

Сопротивление материалов / Ikrin - Soprotivleniye materialov s elementami uprugosti 2004
.pdfсопротивления упругая система, выведенная из состояния покоя и |
|||||||
предоставленная самой себе, будет совершать простые гармониче- |
|||||||
ские колебания (рис. 14.9). |
|
|
|
|
|||
Характеристиками этих колебаний являются |
|
||||||
ϕ /ω |
|
|
|
|
− |
амплитуда A, |
|
|
|
|
t |
− |
круговая частота ω , |
||
|
|
|
|
||||
|
|
T |
|
|
− |
начальная фаза ϕ . |
|
A v |
|
|
Постоянные интегриро- |
||||
Рис. 14.9 |
вания |
A и ϕ |
определяются |
||||
|
|
начальными условиями. |
|||||
|
|
|
|
||||
Согласно введенному выше обозначению круговая частота |
|||||||
|
|
|
ω = √с/m. |
|
|
(14.4) |
|
Период колебаний |
T = 2π /ω . |
|
|
(14.5) |
|||
Небезынтересно влияние параметров системы на характеристи- |
|||||||
ки колебаний. Формулы (14.4) и (14.5) показывают, что |
|
||||||
− |
с ростом массы тела снижается частота колебаний; |
||||||
− |
увеличение жесткости упругой системы повышает частоту. |
||||||
|
Противоборствующими факторами, определяющими и под- |
||||||
держивающими колебательное движение, являются силы инерции и |
|||||||
силы упругости. В процессе смены их соотношения происходит из- |
|||||||
менение характера и направления движения. |
|
|
|||||
Пример 14.7. Посередине |
стальной балки длиной l = 6 м из |
||||||
двутавра № 50 закреплен груз массой m = 14300 кг (рис. 14.10 а). |
|||||||
а) |
|
m |
|
В результате удара он получил на- |
|||
|
|
|
|
|
|
. |
|
l/2 |
l/2 |
чальную скорость v = 0,7 м/с. |
|||||
Пренебрегая массой балки, найдем |
|||||||
б) |
|
F |
− |
частоту, период и амплитуду сво- |
|||
|
|
бодных колебаний; |
|
|
|||
|
|
f |
− |
диапазоны изменения прогибов под |
|||
|
|
грузом и maxσ z в балке. |
|
||||
|
Рис. 14.10 |
|
|||||
|
Согласно формуле (7.26 при b = l/2) |
||||||
прогиб под силой f = Fl3 /(48EJx). Коэффициент жесткости (14.1) |
|||||||
|
cy = F/f = 48EJx/l3 |
= 48 2 108 39727 10− 8/63 = 17660 кН/м. |
|||||
Круговая частота свободных колебаний (14.4) |
|
||||||
|
|
ω = √с/m = √17660/14,3 = 35 1/c. |
|
||||
Период колебаний (14.6) T = 2π /ω = 2 3,14/35 = 0,179 с. Уравнение свободных колебаний (14.4) v = Asin(ω t + ϕ ).
Примем за начало отсчета времени тот момент, когда груз получил силовой импульс. В этом случае начальные условия: переме-
щение v(0) = 0; скорость v. (0) = 0,7 м/с. Из первого условия следует:
Asinϕ = 0, откуда ϕ = 0.
Скорость движения v. = Aω cos(ω t+ϕ ). Второе условие приводит
к равенству v.(0) = Aω , т.е. A = v.(0)/ω = 0,7/35 = 0,02 м = 2 см.
Статический прогиб от груза
vst = mg/c = 14300 9,81 10− 3/17660 = 0,0079 м = 0,79 см.
Таким образом, прогиб будет изменяться в диапазоне
vst −+A − от 0,79 − 2 =− 1,21 см до 0,79 + 2 = 2,79 см.
При статическом действии груза напряжения в среднем сечении maxσ stz = maxMx/Wx= mgl/(4Wx) = 140 600/(4 1589) = 13,2 кН/см2.
Поскольку в рассматриваемом варианте теории колебаний одноименные эпюры в статическом и динамическом состояниях подобны и отличающимися лишь масштабным коэффициентом, диапазоны изменения напряжений и прогибов под силой аналогичны.
Если прогибы посередине балки колеблются от
vst − A = (1 − A/vst) vst = (1 − 2/0,79)vst = − 1,53vst до vst+A=(1 + A/vst) vst = (1 + 2/0,79)vst = 3,53vst,
то и напряжения в рассматриваемых точках будут изменяться от
− 1,53 maxσ stz = − 1,53 13,2 = − 20,2 кН/см2 до 3,53 maxσ stz = 3,53 13,2 = 46,6 кН/см2.
|
14.4.1.2. Свободные колебания |
|
|
|||||
|
при сопротивлении, пропорциональном скорости |
|
||||||
На рис. 14.11 а ... в изображена упругая система |
|
|
||||||
− |
в недеформированном |
а) |
б) |
в) |
г) |
Fel |
||
состоянии (рис. 14.11 а); |
|
|
|
|
Fres |
|||
− |
в состоянии |
статиче- |
|
|
|
vst |
||
|
|
|
Fin |
|||||
ского |
равновесия |
с |
телом |
|
|
|
v |
|
массой m (рис. 14.11 б); |
|
|
|
|
|
|||
|
|
|
|
|
|
|||
− |
в произвольный мо- |
|
|
|
|
mg |
||
мент времени (рис. 14.11 в); |
|
|
|
|
||||
|
|
|
Рис. 14.11 |
|||||
|
|
|
|
|
|
|
||
280 |
281 |

Силы, действующие на движущееся тело в произвольный мо-
..
мент времени показаны на рис. 14.11 г: инерции Fin= mv, упругости Fe = с(vs + v) и сопротивления1 Fres, отражающая потери энергии, связанные с внешним и внутренним трением, препятствием среды и т.п. Природа процессов, обуславливающих рассеяние энергии при движении, сложна и не всегда ясна. Обычно силу сопротивления счита-
ют пропорциональной скорости движения v. : Fres = r v. (r − коэффи-
циент сопротивления, имеющий размерность Нс/м).
Условие равновесия Fin |
+ Fres + Fel − mg = 0 принимает вид |
||
дифференциального уравнения |
.. |
. |
− mg = 0. Обозна- |
mv |
+ rv + с(vst+ v) |
||
чив r/m = 2α и c/m = ω 2, а также учитывая равенство сvst = mg, приходим к канонической форме
v.. + 2α v. + ω 2v = 0. |
(14.6) |
Характеристическое уравнение имеет вид |
Z2 + 2α Z + ω 2v = 0. |
Корни характеристического уравнения Z1,2 = −αα ±± √α 2 − |
ω 2. Общее |
|
решение |
v=B1 e Z1t + B2 e Z2t . |
(14.7) |
Рассмотрим частные случаи, поскольку здесь возможны две качественно различные ситуации: α<< ω и α ≥≥ ω .
