

4.Як заміну можна представити наступний варіант вимірювання:
Як зазначалось раніше для управління процесом в котлі внутрішнього згорання необхідно контролювати наступні параметри:
1.Термоелектричні перетворювачі(термопари)-принцип дії термопар заснований на термоелектричному ефекті, який полягає в тому, що при наявності різниці температур місць зєднань двох різнорідних металів або напівпровідників в контурі виникає ЕРС що називається термоелектрорушійною (скорочено термо-ЕРС ). В певному інтервалі температур можна рахувати, що термо-ЕРС прямо пропорційна різниці температур ∆Т=Т1-Т0 між спаями 1 і кінцями 2 термопари.
Термоелектричні перетворювачі виготовляють наступних типів: ТВР – термоелектричний перетворювач вольфрамренієвий; ТПР – платинородний; ТПП – платинородій-платиновий; ТХА – хромель-алюмель; ТХК – хром ель-копелєвий.

Рис.8 Введення поправки на зміну температури вільних кінців термоелектричного перетворювача
З’єднані між собою кінці 1 термопари, що занурюються в середовище, температура якого змінюється, називають робочим кінцем термопари . Кінці 2, які знаходяться в навколишньому середовищі, і які за звичай приєднуються проводами до вимірювальної схеми, називають вільними кінцями. Температура цих кінців необхідно підтримувати постійною. При цій умові термо-ЕРС Ет буде залежати тільки від температури Т1 робочого кінця.
Uвих=Ет=С(Т1-Т0),
де С – коефіцієнт, що залежить від матеріалу термопари.
ЕРС що створюється термопарами порівняно невелика, вона не перевищує 8 мВ на кожні 100°С та за звичай не перевищує по абсолютній величині 70мВ. Термопари дозволяють вимірювати температуру в діапазоні від -200 до +2200° С.
Найбільше розповсюдження для виготовлення термоелектричних перетворювачів отримала платина, платинородій, хромель, алюмель.
Термопари мають слідуючі переваги: простота виготовлення і надійність в експлуатації, дешевизна, відсутність джерел живлення і можливість вимірювання в великому діапазоні температур, механічні ж термометри мають порівняну не високу точність, що пов’язано з недоліками механічної системи, і значну інерційність.
2.
Принципова
схема витратоміра електромагнітного
типу показана на
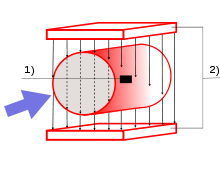 рисунку.
У стінки патрубка діаметрально протилежно
в одному поперечному перерізі введені
електроди 1. До електродів підключено
високочутливий електровимірювальний
прилад, шкала якого проградуйована в
одиницях швидкості або одиницях витрати.
Патрубок, що вмонтований у трубопровід,
по якому рухається електромагнітна
рідина розміщений у магнітному полі,
що створюється котушками індуктивності
(індукторами) 2.
рисунку.
У стінки патрубка діаметрально протилежно
в одному поперечному перерізі введені
електроди 1. До електродів підключено
високочутливий електровимірювальний
прилад, шкала якого проградуйована в
одиницях швидкості або одиницях витрати.
Патрубок, що вмонтований у трубопровід,
по якому рухається електромагнітна
рідина розміщений у магнітному полі,
що створюється котушками індуктивності
(індукторами) 2.
Патрубок витратоміра виготовляють з електроізоляційного матеріалу: фторопласту, поліетилену, ебоніту, гуми та інших матеріалів в залежності від властивостей вимірюваної рідини.
Переваги
Електромагнітні витратоміри мають низку переваг:
майже повна безінерційність приладу, що дуже важливо для вимірювання витрат, що швидко змінюються при використанні їх у складі систем автоматичного регулювання;
на результат вимірювань не впливає наявність завислих часток у рідині і бульбашок газу;
покази витратоміра не залежать від властивостей контрольованої рідини (в’язкості, густини) і характеру потоку (ламінарний, турбулентний);
при відповідному підборі матеріалу із застосуванням антикорозійного та інших покриттів електромагнітні витратоміри можна застосовувати для вимірювання витрати агресивних рідин, а також рідин і паст з абразивними властивостями;
на основі лінійної залежності наведеної ЕРС від витрати шкала приладу є лінійною;
цим витратомірам властивий достатньо широкий діапазон вимірювання витрат;
перетворювачі електромагнітних витратомірів не мають рухомих елементів та звужень.
