

2.5. Решение уравнений состояния n-го порядка
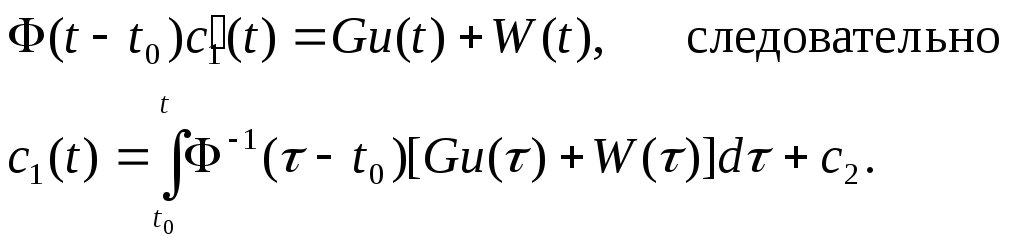
Рассмотрим уравнение состояния стационарного управляемого объекта
![]()
u-
вектор входных воздействий, W
- вектор возмущающих воздействий. Задача
состоит в вычислении
![]() при
при![]() .
.
Уравнению
(1) соответствует однородное уравнение
![]() ,
решение которого равно
,
решение которого равно![]()
Введя
обозначение ![]() решение можно представить в виде:
решение можно представить в виде:
![]()
Пусть решение неоднородного уравнения (1) равно:
![]() (2)
(2)
Дифференцируя уравнение (2) по t, получим
![]() (3)
(3)
Сравнивая (1) и (3) , имеем
Решение уравнения
 (4)
(4)
В
уравнении (4) учтено, что
![]() не зависит от переменной интегрирования
и
не зависит от переменной интегрирования
и
![]()
Вектор
![]() вычисляется по начальным условиям
вычисляется по начальным условиям![]() .
.
Окончательная форма решения уравнения

Отметим,
что
![]() - называется фундаментальной матрицей
системы, для которой верны свойства:
- называется фундаментальной матрицей
системы, для которой верны свойства:

3. Элементы теории матриц
3.1. Линейные векторные пространства
Множество
векторов
![]() называется
линейным векторным пространством, если
для любых двух векторов определена
операция сложения и для любого вектора
определены операции умножения на число,
при выполнении аксиом сложения векторов
и умножения на скаляр. Простейший пример
векторного пространства – множество
упорядоченных пар действительных чисел
называется
линейным векторным пространством, если
для любых двух векторов определена
операция сложения и для любого вектора
определены операции умножения на число,
при выполнении аксиом сложения векторов
и умножения на скаляр. Простейший пример
векторного пространства – множество
упорядоченных пар действительных чисел![]() .
Геометрическим представлением такого
линейного
векторного пространства является
плоскость. Это пространство называется
двумерным Евклидовым пространством
.
Геометрическим представлением такого
линейного
векторного пространства является
плоскость. Это пространство называется
двумерным Евклидовым пространством
![]() .
.
МЕТРИКА
Расстояние
![]() между двумя векторами
между двумя векторами![]() задают с помощью метрики
задают с помощью метрики![]() ,
удовлетворяющей следующим аксиомам:
,
удовлетворяющей следующим аксиомам:

Пусть
и
векторы пространства
![]() .
.

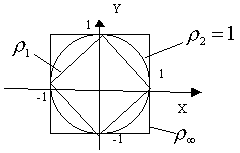
Вычислим расстояние между векторами для каждой из приведенных выше метрик.