Первая ситуация: α<< ω (сила сопротивления мала).
В этом случае решение уравнения (14.6) принимает вид
|
α<< ω |
v = e− α t (C1 sinω rt + C2 cosω rt). |
|
|
|
После замены постоян- |
|
|
|
t |
|
|
|
ных C1 и C2 на Ar и ϕ r его |
|
|
Tr |
|
можно записать так: |
v |
v = Ar e− α tsin(ω r t + ϕ r). (12.8) |
||
Рис. 14.12 |
В рассматриваемом случае |
||
тело также совершает колебания. Но эти колебания затухающие |
|||
(рис. 14.12). Амплитуда со временем уменьшается. В итоге система |
|||
практически останавливается в положении статического равновесия. |
|||
|
Круговая частота колебаний |
|
|
|
|
ω r = √ ω 2− α 2 |
(14.9) |
меньше чем при колебаниях без сопротивления. Период − больше: |
|||
______________________________________ |
Tr = 2π /ω r. |
(14.10) |
|
1 Индекс от англ. resistance − |
сопротивление. |
|
|
282 |
|
|
|
Факт затухания колебательного процесса определяется множителем e− α t в выражении (14.8). Чем больше α , тем выше скорость уменьшения амплитуд. По этой причине α носит название коэффи-
циента затухания.
В литературе по динамике сооружений приведены такие данные: для стальных мостов α = (0,018 ... 0,08)ω r ; для деревянных α
= (0,022 ... 0,01)ω r ; железобетонных α = (0,032 ... 0,016)ω r. При ди-
намических расчетах сооружений на грунтовых основаниях (сейсмостойкость сооружений; вибрацию фундаментов) α = (0,4 ...
... 0,06)ω r. Для большинства строительных конструкций α<< ω . Свободные колебаний затухают.
Учитывая слабое влияние α на ω r, в практических расчетах строительных конструкций обычно принимают ω r ≈ ω, Τr ≈Τ.
Количественной мерой скорости затухания колебаний является
отношение отклонений тела в два момента, отличающихся на пери-
од: v(t)/v(t +T) = Are− α tsin(ω r t+ϕ r)/(Are− α (t+T)sin(ω r (t +Τ)+ϕ r)) = e α T.
Отсюда ln(v(t)/v(t+T)) = α T. Обозначим
α T = dln. |
(14.11) |
В теории колебаний dln носит название1 логарифмическкого декре-
мента затухания.
Для формирования количественного представления о затухающих колебательных процессах приведем пример.
Пример 14.8. Обратимся к балке, рассмотренной в предыдущем примере 14.7. Определим, как скоро затухнут колебания, возникшие в ней. Логарифмический декремент затухания от рассеяния энергии в балке dln= 0,085. Колебания примем прекратившимися, если амплитуда уменьшилась в 10 раз.
Отношение амплитуд в моменты времени, отличающиеся на период, Ar (t)/Ar (t+T) = e dln = e 0,085 = 1,089. Через n периодов отно-
шение амплитуд Ar (t)/Ar (t + nT ) = 1,089n. Колебания затухнут (в оговоренном выше смысле), если 1,089n ≥ 10. Отсюда n > 27. Приняв период колебаний Tr = 0,179 c, находим время возвращения балки к статическому состоянию nTr= 27 0,179 ≈ 5 c.
______________________________________
1 От англ. decrement − уменьшение.
283

Вторая ситуация: α ≥≥ ω .
Если силы сопротивления велики, так что α ≥≥ ω , колебания не
|
α ≥≥ ω |
t |
возникают. Тело, |
получившее |
|
|
импульс, вначале |
по инерции |
|
|
|
|
отклоняется от исходного по- |
|
v |
Рис. 14.13 |
|
ложения (участок роста пере- |
|
мещения на рис. 14.13), затем монотонно возвращается обратно под действием сил упругости (асимптотическая ветвь на рисунке).
Предпосылка о том, что сила сопротивления пропорциональна скорости движения тела, обусловлена возможностью привлечения к количественному анализу простого дифференциального уравнения (14.6). Между тем во многих случаях сопротивление среды весьма неопределенно и многофакторно. Математические сложности, возникающие при уточнении влияния сил сопротивления на характер движения, серьезно затрудняют анализ колебательных процессов. Поэтому практические оценки обычно базируются на полученных выше качественных и количественных соотношениях.
|
|
14.4.2. Вынужденные колебания |
|
|
|
||||
Колебания, происходящие под действием переменных во вре- |
|||||||||
мени сил, носят название вынужденных. |
|
|
|
|
|||||
Рассмотрим |
поведение упругой |
конструкции, |
подверженной |
||||||
а) |
б) |
в) |
г) |
Fel |
переменной во времени силе |
||||
|
|
|
|
Fres |
F = F(t). На рис. 14.14 изо- |
||||
|
|
F |
vst |
бражены: |
|
|
|
||
|
|
|
v |
Fin |
− |
модель конструкции в |
|||
|
|
|
|
ненапряженном |
состоянии |
||||
|
|
|
|
|
|||||
|
|
|
|
mg |
(рис. 14.14 а); |
|
состоянии |
||
|
|
|
|
F |
− |
она же в |
|||
|
|
|
|
статического |
равновесия |
с |
|||
− |
Рис. 14.14 |
|
|
грузом (рис. 14.14 б); |
|
||||
|
|
|
|
|
|
|
|||
движущееся тело в произвольный момент t (рис. 14.14 в); |
|
||||||||
− |
силы, действующие на тело в это мгновение (г). |
|
|
||||||
Условие динамического равновесия F + mg − Fin − |
Fres − Fel = 0 |
||||||||
после преобразований, аналогичных приведенным выше, принимает |
|||||||||
вид |
|
.. |
|
. |
|
|
|
(14.12) |
|
|
v |
+ 2α v + ω 2v = F/m. |
|
|
|
||||
284 |
|
|
|
|
|
|
|
|
|
Общее решение уравнения (14.12) состоит из двух частей:
v = vgen+ vpar, (14.13)
где vgen − общее решение однородного уравнения; vpar − частное решение уравнения (14.12)1.
Общее решение vgen получено выше. Оно описывает затухающие свободные колебания (14.8). Частное решение vpar зависит от вида функции F = F(t). Таким образом, при действии возмущающей силы тело совершает одновременно два движения. Одно из них − собственные колебания, другое определяется характером изменения силы.
