

Сопротивление материалов / Suriyaninov - Metodi postroeniya epyur 2001
.pdfДва возможных варианта эпюры MF0 представлены на рис.58,б,в
(возможны и другие варианты статически определимых рам, образованных из заданной, и, соответственно, другие варианты эпюры MF0 ). Легко убедиться, что результат перемножения любой из этих эпюр на эпюру M S равен нулю, что также подтверждает правильность вычислений, так как в рассматриваемом примере
R1F + R2F + R3F |
160 |
|
160 |
+ 0 = 0. |
||
= − |
|
+ |
|
|
||
|
3 |
|||||
|
3 |
|
|
|||
Подставляя найденные значения коэффициентов и свободных членов в исходную систему канонических уравнений, получим:
3 |
|
Z + |
|
1 |
|
Z |
|
− |
|
3 |
Z |
|
|
= |
|
160 |
; |
|
|
|||
|
|
2 |
|
3 |
|
|
|
|||||||||||||||
2 |
1 |
4 |
|
|
|
8 |
|
|
|
|
3EI |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1 |
|
Z1 + |
|
5 |
|
Z |
|
+ |
|
7 |
|
Z3 |
= − |
160 |
; |
(4.17) |
||||||
4 |
2 |
2 |
24 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3EI |
|
||||||||
|
3 |
Z1 |
7 |
Z |
|
|
|
7 |
Z3 = 0. |
|
||||||||||||
− |
|
+ |
|
2 + |
|
|
||||||||||||||||
|
|
|
|
|||||||||||||||||||
|
8 |
|
24 |
|
|
|
18 |
|
|
|
|
|
|
|
||||||||
Решение системы (4.17) дает следующие значения неизвестных:
|
= |
65,4 |
; |
|
||
Z1 |
|
|
|
|||
EI |
||||||
|
|
|
|
|||
|
|
|
|
|
||
|
= − |
38,4 |
|
|||
Z 2 |
|
|
; |
|||
|
|
|||||
EI
91,8
Z 3 = .
EI
Единичные эпюры моментов (рис.55,в-д) теперь можно "исправить", т.е. умножить на соответствующие значения неизвестных. При этом вторая эпюра
M 2 поменяет знаки, так как z2<0. Окончательную эпюру изгибающих моментов М (рис.58,г) построим согласно выражению:
M = M1Z1 + M2Z2 + M3Z3 + MF . |
(4.18) |
141

Рис. 58
Выполним статическую проверку. Для этого вырежем узлы 4 и 5, а также среднюю часть рамы (рис.59,а-в) и убедимся в выполнении условий равновесия.
Как уже говорилось, статическая проверка является достаточным критерием правильности выполненного расчета. Тем не менее, выполним дополнительно кинематическую проверку. Для этого построим суммарную единичную эпюру MS в основной системе метода сил (рис.59,г). Читателю предоставляется возможность самостоятельно убедиться в том, что результат умножения этой эпюры на окончательную эпюру моментов М (рис.58,г) равен нулю.
В заключение отметим, что степень статической неопределимости
рассмотренной рамы равна пяти, а это означает, что трудоемкость расчета
142

данной системы методом сил значительно выше, чем при использовании метода перемещений.
Рис. 59
Пример 25. Для рамы с наклонными стойками (рис.60,а) построить эпюры M, Q, N при условии, что жесткость ригеля (2-3) в два раза больше чем жесткость наклонных стоек 1-2 и 3-4.
Определяем степень кинематической неопределимости рамы:
N = Ny + Nл = 1 +1 = 2.
Основную систему образуем путем введения защемления в узле 2 и горизонтального опорного стержня в узле 3 (рис.60,б).
Для определения неизвестных перемещений z1 и z2 по направлениям введенных связей запишем систему канонических уравнений метода перемещений:
143