Недоліки
До недоліків електромагнітних витратомірів слід віднести необхідність компенсації завад, що виникають при змінному полі у колі електродів, а також неможливість вимірювання витрат газів і рідин з малою електропровідністю (спирти, мастила, бензин та інші легкі нафтопродукти). Неприпустимо застосовувати електромагнітні витратоміри поблизу електросилових пристроїв, які утворюють сильні електромагнітні поля, а також для потоків рідини із завислими феромагнітним частками.
Через складність підсилення сталих напруг витратоміри з постійним магнітним полем використовують дуже рідко.
-
Ультразвукові рівнеміри
Ультразвуковий метод контролю набув широкого поширення в хімічній та інших галузях промисловості, так як
Забезпечує безконтактне вимірювання рівня агресивних, вибухонебезпечних середовищ при високих температурах і тиску.
Він дозволяє створити суцільнозварну конструкцію вимірювального елемента. На ультразвуковому методі будуються як рівнеміри, так і сигналізатори рівня.
За принципом дії їх можна розділити на три групи:
- Рівнеміри, що працюють за принципом ультразвукової локації;
- За принципом «проходження»;
- Демпфування.
У рівнеміра, що працюють за принципом локації через рідину або через газ (рис. 5, а, б). Мірою рівня служить час поширення імпульсу до кордону розділу середовищ і назад.
Недоліком рівнемірів, що працюють за принципом локації через рідина є залежність їх свідчень від властивостей рідини і домішок, які в ній знаходяться. Метод локації через газ не має цих недоліків, але при випромінюванні ультразвуку в газовому середовищі відбувається велика втрата енергії на розсіювання.
За принципом «проходження» будується робота сигналізаторів рівня (рис. 5, в). Сигналізатор містить два щупа. Принцип роботи заснований на залежності проходження енергії ультразвукових хвиль від випромінювача до приймача від акустичного опору середовища в сигнальному зазорі між щупами.
Принцип з роботи заснований на зміні величини енергії ультразвукових хвиль, що проходять з одного середовища в іншу, зумовлене різними акустичними опорами середовищ. Недолік сигналізаторів, що працюють на принципі «проходження» - можливість помилкових спрацьовувань при наявність бульбашок повітря в сигнальному зазорі. Це виключає їх застосування при барботаже контрольованої рідини повітрям. Працездатність сигналізатора порушується і при наявності опадів на випромінювачі і приймачі в сигнальному зазорі.
5 Розрахунок і побудова графіку перехідного процесу вимірювального перетворювача
Хнач = 3.5; Хкін = 4.9; Коеф D = 0,9; момент скачка t1= 2.9 с; T= D; jmax= ±1%.
Графік перехідного процесу вимірювального перетворювача є аперіодичною ланкою і розраховується за формулою:
Y(t)
= Yнач
+
(Yкін
-
Yнач
)·(1-е )
(1.1)
)
(1.1)
Yнач = к·хнач = 3.6·3.5 = 12.6
Yкін= к·хкін = 3.6·4.9 = 17.64
К = 4·D = 3.6
Y(3,2) = 14
Y(3,4) =14,75
Y(3,6) = 15,3
Y(3,8) =15,75
Y(4,0) =16,1
Y(4,2) = 16,4
Y(4,4) =16,6
Y(4,8) = 16,9
Y(5,2) =17,21
Y(5,6) =17,35
Y(5,8) = 17,4
Y(6,0) =17,44
Y(6,2) = 17,47
Похибка приладу.
jроз= ·100%
(1.2)
·100%
(1.2)
Розрахунок закінчено, графік вийшов на своє кінцеве значення Υкін=6.97
Перехідна функція
W(р)=к/(Тр+1), (1.3)
де р- змінна Лапласа;
W(р)=1.6/(02·р+1)
6. Розрахунок довірчого інтервалу за рядом , багатократних прямих вимірювань.
Вихідні дані:
-
Шкала вимірювального приладу Хнорм= -100…+100
-
Клас точності приладу jmax=1.0
-
Кількість вимірювань n=16
-
Розрахунковий коефіцієнт Стьюдента tр=2,131
-
Довірча імовірність Р=0,95
Таблиця 5.1- Обробка результатів прямих вимірювань
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
|
Хі |
70 |
71 |
72 |
69 |
68 |
69 |
72 |
73 |
73 |
71 |
70 |
71 |
73 |
69 |
69 |
70 |
|
Хі-|X| |
-0.6 |
0.4 |
1.4 |
-1.6 |
-2.6 |
-1.6 |
1.4 |
2.4 |
2.4 |
0.4 |
-0.6 |
0.4 |
2.4 |
-1.6 |
-1.6 |
-0.6 |
|
(Хі-X|)2 |
0.36 |
0.16 |
1.96 |
2.56 |
6.76 |
2.56 |
1.96 |
5.76 |
5.76 |
0.16 |
0.36 |
0.16 |
5.76 |
2.56 |
2.56 |
0.36 |
В результаті обробки ряду вимірювань необхідно отримати результати в слідуючому вигляді
Х=Х±∆Х,
де Х – математично очікувана величина для нормального закону розподілення (середньоарифметичний результат вимірювань);
∆Х – довірча границя результату обробки ряду вимірювань.