Изучение видов движения при действии переменной силы начнем с наиболее простого и распространенного случая.
14.4.2.1. Колебания при действии гармонической силы
Пусть возмущающая сила изменяется по гармоническому зако-
ну |
F = Fasinθ t, |
(а) |
где Fa − |
амплитудное значение силы F; |
|
θ− круговая частота ее изменения.
Частное решение уравнения (14.12) в этом случае имеет вид
vpar = D1 sinθ t + D2 cosθ t.
Постоянные D1 и D2 после подстановки vpar в уравнение (14.12) и приравнивания коэффициентов при одинаковых функциях выра-
жаются так: |
D1 = Fa(ω 2−θθ 2)/(m((ω 2−θθ 2)2+4α |
2θ 2)); |
|
||||
|
D2 =− 2αθ Fa/(m((ω 2−θθ 2)2+4α |
2θ 2)). |
(б) |
||||
Введя обозначение |
D2 /D1 = tgψ , |
|
|
(в) |
|||
частному решению можно придать вид |
|
|
|
||||
|
|
vpar= Af sin(θ t + ψ ), |
|
|
(14.14) |
||
где амплитуда вынужденных колебаний2 |
|
|
|
||||
|
Af = Fa/(mω 2√ |
|
. |
(г) |
|||
|
(1−θθ 2/ω 2)2+4α 2θ 2/ω 4) |
||||||
Уравнение движения тела − |
|
|
|
|
|||
|
v = Are− α tsin(ω rt + ϕ r) + Af sin(θ t + ψ ). |
(14.15) |
|||||
______________________________________ |
|
|
|
|
|
|
|
1 Индексы от англ. general − |
общий; |
particular − частный. |
|
||||
2 Индекс от англ. forced oscillation − |
вынужденные колебания. |
|
|||||
285
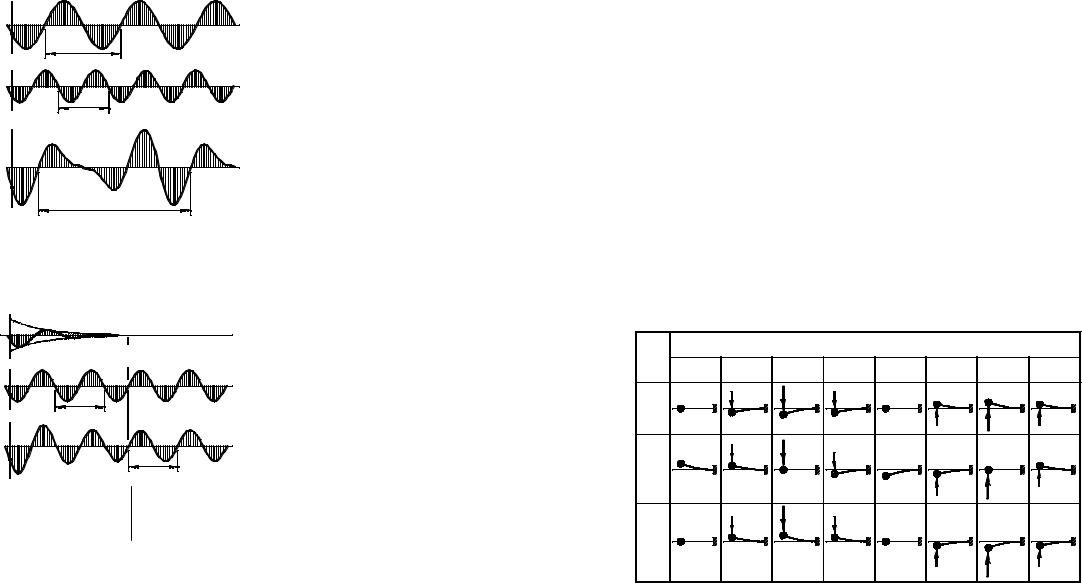
При действии гармонической возмущающей силы тело совер- |
|||||||||||
шает периодическое движение, состоящее из |
|
|
|
||||||||
|
vn = Ansin(ω t + ϕ ) |
|
|
− |
собственных колебаний с |
||||||
|
|
|
|
t |
частотой ω r, амплитудой Ar и |
||||||
|
|
|
|
начальной фазой ϕ |
r; |
|
|||||
vn |
Tn |
|
|
|
− |
колебаний с |
частотой |
||||
|
vF = Af sin(θ t + ψ |
) |
возмущающей силы θ , ампли- |
||||||||
|
|
|
|
t тудой Af и начальной фазой ψ . |
|||||||
|
TF |
|
|
|
|
На |
рис. 14.15 показаны |
||||
vF vf = An sin(ω t + ϕ ) + Af sin(θ t + ψ |
) |
графики колебаний при отсут- |
|||||||||
|
|
|
|
|
ствии |
сопротивления. В этом |
|||||
|
|
|
|
t |
случае |
колебания |
|
незатухаю- |
|||
|
|
|
|
щие с постоянными амплиту- |
|||||||
|
Tf |
|
дой и частотой, зависящими от пара- |
||||||||
vf |
|
метров упругой системы и характери- |
|||||||||
Рис. 14.15 |
стик изменения силы. |
|
|
|
|||||||
|
|
|
|
||||||||
Рис. 14.16 иллюстрирует колебания в условиях сопротивления. |
|||||||||||
В процессе движения можно выделить два этапа. Вначале коле- |
|||||||||||
бания нестабильны: амплитуда переменна − |
сказываются собствен- |
||||||||||
ные колебания. Этот этап называют неустановившимся режимом |
|||||||||||
vr = Ar e− α tsin(ω |
r t + ϕ r) |
t |
колебаний. По истечении неко- |
||||||||
|
|
|
торого времени собственные ко- |
||||||||
vr |
vF =Af sin(θ t + ψ |
) |
лебания |
затухают, |
тело колеб- |
||||||
лется гармонически с постоян- |
|||||||||||
|
|
|
|
||||||||
|
TF |
|
|
ной амплитудой и частотой воз- |
|||||||
vF |
|
|
мущающей силы − |
установив- |
|||||||
|
|
|
|||||||||
|
|
|
шийся режим колебаний. |
||||||||
|
|
|
t |
||||||||
|
|
|
|
|
Анализ |
колебательного |
|||||
|
|
TF |
|
процесса |
на неустановившейся |
||||||
vf |
|
|
|
стадии связан с |
исследованием |
||||||
|
Установившийся |
сложной зависимости (14.15). На |
|||||||||
Неустановившийся |
|||||||||||
режим |
режим |
практике обычно рассматривают |
|||||||||
vf =Are− α |
tsin(ω r t+ϕ r)+ vf = Af sin(θ t + ψ ) стабилизировавшийся |
процесс, |
|||||||||
+Af |
sin(θ t+ψ ) |
Рис. 14.16 |
пренебрегая собственными коле- |
||||||||
баниями. Движение тела в этом случае описывается выражением |
|||||||||||
(14.14). В дальнейшем ограничимся установившимся режимом. |
|||||||||||
286
14.4.2.2. Резонанс при гармоническом воздействии
Сопоставим мгновенные значения силы и перемещения. Из равенств (а) и (14.14) видно, что моменты времени, в которые сила и перемещение достигают наибольших значений, не совпадают. Вынужденные колебания происходят со сдвигом фаз ψ .