В
каждой из этих метрик можно определить
единичную окружность как множество
всех точек расстояние которых от начала
координат
![]() .
.
Линейное
векторное пространство
![]() называетсянормированным,
если каждому вектору
называетсянормированным,
если каждому вектору
![]() можно
поставить в соответствие неотрицательное
число
можно
поставить в соответствие неотрицательное
число![]() ,
называемое нормой, удовлетворяющее
следующим свойствам:
,
называемое нормой, удовлетворяющее
следующим свойствам:
1.
![]() тогда и только
тогда, когда х=0,
тогда и только
тогда, когда х=0,
2.
![]() ,
,
3.
![]() .
.
В
нормированном пространстве можно ввести
метрику по формуле
![]() .
.
Норму
вектора можно определить через метрику
как расстояние между вектором и нулевым
вектором:
![]() .
.
Размерность.
Линейное векторное пространство
![]() называется конечномерным, а числоn
называется размерностью пространства,
если существует n-линейно
независимых векторов из
называется конечномерным, а числоn
называется размерностью пространства,
если существует n-линейно
независимых векторов из
![]() и
любые
и
любые![]() векторов из
векторов из![]() линейно зависимы.
линейно зависимы.
Если пространство содержит сколь угодно большого количества линейно независимых векторов, то оно называется бесконечно мерным пространством.
Базис-
множество линейно независимых векторов
![]() называется базисом линейного векторного
пространства
называется базисом линейного векторного
пространства![]() ,
если любой вектор
,
если любой вектор![]() представляется в виде:
представляется в виде:
![]() -
числа (определяются однозначно).
-
числа (определяются однозначно).
Преобразование
![]() называется оператор, отображающий
пространство
называется оператор, отображающий
пространство![]() ,
то есть преобразование сопоставляет
каждомуn-вектору
,
то есть преобразование сопоставляет
каждомуn-вектору
![]() только один m-вектор
только один m-вектор
![]() и записывается в виде
и записывается в виде
![]() .
.
Преобразование
Т называется однозначным, если при любом
![]()
Преобразование
Т называется линейным если
![]() ,
где
,
где![]() .
.
Линейному
преобразованию Т можно сопоставить
![]() матрицу А, т.е.
матрицу А, т.е.![]() .
.
3.2. Собственные векторы и собственные значения
Множество
![]() называется линейным подпространством,
если
называется линейным подпространством,
если![]() и для любых
и для любых![]() .
Подпространство
.
Подпространство![]() называется инвариантным подпространством
относительно преобразования Т, если
для любого
называется инвариантным подпространством
относительно преобразования Т, если
для любого![]() В действительном пространстве
В действительном пространстве![]() одномерное пространство- это прямая
проходящая через начало координат. Если
одномерное пространство- это прямая
проходящая через начало координат. Если![]() (где
(где![]() )инвариантное
подпространство линейного подпространства
Т, то в силу определения инвариантного
подпространства дает нам результат
)инвариантное
подпространство линейного подпространства
Т, то в силу определения инвариантного
подпространства дает нам результат![]() где-
число .
где-
число .
Используя
матричное представление преобразования
получим
![]() ,
сократим на
, получим
,
сократим на
, получим
![]() .
.
Если
не нулевой вектор![]() удовлетворяет этому соотношению, то
ему удовлетворяет также любой вектор
полученный умножением
удовлетворяет этому соотношению, то
ему удовлетворяет также любой вектор
полученный умножением![]() на
любое действительное или комплексное
число. Следовательно, вектор
на
любое действительное или комплексное
число. Следовательно, вектор![]() определяет одномерное инвариантное
подпространство преобразования Т,
представленное в базисе
определяет одномерное инвариантное
подпространство преобразования Т,
представленное в базисе![]() матрицы А. Уравнение
матрицы А. Уравнение![]() представляет собой систему линейных
однородных алгебраических уравнений.
Эта система имеет однозначное решение
представляет собой систему линейных
однородных алгебраических уравнений.
Эта система имеет однозначное решение![]() ,
если только
,
если только![]() .
.
Значение
вектора
![]() всегда является решением такой системы.
С другой стороны, если
всегда является решением такой системы.
С другой стороны, если![]() ,
то решение будет не единственным и
нетривиальное решение (
,
то решение будет не единственным и
нетривиальное решение (![]() )
в этом случае существует.
)
в этом случае существует.
Определим
характеристический полином как:![]() где
где![]() и
и![]() .
.
Корни
характеристического уравнения
![]() называютсясобственными
значениями
или характеристическими числами матрицы
А.
называютсясобственными
значениями
или характеристическими числами матрицы
А.
Из
основной теоремы алгебры следует, что
характеристическое уравнение
![]()
![]() имеетn
корней, некоторые из которых могут
совпасть, а некоторые могут быть
комплексными.
имеетn
корней, некоторые из которых могут
совпасть, а некоторые могут быть
комплексными.
Каждому
собственному значению из набора
![]() соответствует член из множествасобственных
векторов,
т.е. собственный вектор
соответствует член из множествасобственных
векторов,
т.е. собственный вектор
![]() является ненулевым решением уравнения
является ненулевым решением уравнения![]() .
.
Если
все собственные значения различны, n
соответствующих собственных векторов
линейно независимы и следовательно
образуют базис пространства
![]() .
.
Пример
Рассмотрим линейное преобразование А:
![]() .
Запишем его характеристический полином
.
Запишем его характеристический полином

Для
нахождения собственного вектора,
соответствующего значению
![]() , рассмотрим систему
, рассмотрим систему

Поэтому
собственный вектор, соответствующий
собственному значению
![]() ,
имеет вид
,
имеет вид
 ,
отметим, что он не единственный
,
отметим, что он не единственный
 и т.д. .
и т.д. .
Для
![]() , имеем систему
, имеем систему![]() или
или

Собственный
вектор, соответствующий собственному
значению
![]() ,
имеет вид
,
имеет вид
 .
.