

8 Системы автоматического управления и регулирования
8.1 Системы автоматического управления (сау)
САУ предназначены для решения основной задачи управления – достижения определённой цели. При этом весь процесс управления сводится к трем основным действиям:
1. - Получение информации о состоянии объекта управления (объекта автоматизации). При этом информация должна поступать непрерывно и с достаточно высокой точностью.
2. - Переработка этой информации для принятия решения на соответствующее управление объектом автоматизации, в зависимости от его состояния на данный момент времени.
3. - Передача информации в виде сигнала управления на объект автоматизации, чтобы осуществить на него необходимое определённое воздействие.
На рис.8.1 представлена обобщённая структура взаимосвязи САУ и объекта автоматизации, работа которого характеризуется, прежде всего, его выходными параметрами – хвых..

Рис.8.1. Структурная схема взаимосвязи объекта автоматизации
и системы автоматического управления
Здесь хвх - входная величина, представляющая собой требуемое управляющее воздействие, с помощью которого должна достигаться основная цель управления. При этом на объект автоматизации всегда может действовать какое-либо возмущающее воздействие - zв , изменяющее выходные параметры объекта. Следует заметить, что природа подобных воздействий часто зависит и от характера самого объекта автоматизации, а они могут быть как полезными, так и вредными. Поэтому система автоматического управления, в зависимости от входной величины и с учетом возмущающих воздействий, должна вырабатывать соответствующий сигнал управления – ху, закон изменения которого получил название алгоритм управления.
В теории САУ различают два класса алгоритма управления:
- детерминированный, т.е. наперед заданный определённой последовательностью и соответствующей программой алгоритм;
- информационный, т.е. переменный алгоритм управления в зависимости от окружающих условий работы объекта автоматизации. Этот класс более сложный и, очень часто используется совместно с электронными вычислительными машинами (ЭВМ).
Все системы автоматического управления делятся на следующие классификационные группы:
Системы оптимальные по быстродействию, в которых управление объектом осуществляется за минимально возможное время.
Системы программного управления, осуществляющие управление по заранее составленной определённой программе. При этом требуемая программа, чаще всего в настоящее время, задается в цифровом виде с помощью специального задающего устройства
Экстремальные системы, в которых управляемые параметры объекта выводятся на максимальные или минимальные значения и там удерживаются. В такие системы включается специальное устройство, которое определяет отклонение регулируемого параметра от экстремального значения и формирует в связи с этим соответствующий сигнал управления
Функциональные системы. В них управление объектом автоматизации осуществляется только при выполнении определённых, заранее заданных, функциональных зависимостей или предварительных расчётов.
Системы автоматического управления в зависимости от их структуры могут быть, прежде всего, разомкнутые, в которых нет контроля выходных параметров объекта автоматизации. В таких системах отсутствует обратная связь (ОС). Но в настоящее время наиболее широко применяются замкнутые системы автоматического управления.
В замкнутых системах автоматического управления осуществляется непрерывный контроль выходных параметров объекта автоматизации. Для этого в такие системы вводится обратная связь, представляющая собой, чаще всего, измерительную систему, т.е. систему контроля, которая по своей структуре может быть, в некоторых случаях, сложнее самой системы управления. Но при этом в замкнутых системах исключается влияние многих возмущающих воздействий, действующих на объект автоматизации.
Наибольшее применение системы автоматического управления получили для автоматизации работы силовых и тяговых электродвигателей на транспорте, в строительстве и разного вида электромеханических и электромагнитных исполнительных устройств. Подобные системы были рассмотрены в разделе «Электроприводы».
Широко применяются системы автоматического управления в строительно-дорожных машинах с гидравлическим силовым приводом, некоторым из которых посвящен последний раздел настоящего учебного пособия
.Следует заметить, что структура систем автоматического регулирования, которым уделено внимание в следующем подразделе, подобна структуре систем управления. Для расчета и тех и других используется один и тот же математический аппарат и аналогичные методы исследования, но отличие этих систем друг от друга можно проследить на следующем графике (рис.8.2).
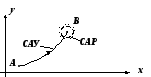
Рис. 8.2. Сравнительное назначение и отличие САУи САР
Допустим, что какой-либо объект необходимо переместить из точки А в точку В. Это перемещение по соответствующей траектории, в зависимости от классификационной группы и выполняет система автоматического управления (САУ). Но после перемещения в точку В необходимо объект в этой точке удержать, и вот это удержание выполняется с помощью системы автоматического регулирования (САР).
Из этого следует, что системы автоматического управления более сложные, чем системы автоматического регулирования, так как их работа связана с более значительными перемещениями, как самого объекта, так и диапазона изменения его управляемых (или регулируемых) параметров.
Поскольку программа нашей дисциплины посвящена основам автоматики и автоматизации, остановимся в дальнейшем только на рассмотрении структуры систем автоматического регулирования, их устройству и работе применительно к конкретным условиям их применения.