По равенствам (б) и (в) находим
tgψ = D2 /D1 =− 2αθ /(ω 2−θθ 2) =− 2(α |
/ω )(θ /ω )/(1− (θ /ω )2). |
Исследуем полученное выражение. |
= 0), то при |
Если сопротивления движению нет (α |
|
− θθ < ω угол ψ = 0: сдвига фазы нет − |
направления силы и пе- |
ремещения совпадают; одновременно они обращаются в нуль, одновременно достигают экстремальных значений;
− θθ > ω угол ψ =−π − направления силы и перемещения противоположны; одновременно обращаются в нуль, но в тот момент, когда сила достигает наибольшего значения, перемещение становятся минимальными, и наоборот.
Иллюстрацией отмеченному служит таблица 14.1.
|
|
|
|
|
|
|
|
Таблица 14.1 |
||
Соотношения мгновенных значений силы и перемещения |
||||||||||
|
|
при отсутствии сопротивления |
|
|
|
|||||
θ /ω |
0 |
|
|
Фаза θ t |
|
|
|
|
||
π /4 |
π /2 |
3π /4 |
π |
5π /4 3π /2 7π /4 |
||||||
|
||||||||||
< 1 |
|
0,7Fa |
Fa |
0,7Fa |
|
0,7A |
|
A |
0,7A |
|
|
0,7A |
A |
0,7A |
|
0,7Fa |
Fa |
|
0,7Fa |
||
|
|
|
|
|||||||
|
|
0,7Fa |
Fa |
0,7Fa |
|
0,7A |
|
|
||
1 |
0 7A |
|
|
|
|
|
|
|||
0,7A |
|
0,7A |
A |
|
|
|
|
|||
|
|
|
0,7Fa |
Fa |
|
0,7Fa |
||||
|
|
0,7Fa |
Fa |
0,7Fa |
|
|
||||
|
|
|
0,7A |
|
A |
|
||||
> 1 |
|
|
|
|
|
|
|
|||
|
0,7A |
A |
0,7A |
|
|
|
|
|
||
|
|
|
0,7Fa |
Fa |
|
0,7Fa |
||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
287 |
|

При колебаниях с сопротивлением (α > |
0) характерны три си- |
|||||||
туации: |
|
|
|
|
|
|
|
|
− |
первая, θ < ω |
угол ψ |
< 0 − колебания отстают от возмущаю- |
|||||
щей силы; сдвиг фаз менее π /2; |
|
|
|
|||||
− |
вторая, когда θ |
= ω , отставание составляет π /2; |
|
|||||
− |
третья, при θ |
> |
ω тело не успевает за силой более чем на π /2. |
|||||
Таким образом, при наличии сопротивления движению (в ре- |
||||||||
ψ |
|
|
|
θ /ω |
альных конструкциях это всегда так) |
|||
0 |
|
1 |
|
колеблющееся тело не успевает за |
||||
−ππ /2 |
α >> |
0 |
α >> 0 |
силой. Чем выше частота возмущаю- |
||||
щей силы, тем больше |
отставание. |
|||||||
−π |
α |
= 0 |
|
|
Зависимость |
сдвига |
фаз |
ψ от отно- |
|
|
|
|
|||||
|
|
Рис. 14.17 |
|
шения частот |
θ и ω |
при разных ко- |
||
|
|
|
эффици- |
|
|
|
||
|
|
|
|
|
|
|
|
|
ентах затухания α отражена на рис. 14.17. Колебания с сопротивле- |
||||||||
нием проиллюстрированы также таблицей 14.2. |
|
|
||||||
|
|
|
|
|
|
|
|
Таблица 14.2 |
||
Соотношения мгновенных значений силы и перемещения |
||||||||||
|
|
при сопротивлении колебаниям |
|
|
|
|||||
θ /ω |
0 |
|
|
Фаза θ t |
|
|
|
|
||
π /4 |
π /2 3π /4 |
π |
5π /4 3π /2 7π /4 |
|||||||
|
||||||||||
< 1 |
|
0,7Fa |
Fa |
0,7Fa |
0,7Af |
|
0,7Af |
Af |
||
0,7Af |
|
0,7Af |
Af |
|
0,7Fa |
Fa |
|
|||
|
|
|
|
|||||||
|
|
0,7Fa |
Fa |
0,7Fa |
|
0,7Af |
|
|
||
1 |
0 7A |
|
|
|
|
|
|
|||
|
|
0,7Af |
Af |
|
|
|
|
|||
|
Af |
0,7Af |
|
0,7Fa |
Fa |
|
0,7Fa |
|||
|
|
|
|
|
|
|
||||
|
|
0,7Fa |
Fa |
0,7Fa |
0,7Af |
Af |
|
0,7Af |
|
|
> 1 |
|
|
|
|
|
|
||||
0,7Af |
Af |
0,7Af |
|
|
|
|
|
|
||
|
|
|
0,7Fa |
Fa |
|
0,7Fa |
||||
|
|
|
|
|
|
|
||||
Преобразуем выражение (г) амплитуды вынужденных колебаний к виду, удобному для практического применения. В этом равенстве Fa/(mω 2) = Fa/c = vst − статическое перемещение от Fa. Тогда
288
|
|
1/√(1−θθ 2/ω 2)2+4α 2θ 2/ω 4 = kdin |
|
|
(14.16) |
||||
есть динамический коэффициент, показывающий, во сколько раз |
|||||||||
наибольшее перемещений превышает его статическое значение от |
|||||||||
амплитудной величины возмущающей силы. После введения этого |
|||||||||
понятия равенство (г) можно записать так: |
|
kdin |
|
|
|
||||
|
|
Af = kdinvst. |
(14.17) |
|
|
|
|
||
|
|
|
|
|
|
|
|||
|
Величина динамического коэффици- |
|
|
|
|
α /ω = 0 |
|||
ента зависит от отношений α /ω |
и θ /ω . Эти |
4 |
|
|
|
0,05 |
|||
зависимости приведены на рис. 14.18. При |
3 |
|
|
|
|||||
отсутствии сопротивления (α = 0) и равен- |
|
|
|
0,1 |
|||||
стве частот свободных и вынужденных ко- |
2 |
|
|
|
|||||
|
|
|
|
||||||
лебаний kdin обращается в бесконечность. |
1 |
|
|
|
0,15 |
||||
Если α > 0 (колебания с сопротивлением), |
|
|
|
θ /ω |
|||||
динамический коэффициент ограничен, но |
|
|
|
|
|||||
в зоне совпадения частот принимает наи- |
0 |
0,5 |
1 |
1,5 |
|||||
