цели и повышению отношения сигнал/шум.
Дискриминатор доплеровской частоты сигнала позволяет оценивать сдвиг частоты, обусловленный движением цели, и определять с высокой точностью скорость сближения (удаления) цели относительно БРЛС.
Высокое разрешение сигналов по доплеровской частоте определяет воз можность разрешения целей в группе по различию их радиальных скоростей.
Высокая помехозащищенность БРЛС обеспечивается не только сверхниз ким уровнем боковых лепестков диаграммы направленности антенны, но и по давлением (селекцией) пассивных помех (облаков дипольных отражателей) и активных шумовых помех за счет узкополосной доплеровской фильтрации принимаемых сигналов.
Импульсный характер излучения импульсно-доплеровской БРЛС позволя ет измерять дальность до цели по величине задержки отраженного импульса и использовать единую антенну на передачу и прием.
В зависимости от максимальной дальности и радиальной скорости целей в импульсно-доплеровской БРЛС различают три режима частот повторения им пульсов.
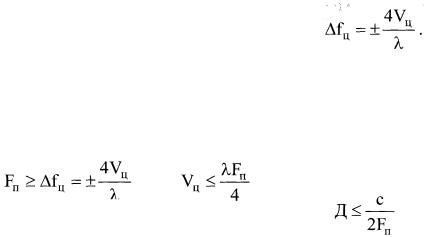
Режим высокой частоты повторения (ВЧП) обеспечивает однозначное измерение радиальной скорости цели Уц. Доплеровская частота сигнала цели
 , где знак «+» соответствует сближению цели с БРЛС, а знак «-» -
, где знак «+» соответствует сближению цели с БРЛС, а знак «-» -
удалению. Следовательно, полоса частот |
С учетом того, что на |
каждом периоде повторения импульсов БРЛС фазовый детектор формирует два независимых отсчета (синусную (sin) и косинусную (cos) составляющие сигна ла), для однозначного соответствия радиальной скорости цели и частоты бие ний сигналов фазового детектора согласно теореме отсчетов необходимо, что
бы |
или |
. При этом условие однозначного соответст |
|
вия задержки |
сигнала и |
дальности цели |
не выполняется, так как |
высокие скорости воздушных целей определяют необходимость использования высоких частот повторения. Для устранения неоднозначности измерения даль ности цели используются дополнительные режимы излучения на нескольких различных частотах повторения.
Режим низкой частоты повторения (НЧП) обеспечивает однозначное измерение дальности цели и неоднозначное измерение скорости. Такой режим используется для наблюдения загоризонтных и надводных целей, когда отра женные сигналы от подстилающей поверхности отсутствуют или они малы.