

8.2 Системы автоматического регулирования (сар)
Основное назначение САР заключается в поддержании выходных параметров объекта автоматизации на определенном заданном уровне или изменение этих параметров по определенному закону.
Как и системы автоматического управления системы регулирования бывают также разомкнутыми и замкнутыми, т.е. с элементами обратной связи и без них.
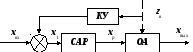
Так в разомкнутых системах регулирования для компенсации вредных возмущающих воздействий, действующих на объект автоматизации, часто используют специальные корректирующие устройства - КУ, подключаемые на вход системы согласно рис.8.3.
хку
Рис. 8.3 Структура САР с корректирующим устройством
Здесь самый первый элемент на входе системы регулирования выполняет функции суммирующего устройства , которое вырабатывает сигнал х1, равный сумме входного сигнала хвх и сигнала, поступающего с корректирующего устройства. С учетом этого возмущающего воздействия и входного сигнала и САР вырабатывает соответствующий сигнал регулирования хр для дальнейшего воздействия на объект регулирования.
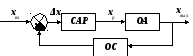
Но все возмущающие воздействия в разомкнутой системе скомпенсировать не удается. Поэтому большинство современных систем и регулирования и управления структурно строятся, в основном, замкнутыми, т.е. с использованием обратной связи – ОС (рис.8.4).
хос
Рис.8.4. Структурная схема замкнутой САР
С помощью обратной связи в таких системах осуществляется постоянный контроль выходных параметров объекта управления или регулирования и вырабатывается соответствующий сигнал обратной связи хос, поступающий на элемент сравнения, где он непрерывно сравнивается с входной величиной хвх , поступающего с задающего устройства, и вырабатывается разностный сигнал ∆х = хвх – хос и, в соответствии с этим, сигналом хр система регулирования воздействует на объект автоматизации.
В некоторых случаях системы автоматического регулирования структурно строятся комбинированными, т.е. с компенсацией ошибок, в которых используются два принципа регулирования - по замкнутому и по разомкнутому циклу регулирования (рис.8.5).
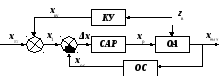

Рис.8.5. Структурная схема комбинированной САР
Но такие системы более сложные, что требует кроме материальных затрат на их изготовление и более дорогое их обслуживание. Так на рис.8.6 представлена наиболее полная структура большинства систем автоматического регулирования и управления с функциональной взаимосвязью всех элементов, составляющих эти системы. Подобная, достаточно сложная, структура таких систем используется, чтобы обеспечить их устойчивость и более высокие показатели качества при эксплуатации.
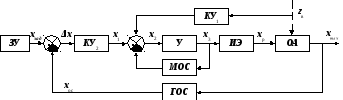
РРис.8.6. Структурная схема систем автоматического
управления и регулирования
ЗУ – задающее устройство, с помощью которого устанавливается требуемое значение выходных параметров на объекте автоматизации ОА (управления или регулирования).
КУ1 – корректирующее устройство для компенсации возмущающего воздействия zв на объект автоматизации.
ИЭ – исполнительный элемент, оказывающий непосредственное воздействие на объект автоматизации.
ГОС – главная обратная связь, с помощью которой осуществляется постоянный контроль выходных параметров объекта автоматизации хвых.
У – усилитель, предназначенный для усиления сигнала х2..
МОС – местная обратная связь (параллельное корректирующее устройство) для улучшения качества используемого в системе усилителя.
КУ2 – последовательное корректирующее устройство для дополнительной обработки сигнала ошибки ∆х.
Однако, при дальнейшем рассмотрении систем автоматического регулирования (а также управления) за их основу примем более общую (ключевую) структурную схему (рис.8.7), составленную только из основных функциональных узлов, таких как: задающее устройство ЗУ, элемент сравнения ЭС, усилитель У, если он необходим, исполнительный элемент ИЭ и элемент обратной связи ОС.
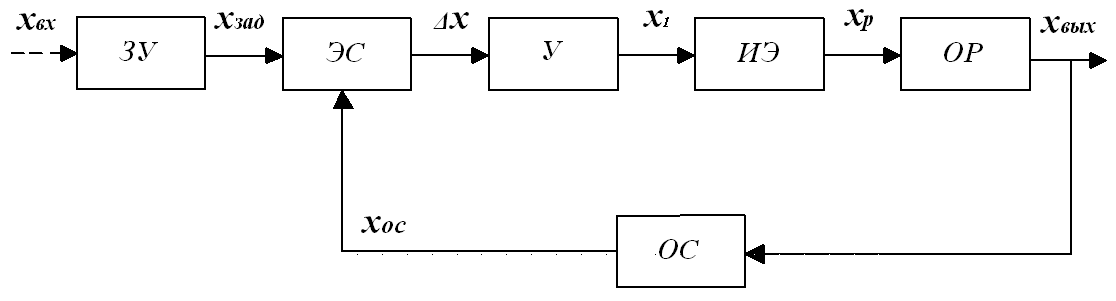
Рис.8.7. Структурная схема системы автоматического управления и регулирования, представленная только основными элементами.
В зависимости от назначения и работы все системы автоматического регулирования делятся на следующие три основные классификационные группы:
1. Системы автоматической стабилизации, в которых выходная величина на объекте автоматизации поддерживается постоянной.
2. Системы программного регулирования. В таких системах выходные параметры объекта автоматизации изменяются по заранее составленной программе. При этом сама программа может задаваться либо с помощью специальных копиров или чертежей, либо, чаще всего, в цифровом виде с использованием современных носителей информации.
3. Следящие системы, в которых закон изменения входной величины хвх, поступающей на вход задающего устройства, заранее неизвестен и может в процессе работы непрерывно изменяться в зависимости от окружающих условий. Но при этом система регулирования должна следить за этими изменениями и в соответствии с ними регулировать выходные параметры объекта автоматизации.
Перечисленная классификация систем автоматического регулирования, в конечном счёте, определяется характером задающего устройства, используемого в системе. Так в системах автоматической стабилизации задающее устройство вырабатывает постоянный по величине сигнал ( хзад = const ).
В системах программного регулирования сигнал с задающего устройства изменяется ( х зад = var ), но по заранее составленной определенной программе.
В следящих системах величина заданного сигнала зависит от неизвестного по величине входного воздействия, поступающего на вход задающего устройства. А система регулирования, в результате, определяет это воздействие (т.е. отслеживает его) и вырабатывает соответствующий сигнал регулирования - хр в соответствии с законом изменения этого входного воздействия.