большее значение. |
|
|
|
Рис. 14.18 |
|||||
|
Увеличение амплитуды при совпадении частот собственных и |
||||||||
вынужденных колебаний носит название резонанса. |
|
|
|
||||||
|
Если в дорезонансном диапазоне динамический коэффициент |
||||||||
превышает единицу, то в области θ > ω он резко уменьшается. Де- |
|||||||||
формационный эффект действия высокочастотных сил становится |
|||||||||
практически неощутимым. |
|
|
|
|
|
|
|
||
|
Из используемой в теории предпосылки о подобии статических |
||||||||
и динамических перемещений, следует подобие эпюр напряжений. |
|||||||||
Поэтому σ |
din = kdinσ st, где σ st − |
напряжение от статического дейст- |
|||||||
вия амплитудной силы. |
|
|
|
F |
|
|
|
||
|
Пример 14.9. Электродвигатель |
|
|
|
|
||||
массой m = 200 кг (2 Н с2/см) укреплен |
|
|
|
|
|
||||
на |
конце |
консольной |
балки |
(рис. |
|
|
|
|
|
14.19). Его ротор вращается со скоро- |
|
|
|
l |
|
||||
стью n = 500 об/мин. При работе двига- |
|
|
|
|
|||||
теля возникает возмущающая сила F, |
|
Рис. 14.19 |
значени- |
||||||
|
|
|
|
|
|
||||
изменяющаяся по гармоническому закону с амплитудным |
|||||||||
ем Fa = 600 Н. Коэффициент сопротивления r = 8 Н с/см. |
Найдем |
||||||||
наибольшее нормальное напряжение в балке, |
если |
она |
выполнена |
||||||
из двух швеллеров № 14; длина l = 1,6 м. Материал сталь. |
|
|
|||||||
289

|
Коэффициент поперечной жесткости балки в месте установки |
||||||
двигателя |
cy = 3EJx /l3 = 3 2 104 2 491/1603 = 14,4 кН/см. |
|
|||||
|
Частота собственных колебаний ω |
= √c/m =√14400/2 = 84,8 1/c. |
|||||
|
Частота возмущающей силы θ |
= π n/30 = 3,14 500/30 = 52,3 1/c. |
|||||
|
Коэффициент затухания α = r /(2m) = 8/(2 2) = 2 1/c. |
|
|||||
|
Динамический коэффициент kdin = 1/√(1−θθ 2/ω 2)2 + 4α 2θ 2/ω 4 = |
||||||
|
= 1/√(1− 52,32/84,82)2 + 4 22 52,32/84,84 = 1,61. |
|
|||||
|
Нормальные напряжения maxσ z =maxMx/Wx= (mg+kdinFa)l/Wx= |
||||||
|
= (2 981 + 1,61 600)160/(2 70,2) = 3340 Н/см2 = 3,34 кН/см2. |
||||||
|
14.4.2.3. Колебания в условиях резонанса |
|
|||||
|
Ознакомимся теперь со спецификой колебаний при совпадении |
||||||
частот собственных колебаний и возмущающей силы. При этом рас- |
|||||||
смотрим самый неблагоприятный случай − колебания без сопротив- |
|||||||
ления (α = 0). |
|
|
|
|
|
|
|
|
Уравнение движения тела без сопротивления имеет вид |
||||||
|
|
.. |
ω 2v = (Fa/m)sinθ t. |
|
|
||
|
|
v+ |
|
|
|||
Его общее решение v = C1 sinω t + C2 cosω t + D1 sinθ t + D2 cosθ t c ко- |
|||||||
эффициентами частного решения D1 = vst /(1−θθ 2/ω 2) и D2 = 0. Введя |
|||||||
|
|
|
. |
|
|
|
|
начальные условия v = 0 и v= 0 при t = 0, запишем его так: |
|
||||||
|
|
v = vst(sinθ t − (θ /ω |
)sinω t)/(1−θθ 2/ω 2). |
|
|
||
|
В рассматриваемых условиях резонанса оно представляет собой |
||||||
а) |
vstsinω t |
t |
неопределенность типа |
0/0. |
Применяя |
||
|
|
правило Лопиталя, получаем |
|
||||
|
|
|
|
v = vst(sinω t−ωω tcosω t)/2. |
|||
б) |
vst(− ω tcosω t) |
Таково уравнение колебаний при резо- |
|||||
|
|
|
нансе. Первое слагаемое в нем представ- |
||||
|
|
t |
ляет |
периодическую |
ограниченную |
||
|
|
функцию (рис. 14.20 а). Второе − перио- |
|||||
|
|
|
дическую функцию с амплитудой, воз- |
||||
|
|
|
растающей |
пропорционально |
времени |
||
|
|
|
(рис. 14.20 б). Таким образом, амплитуда |
||||
в) |
|
|
при резонансе растет постепенно. Требу- |
||||
|
|
t |
ется некоторое время, чтобы “раскачать” |
||||
v Рис. 14.20 |
|
систему. График изменения суммарного |
|||||
|
перемещения показан на рис. 14.20 в. |
||||||
290 |
|
|
|
|
|
|
|
В реальных условиях из-за сопротивления движению не происходит неограниченного роста амплитуды. Тем не менее факт увеличения напряжений, деформаций и перемещений при резонансе неоспорим и его необходимо учитывать при расчете конструкций.
Одновременно отметим, что при больших перемещениях становится сомнительной правомерность применения дифференциальных уравнений движения. Сомнительны и сделанные на их основе выводы.
Степень доверительности результатов расчетов конструкции обычно оценивают, анализируя, насколько реальные условия ее работы согласуются с предпосылками примененной теории.