R Z |
|
+ R |
Z |
|
+ R |
|
= 0; |
|
|
|
|
11 |
1 |
|
12 |
|
2 |
|
1F |
|
|
|
(4.19) |
R21Z1 + R22 Z 2 + R 2F = 0. |
|
||||||||||
Используя вспомогательную таблицу метода перемещений, построим |
|||||||||||
|
|
|
|
||||||||
эпюры изгибающих моментов от единичного угла поворота Z1 |
= 1 и от внешней |
||||||||||
нагрузки (рис.60,в,г). |
|
|
|
|
|
|
|
|
|
|
|
Отметим, что узловая нагрузка |
F1 |
|
не вызывает изгибающих моментов в |
||||||||
основной системе. Для построения эпюры моментов от единичного горизонтального перемещения Z 2 = 1 второй связи необходимо знать, как перемещаются в этом случае концы стержней рамы. Перемещение узла 3 происходит по направлению, перпендикулярному линии 3-4 (искомое перемещение Z 2 является горизонтальной проекцией полного смещения узла 3, а узла 2 – по направлению, перпендикулярному линии 1-2. В результате этого происходит относительное перемещение узлов 2 и 3 по вертикали.
Рис. 60
144
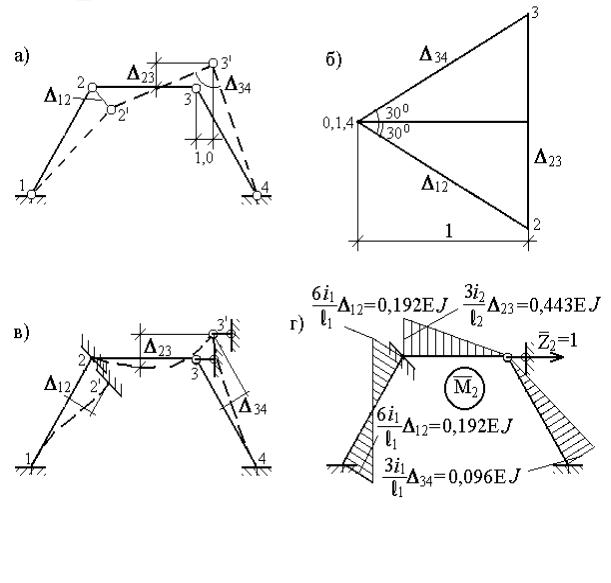
Для определения указанных перемещений построим для шарнирной схемы, образованной из заданной рамы (рис.61,а),полярный план перемещений (рис.61,б). Из этого плана определим взаимное перемещение концов стержней:
|
= 34 = |
1 |
= 1,155; |
12 |
|
||
|
|||
|
|
COS 30O |
|
23 |
= 2tg30O = 1,155. |
||
Так как введенное защемление препятствует повороту узла 2, то от найденных взаимных смещений произойдет изгиб стержней (рис.61,в). Эпюра моментов М 2 может быть теперь построена с помощью вспомогательной таблицы метода перемещений (рис.61,г).
Рис. 61
145

Коэффициенты r11, r12 и свободный член R1F определим из условия равновесия узла 2:
r11 = 0,667EI + 1,5EI = 2,167EI; r12 = 0,433EI − 0,192EI = 0,241EI;
R1F = −60 кН м
Для определения коэффициента R22 , представляющего собой реакцию во введенном стержне от единичного смещения Z2 = 1 , рассмотрим условия равновесия ригеля, отсеченного от стоек. Для этого необходимо определить поперечные и продольные силы, соответствующие эпюре М 2 , вырезав из рамы сначала узел 2, а затем узел 3. Так, условия равновесия узла 2 (рис.62,а) дают:
∑Y = 0 : (0,108 + 0,064SIN 30O )EI − N21 COS 30O = 0,
откуда N21 = 0,162EI.
∑X = 0 : (0,162SIN 30O + 0,064 COS 30O )EI − N23 = 0,
откуда N23 = 0,136EI.
Условия равновесия узла 3 (рис.62,б) позволяют получить:
∑Y = 0 : (− 0,108 − 0,016SIN 30O )EI − N34 COS 30O = 0,
N34 = −0,134EI.
∑X = 0 : (0,136 + 0,016 COS 30O + 0,134 SIN 30O )EI − R22 = 0,
R22 = 0,217EI.
Аналогично можно определить и свободный член R2F по эпюре M F ,
вырезая узлы 2 и 3 (рис.62,в,г):
R2F = −37,32 кН
146