На величину довірчої границі ∆Х будуть вказувати вплив систематична та випадкові похибки.
Довірчим інтервалом називається інтервал значень оцінюваної величини який з заданою випадковістю накриває дійсне значення цієї величини.
Систематична похибка визначається похибкою методу, конструкцією приладу, встановленням приладу.
Випадкова похибка визначається випадковим збігом факторів які впливають на вимірювання, які не можливо врахувати.
Довірча імовірність для звичайних технологічних систем задається імовірністю 0,95.
1 Визначимо систематичну похибку Ѳ, яка характеризується відхиленням і визначається паспортними даними приладу.
Ѳ→αmax
дот= ,
(1.4)
,
(1.4)
де Хнорм – діапазон шкали вимірювального приладу;
γmax – приведена похибка, або клас точності приладу.
Ѳ→αmax
дот= =2
=2
2 Визначимо математично очікувану величину (середнє арифметичне ряду вимірювань).
 =М[Х]=
=М[Х]=
 (1.5)
(1.5)
 =
=
3 Визначимо середньоквадратичне відхилення середньоарифметичного
Sх= ;
(1.6)
;
(1.6)
Sх= ;
;
Середньоквадратичне відхилення середньоарифметичного склало Sх=0,589
4 Визначимо випадкову похибку вимірювання
ε=tр· Sх , (1.7)
де tр – розрахунковий коефіцієнт Стьюдента, який має різне значення для різної довірчої імовірності і різної кількості вимірювань.
ε=2,131·1,09=2,32
Визначили випадкову похибку, вона склала ε=1,27
Аналіз від співвідношення між випадковою і систематичною похибками вимірювань, довірча границя яких розглядається по трьом умовам:
а) Якщо Ѳ/ Sх≤0,8 то випадковою похибкою можна знехтувати и прийняти довірчу границю похибки ряду вимірювань як ∆Х=±ε.
б) Якщо Ѳ/ Sх ≥0,8 то систематичною похибкою можна знехтувати і прийняти довірчу границю похибки ряду вимірювань як ∆Х=Ѳ.
в) Якщо обидві умови довірчої імовірності не виконуються то дана нерівність записується в такому вигляді: 0,8≤Ѳ≤8,0
Ѳ/ Sх =1/0,589=1,698
Таким чином задача вирішується по третій умові.
5 Знаходимо довірчу границю похибки вимірювань ∆Х за формулою.
∆Х=К·Sε,
де К- співвідношення розброду середньоквадратичного відхилення середньоарифметичної і систематичної похибки вимірювань. Коефіцієнт співвідношення К визначаємо за емпіричною формулою.
К= =
= =1.92
(1.8)
=1.92
(1.8)
6 Визначаємо СКВ випадкової похибки вимірювань
Sε
=
 ,
(1.9)
,
(1.9)
де Ѳ- систематична похибка;
Sх -середньоквадратичне відхилення середньоарифметичного.
Sε
= =1.58
=1.58
7 Визначимо довірчу границю ∆Х
∆Х=
Таким чином результат вимірювань записуємо в слідуючому вигляді
Х= (1.10)
(1.10)
Х=70.6±3.03
7 Висновок
Була проведена розрахунково-графічна робота. Розглядався проект покращення контролю параметрів в котлі внутрішнього згорання. В наслідок проведених робіт на цій машині були замінені датчик витрати палива (Ротаметр) на витратомір електромагнітного типу,манометричній термометр на термопару. Також був замінений ємнісний рівномір, що відноситься до контактних датчиків, на безконтактний – ультразвуковий. В результаті чого другий виявився набагато ефективнішим. З допомогою встановленої термопарі збільшилась точність вимірювання температури води. З допомогою встановленого витратоміру електромагнітного типу збільшилась точність вимірювання, а також зручність використання так-як прилад являється безконтактним)). В цій роботі були проведені розрахунки довірчої границі результату ряду вимірювань багатократних прямих вимірювань а результати звели до таблиці. Також проводили розрахунок перехідного процесу вимірювального перетворювача після чого за результатами розрахунків будували графік.