14.4.2.4. Некоторые частные случаи действия возмущающей силы
Рассмотрим три вида непериодического силового воздействия. Во всех случаях будем считать, что коэффициент затухания α = 0, а
система до приложения нагрузки находилась в состоянии покоя. |
t |
||||
Линейный рост силы (рис. 14.21 а). |
|
|
|||
|
|
|
|||
|
. |
F |
а) |
|
|
Сила растет по закону F = F t. |
|
t |
|||
Частное решение уравнения (14.12) име- |
|
|
|||
. |
. |
|
|
|
|
ет вид vpar = F t /(mω 2) = F t/c. |
. |
|
|
|
|
|
|
|
. |
|
|
Общее решение: v = Asin(ω t + ϕ |
) + F t/c. v |
б) |
|
||
Ft/c |
|
||||
Используя условия: при t = 0 начальные |
Рис. 14.21 |
|
|||
перемещение v = 0 и скорость v. = 0, последовательно находим ϕ = 0, |
|||||
. |
. |
|
|
|
|
A =− F /(cω ). Итак, |
v = (F/c)(t − (sinω |
t)/ω ). График движения тела по- |
|||
казан на рис. 14.21 б. Перемещение представляет собой сумму ли-
.
нейно возрастающей статической части F t/c и синусоидальной ди-
.
намической добавки с амплитудой F/(cω ). Из графика движения видно, что полное перемещение (а следовательно, напряжения и деформации) в отдельные моменты времени превышают мгновенные статические значения.
Постоянная внезапно приложенная нагрузка (рис. 14.22 а). Сила постоянна: F = Fa.
291

|
Частное решение уравнения (14.12) − |
vpar = Fa/(mω 2) = Fa/c = vst. |
|||
|
|
а) |
t |
Общее решение v = Asin(ω t+ϕ ) + vst. При |
|
|
|
|
оговоренных начальных условиях оно бу- |
||
Fa F |
|
|
дет иметь вид v = vst(1− cosω t). |
||
б) |
t |
При внезапном приложении силы, ос- |
|||
|
|
тающейся в дальнейшем постоянной, тело |
|||
vst |
|
|
|
совершает гармонические колебания око- |
|
|
|
|
ло положения |
статического равновесия |
|
2vst |
|
|
|
||
v |
|
|
(рис. 14.22 б). Наибольшее перемещение |
||
|
Рис. 14.22 |
|
при этом в два раза превышает статиче- |
||
|
|
|
|||
ское. Динамический коэффициент kdin = 2.
|
Действие постоянной нагрузки в течение короткого промежутка |
||
|
t0 |
а) |
времени (рис. 14.23 а). |
|
|
t |
Этот случай можно свести к преды- |
Fa |
|
|
дущему. Представим, что при t = 0 к телу |
F |
|
внезапно приложена постоянная сила Fa, в |
|
|
|
||
Fa |
|
дальнейшем остающаяся неизменной. В |
|
б) |
|
||
t |
момент t = t0 на него подействовала такая |
||
|
|
|
же сила навстречу первой (рис. 14.23 б). |
Fa |
F |
|
Теперь очевидно, что тело будет участво- |
|
вать в двух движениях (рис. 14.23 в). Раз- |
||
2vst |
|
|
ность их (рис. 14.23 г) и есть зависимость |
|
в) |
|
|
|
t |
перемещения от времени. |
|
|
|
||
|
|
|
Нетрудно заметить, что величина на- |
2vst |
|
|
ибольшего перемещения после разгрузки |
v |
|
зависит от продолжительности импульса. |
|
|
г) |
|
Неблагоприятная длительность – полупе- |
|
t |
риод собственных колебаний. При ней ди- |
|
|
|
||
|
|
|
намический коэффициент kdin= 2. |
2vst |
|
|
Рассмотренные частные случаи дей- |
v Рис. 14.23 |
ствия непериодических сил не только дают |
||
|
представление о поведении упругой сис- |
||
темы, но и иллюстрируют методику анализа процессов изменения |
|||
напряжений, деформаций и перемещений при динамических воздей- |
|||
ствиях. Используя описанные приемы, можно воспроизвести поведе- |
|||
ние конструкции при других видах возмущающих сил. |
|||
292 |
|
|
|
14.5. Ударное воздействие
Под ударом будем понимать внезапное изменение скорости тела, вызванное быстрым изменением сил.
Задача о напряжениях, деформациях и перемещениях, возникающих в упругой конструкции при ударе, может быть решена методами теории колебаний – установлен закон движения тела, найдены моменты времени, когда характеристики напряженнодеформированного состояния достигают экстремумов. Однако в практических расчетах достаточно воспроизвести самое опасное состояние конструкции, не анализируя весь процесс движения. Поэтому в расчетах на удар часто применяют энергетический метод, позволяющий определить максимальные значения динамических сил, а по ним − напряжений, деформаций и перемещений.
Энергетический метод основан на законе сохранения энергии в форме баланса механических ее составляющих.
Метод опирается на следующие предпосылки:
−удар неупругий, т.е. соударяемые тела после соприкосновения движутся совместно;
−контактное взаимодействие упруго, т.е. энергия пластиче-
ского деформирования в месте контакта соударяемых тел не учитывается;
−волны деформаций распространяются мгновенно, т.е. эпюры статических и динамических перемещений подобны;
−конструкция испытывает упругие деформации;
−силы внутреннего сопротивления и сопротивления среды не учитываются.
На основе перечисленных предпосылок удается сформировать достаточно простые методы прогнозирования напряжений, деформаций
иперемещений в конструкции, подверженной удару.
14.5.1.Напряжения и деформации
вневесомой конструкции при ударе. Динамический коэффициент
Методику составления уравнения энергетического баланса и способ сведения динамической задачи к задаче статической рассмотрим на примере удара падающего тела по невесомой упругой системе (рис. 14.24).
293

На рисунке отражены три состояния упругой конструкции: |
|||
. |
б) |
в) |
г) |
а) v0m |
|||
vst |
vst |
|
vdin |
||
|
||
|
vdin |
|
|
1 |
|
Рис. 14.24 |
||
mg Fdin c
F

 v
v
−начальное недеформированное (рис. 14.24 а);
−деформированное при статическом действии тела (рис. 14.24 б);
−при максимальных деформациях после удара (рис. 14.24 в).
В первый момент времени, когда падающее тело коснулось конструкции, но еще не вызвало ее деформаций, механическая энергия
равна |
1 |
. |
2 |
/2 + P. |
|
K + P = mv |
|||
|
|
|
0m |
|
Здесь K − кинетическая энергия ударяющего тела; P − его потенциальная энергия положения (по отношению к некоторому воображае-
.
мому уровню); m − масса падающего тела; v0m − скорость тела в момент соударения.