Рис. 62
Использование статического способа для вычисления коэффициентов R2F
и M F для рамы с наклонными стойками приводит, как можно было убедиться из рассматриваемого примера, к усложнению расчетов. Поэтому в подобных случаях целесообразно использовать способ перемножения эпюр:
|
|
|
|
|
|
|
2 |
0,192 3 |
|
|
|
|
0,433 4 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
M 2 |
|
2 |
|
|
|
2 |
|
|
1 |
|
|||||||||
R |
|
= |
|
|
|
|
|
|
DS = |
|
|
|
|
|
0,192 |
2 + |
|
|
|
0,433 |
|
+ |
|
|
∑∫ |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
22 |
|
|
EI |
|
2 |
|
|
3 |
|
|
2 |
|
3 |
|
|
2 |
|
||||||
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
0,096 6 |
|
2 |
|
0,096 |
|
= 0,217EI. |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
2 |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для определения свободного |
члена |
R2F |
способом |
перемножения эпюр |
|||||||||||||||||||
нужно построить эпюру моментов от внешней нагрузки в статически определимой системе, образованной из заданной рамы (рис.63,а):
|
|
|
|
|
|
|
|
|
|
R2F = −∑∫ |
M 0 M 2 |
DS = −(2 |
503,92 − 2 160 + 160 − 503,92) 0,192 + |
||||||
F |
|||||||||
EI |
|||||||||
S |
|
|
|
|
|
|
|
|
|
+ (2 0,433 + 0,216) 160 |
2 |
|
1 |
= −37,32 KH |
|||||
6 |
2 |
||||||||
|
|
|
|
|
|
|
|||
После подстановки вычисленных коэффициентов в уравнения (4.19) получим:
147

2,167Z1 + 0,241Z |
|
− |
60 |
= 0; |
|||
2 |
|
|
|||||
|
|
|
|
EI |
|
||
|
|
|
|
|
|||
|
|
|
37,32 |
|
|||
|
+ 0,217Z |
|
− |
= 0, |
|||
0,241Z1 |
2 |
|
|
|
|||
|
|
|
|||||
|
|
|
|
|
EI |
|
|
откуда:
|
|
= |
9,768 |
|
||
Z1 |
|
|
; |
|
||
|
|
|||||
|
|
|
|
EI |
||
|
|
161,132 |
|
|||
|
|
= |
|
|||
Z |
2 |
|
|
. |
||
|
||||||
|
|
|
|
EI |
||
Окончательную эпюру моментов (рис.63,б) строим по формуле:
M = M 1Z1 + M 2 Z2 + M F .
Соответствующие ей эпюры поперечных и продольных сил показаны на рис.63,в,г.
Рис. 63
148
Читателю предлагается самостоятельно убедиться в том, что для окончательных эпюр выполняются статические проверки: в узле 2 изгибающие моменты уравновешены; а силы, действующие на верхнюю отсеченную часть рамы, удовлетворяют условиям равновесия ∑Х = 0 и ∑Y = 0.
Пример 26. Используя упрощения, связанные с симметрией заданной рамы (рис.64,а), построить эпюру изгибающих моментов, при условии, что жесткости всех стержней одинаковы и равны EI.
Степень кинематической неопределимости рамы:
N = N y + Nл = 2 +1 = 3
При выборе основной системы метода перемещений (рис.64,б) используем условия симметрии. Сгруппируем неизвестные углы поворота, т.е. угол поворота узла 2 представим в виде суммы двух углов поворота Z1 и Z2 , а
поворот узла 2′ , симметричного узлу 2, - в виде разности углов Z1 |
и Z2 . |
||||||||||
Горизонтальное перемещение ригеля Z3 является обратносимметричным |
|||||||||||
неизвестным, так как узел 2′ |
при этом смещается от оси симетрии рамы, а |
||||||||||
симметричный ему узел 2 – к оси симметрии. |
|
||||||||||
Для определения групповых неизвестных Z1 , Z2 и Z3 запишем систему |
|||||||||||
трех канонических уравнений метода перемещений: |
|
||||||||||
R Z |
|
+ R Z |
|
+ R Z |
|
+ R |
|
= 0; |
|
||
|
11 |
1 |
12 |
2 |
13 |
|
3 |
|
1F |
|
|
R21Z1 |
+ R22 Z2 |
+ R23 Z3 |
+ R 2F = 0; |
(4.20) |
|||||||
R31Z1 + R32 Z2 + R33 Z3 + R 3F = 0. |
|
||||||||||
Как видно, форма канонических уравнений при группировке неизвестных остается прежней. Но здесь все эпюры от единичных неизвестных (рис. 64, в-д) будут только симметричными или обратносимметричными, а канонические уравнения распадутся на две независимые системы, содержащие только симметричные или только обратносимметричные групповые неизвестные. При этом неизвестные перемещения узлов, расположенных на оси симметрии,
149

всегда обладают симметрией или обратной симметрией и поэтому не группируются.
Рис. 64
Значения единичных коэффициентов и свободных членов в уравнениях (4.20) приобретают несколько иной смысл, чем ранее. Здесь Rij и RiF - обобщенные реакции, соответствующие обобщенному перемещению Zi от парного смещения Z j и от внешней нагрузки. Эти обобщенные реакции определяются как алгебраические суммы простых реакций в связях, которые
150