После контакта с упругой системой скорость движения тела уменьшается и в некоторый момент (рис. 14.24 в) достигает нуля − тело на мгновение останавливается перед началом движения вверх. Механическая энергия в этом состоянии
P − mg vdi n+ Fdinvdin /2,
где P − mg vdin − потенциальная энергия положения тела (по отношению к тому же уровню); Fdin − условная динамическая сила; vdin − динамическое перемещение; Fdinvdin /2 − потенциальная энергия деформации упругой конструкции (рис. 14.24 г; ее геометрическим образом является площадь заштрихованного треугольника).
________________
1 От англ. kinetic energy − кинетическая энергия; potential energy − потенциальная энергия.
294
Приравняв значения энергии в рассмотренные моменты времени, приходим к уравнению энергетического баланса
. 2 |
|
mv0m /2 + P = P − mgvdin + Fdinvdin /2. |
|
Введем обозначение Fdin/mg = vdin /vst = kdin, |
(14.18) |
в котором kdin − динамический коэффициент; vst − |
статическое пере- |
мещение точки соударения от спокойно лежащего тела.
После несложных алгебраических преобразований условие баланса энергии принимает форму квадратного уравнения относитель-
|
2 |
− 2kdin − |
. 2 |
|
но динамического коэффициента kdin |
v0m/(gvst) = 0. |
|||
Из него |
. |
2 |
|
(14.19) |
kdin = 1+√1+ v0m/(gvst) |
|
|||
(отрицательный корень уравнения отбрасываем). |
|
|||
Теперь задача расчета на ударное воздействие сведена к стати- |
||||
ческой задаче. Например, напряжения при ударе |
σ din = kdinσ st, |
|||
где σ st − |
напряжения от статического действия силы, |
равной весу |
||
упавшего тела. |
|
|
m |
|
Пример 14.10. На конец двутав- |
|
h |
||
ровой консольной балки длиной l = 3 м |
l |
f |
||
падает тело массой m = 200 кг с высо- |
|
|||
ты h = 4 см (рис. 14.25). Двутавр № 24. |
Рис. 14.25 |
|||
Найдем прогиб на конце и нормальные напряжения от удара.
Квадрат скорости тела v. 20m = 2gh.
Статический прогиб на конце fst = mgl3/(3EJx) =
= 200 9,81 33/(3 2 1011 3460 10-8) = 0,0026 м = 0,26 см.
Динамический коэффициент
kdin = 1+√1+ v. 20m/(gvst) = 1+√1+ 2h/fst =1+√1+ 2 4/0,26 = 6,64.
Максимальный прогиб на конце балки
fdin = kdin fst = 6,64 0,26 = 1,73 см.
Максимальное напряжение от удара maxσ din= kdin maxσ st=
=kdinmgl/Wx= 6,64 200 9,81 3/(289 10-6) = 13,5 кН/см2.
14.5.2.Учет массы деформируемой системы при расчете на удар
Нередко в расчетах на удар приходится учитывать массу конструкции. В таких случаях в точку соударения помещают тело массой
295

mred (рис. 14.26)1. Оно отражает инерционные свойства конструкции, которую по-прежнему рассматривают как невесомую. Найдем динамический коэффициент при расчете на удар по этой схеме.
На рис. 14.26 изображены состояния упругой системы:
а) |
б) |
|
mred |
в) |
г) |
. |
д) |
|
е) |
g(m+mred) |
|
m+ |
|
v0m |
|
|
gmred |
c F |
|
+mred |
|
|
|
|
vsredt |
|
gmred+Fdin |
vsr ted |
vst |
|
|
|
|
||
|
|
vdin |
vsr ted+vst |
|
|
||
|
|
|
|
|
vsr ted+vdin |
|
|
|
|
|
|
|
1 |
v |
|
|
|
|
|
Рис. 14.26 |
|
||
|
|
|
|
|
|
||
−естественное ненапряженное (рис. 14.26 а);
−статическое деформированное телом, имитирующим массу конструкции (рис. 14.26 б);
−деформированное при статическом действии двух тел − m и mred (рис. 14.26 в);
−в момент соударения (рис. 14.26 г);
−в момент остановки упавшего тела (рис. 14.26 д).
Если падающее тело непосредственно перед соударением имеет
.
скорость v0m, то скорость совместного движения тел можно найти по закону сохранения количества движения:
|
|
. |
. |
|
|
|
|
|
mv0m= (mred + m)v1, |
|
|
|
|
откуда |
. |
. |
|
|
|
|
v1 = mv0m/(mred + m). |
|
|
|
|||
Механическая энергия при этом равна |
|
|
|
|||
|
(mred |
. 2 |
red |
/2, |
||
|
+ m)v /2 |
+ P + mred gvst |
|
|||
|
2 . 2 |
1 |
|
|
|
|
или |
|
|
red |
/2. |
||
m v0m /(2(mred + m)) + P + mred gvst |
||||||
Последние слагаемые в выражениях энергии − |
|
|
потенциальная энер- |
|||
гия деформации упругой конструкции от тела массой mred. В момент максимальной деформации энергия равна
P− (mred + m)gvdin + (mredg + Fdin)g(vrsetd+ vdin)/2.
Иллюстрацией к записи последнего слагаемого − потенциальной энергии деформации − служит рис. 14.26 е.
______________________________________
1 Индекс от англ. reduction − приведение; о выборе mred − ниже.
Уравнение энергетического баланса имеет вид
.
m2v 20m /(2(mred + m)) + P + mred gv redst /2 =
= P− (mred + m)gvdin + (mred g + Fdin)g(v redst + vdin)/2.
После преобразований с использованием обозначений (14.18) и со-
отношения Fdin/vdin = mred g/v sr etd |
(см. рис. 14.26 е) приходим к квад- |
||
ратному уравнению |
2 |
. 2 |
/(vst(mred + m)g) = 0. |
kdin− 2kdin− mv0m |
|||
.
Из него kdin = 1+√1+ mv 20m/(vst(mred+ m)g). (14.20)
Сопоставление результатов (14.19) и (14.20) показывает, что учет массы деформируемой конструкции приводит к меньшему значению динамического коэффициента.
Из тех же формул видно, что динамический коэффициент все-
.
гда больше единицы. В частном случае, когда v 20m= 0, kdin= 2. Это соответствует внезапному приложению постоянной нагрузки, рассмот-
ренному выше, и полностью согласуется с результатом, полученным методами теории колебаний. m m
Эффект ударного воздействия в значитель- |
а) |
б) |
h |
|
ной мере зависит от жесткости конструкции. Чем |
|
|||
она жестче (меньше vst), тем больше kdin. Так, |
|
|
|
|
статические напряжения в гладком стержне, изо- |
|
|
A1> |
A |
браженном на рис. 14.27 а, и опасном сечении |
|
A |
|
|
стержня с местной выточкой (рис. 14.27 б) оди- |
|
|
|
|
наковы. Динамические же напряжения во втором |
|
|
|
|
случае (рис. 14.27 б) будут больше, так как у него |
|
|
|
|
меньше статическое перемещение от веса па- |
|
|
|
|
дающего тела. |
Рис. 14.27 |
|
||
|
|
|||
Другой пример (рис. 14.28). Груз, падающий в точку a балки, |
||||
вызовет бо′льшие динамические напряжения нежели такой же груз, |
||||
падающий с такой же высоты, но в точку b. Это объясняется тем что |
||||
− коэффициент жесткости балки в |
|
m |
m |
|
точке a − cay в 8 раз больше чем cby (про- |
|
a |
h |
b |
гиб пропорционален кубу расстояния от |
|
|
|
|
точки до защемления); |
l |
|
l |
|
− статические напряжения в первом |
Рис. 14.28 |
|
||
случае (удар в точке a) всего в два раза меньше чем во втором. |
|
|||
296 |
297 |

Благодаря простоте, энергетический метод удобен для практических расчетов на удар. Однако точность результатов при этом невысока. Формулы (14.19) и (14.20) дают представление о количественном порядке напряжений, деформаций и перемещений при ударе. Попытки уточнить результаты на расчетных схемах, полнее отражающих динамические свойства конструкции и процесса соударения, приводят к большим трудностям. Невозможно элементарными средствами выявить напряженно-деформированное состояние в зоне контакте и характер изменения его во времени; большие затруднения возникают при учете волнового процесса распространения напряжений и деформаций; трудно поддается анализу и описанию рассеяние энергии при ударе. Поэтому на практике изложенные методы нашли широкое применение. Используя их, следует иметь в виду данный критический анализ.
14.5.3. Понятие о коэффициенте приведения массы
Как было отмечено выше, учет инерционных свойств упругой конструкции воспроизводится введением в место удара элемента, обладающего массой. Естественно возникает вопрос о критерии соответствия точечной массы и массы конструкции. Вообще говоря, такой критерий выбирают в зависимости от поставленной задачи и предпосылок, в рамках которых она решается. Распространенным и часто используемым является эквивалент по кинетической энергии, иногда − по количеству движения. Не исключено использование и других эквивалентов. Возможно применение разных критериев на разных этапах одной задачи.
В тех механических моделях, где инерционные свойства упругой конструкции отображены одним весомым элементом, его масса mred определяется по формуле,
mred = kredmstr,
где kred − коэффициент приведения массы; mstr − масса конструкции.
Численное значение коэффициента определяется выбранным критерием отображения.
Методику определения коэффициента приведения массы проиллюстрируем примерами.
298
Пример 14.11. Допустим, что при расчете на растягивающий |
|||||||||||||||||||||
удар (рис. 14.29) потребовалось учесть массу стержня. Место удара |
|||||||||||||||||||||
− нижний конец. Найдем коэффициент приведения массы к точке |
|||||||||||||||||||||
удара. В качестве критерия примем кинетическую энергию. |
|
|
|||||||||||||||||||
Представим стержень, изображенный на рис. |
|
а) |
|
б) |
|||||||||||||||||
14.29 а, невесомой моделью с точечной массой на |
|
|
|
|
|||||||||||||||||
нижнем конце (рис. 14.29 б). |
|
|
|
|
|
|
|
|
|
|
|
|
z |
||||||||
От вертикальной силы F, приложенной на |
|
|
|||||||||||||||||||
|
|
|
|
||||||||||||||||||
свободной конце, перемещение произвольного се- |
l |
|
w |
||||||||||||||||||
чения |
w = Fz /(EA), |
а конца стержня f = Fl/(EA). |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
Отсюда w = fz/l. Скорости движения w. = fz/l. |
|
|
|
|
|
||||||||||||||||
Кинетическая энергия стержня |
|
|
|
|
|
|
|
|
|
mred |
|||||||||||
|
|
l |
|
. 2 |
|
|
l |
|
. |
2 |
|
|
|
|
|
|
f |
|
|
||
|
Kstr = ∫ |
|
dz/2 = ∫ |
|
dz/2 = |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
ρ A(w) |
ρ A(fz/l) |
|
|
|
|
|
|
|
||||||||||||
|
|
0 |
|
. |
|
|
0 |
. |
|
|
|
|
|
|
|
|
|
|
Рис. 14.29 |
||
|
|
|
|
2 |
|
|
|
2 |
/6. |
|
|
|
|
|
|
|
|||||
|
|
= ρ Al(f ) |
/6 = mstr(f ) |
|
|
|
|
|
|
|
|
|
|
||||||||
Точечная масса, двигаясь по тому же закону, что и конец стержня, |
|||||||||||||||||||||
обладает кинетической энергией Km = mred(f. )2/2 = kredmstr(f. )2/2. Из |
|||||||||||||||||||||
равенства энергий движения Kstr = Km находим коэффициент приве- |
|||||||||||||||||||||
дения массы |
kred = 1/3. |
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|||||
Пример 14.12. Найдем коэффици- |
|
|
|
|
|
|
|||||||||||||||
ент приведения массы к концу балки, |
|
|
|
|
|
|
|
||||||||||||||
подверженной удару |
на свободном кон- f |
|
|
z |
v |
|
|
|
|||||||||||||
це (рис. 14.30). |
Критерий тот же − |
ки- |
|
|
|
|
|
||||||||||||||
нетическая энергия. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
От силы F, приложенной на конце, f |
|
|
|
v |
l |
|
|
||||||||||||||
(см. пример 7.9) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
v = F(z3/6 − |
l2 z/2 + l3/3)/(EJx); |
f = Fl3/(3EJx). |
Рис.14.30 |
|
|||||||||||||||||
Из этих равенств v = 3f(z3/6− |
l2 z/2 + l3 /3)/l3 .Скорость движения то- |
||||||||||||||||||||
чек оси балки v. |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
= 3f (z3/6 − l2 z/2 + l3 /3)/l3 . Кинетическая энергия |
|||||||||||||||||||||
l |
. 2 |
|
|
l |
|
. |
3 |
|
2 |
|
|
|
3 |
|
3 |
2 |
|
|
. |
2 |
|
|
dz/2 = ∫0ρ |
|
|
z/2+l |
/3)/l |
|
|
/280. |
|||||||||||||
Kstr = ∫0ρ A(v) |
A(3f |
(z /6− l |
|
|
|
) |
dz/2 = 33mstr ( f ) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
. |
|
|
|
У точечной массы Km = mred( f )2/2 = kred mstr ( f )2/2. Из равенст- |
|||||||||||||||||||||
ва кинетических энергий следует, что kred = 33/140. |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
299 |