

Завдання 3 Розв’язок систем нелінійних рівнянь
Звіт по роботі повинен включати:
-
Теоретичну частину.
-
Постановку задачі.
-
Графічне відокремлення коренів, уточнення за допомогою X-Y Trace.
-
Обчислення системи нелінійного рівняння за допомогою вбудованих функцій.обчислити корені системи нелінійних рівнянь за допомогою вбудованої функції Minerr;
5.Обчислення системи нелінійного рівняння методом Ньютона
1. На відміну від СЛАР для систем нелінійних рівнянь (СНР) не існує прямих методів розв’язку, а тому їх розв’язують лише ітераційними способами. В загальній формі СНР записується так:
 ,
(6.3)
,
(6.3)
або
в векторній формі
![]() ,
де Х
– вектор невідомих,
,
де Х
– вектор невідомих,
![]() – вектор-функція.
– вектор-функція.
Для одержання ітераційної формули створення процесу прямої ітерації приведемо систему (6.3) до вигляду:
що
в векторній формі записують
![]() .
.
Задавши
початкове значення вектора невідомих
![]() ,
одержуємо ітераційний процес:
,
одержуємо ітераційний процес:
![]() і т.д., допоки різниця норм векторів Х
на сусідніх ітераціях не стануть менше
наперед заданого малого числа :
і т.д., допоки різниця норм векторів Х
на сусідніх ітераціях не стануть менше
наперед заданого малого числа :
![]() .
.
Недоліком
таких процесів є те, що початкове значення
![]() потрібно вибирати лише в зоні
збіжності
поблизу точки розв’язку. Цю зону
визначають із фізичних властивостей
процесів чи об’єктів, режим роботи яких
описується даною системою нелінійних
рівнянь. В двовимірному просторі зону
збіжності можна визначати графічно.
потрібно вибирати лише в зоні
збіжності
поблизу точки розв’язку. Цю зону
визначають із фізичних властивостей
процесів чи об’єктів, режим роботи яких
описується даною системою нелінійних
рівнянь. В двовимірному просторі зону
збіжності можна визначати графічно.
Наступним
обмеженням застосування метода прямої
ітерації є те, що для створення збіжного
ітераційного процесу перетворення
![]() потрібно здійснити таким чином, щоб
потрібно здійснити таким чином, щоб
![]()
2. Завдання.
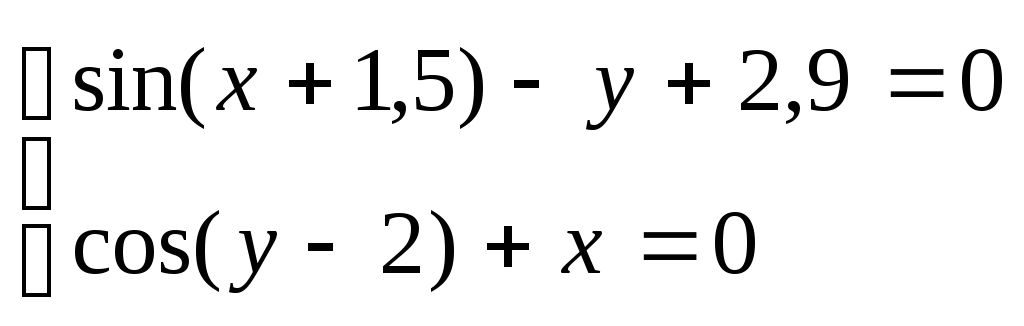
3.Графічне відокремлення кореня, уточнення за допомогою X-Y Trace

4.Обчислення системи нелінійного рівняння за допомогою вбудованих функцій Minerr
Minerr;

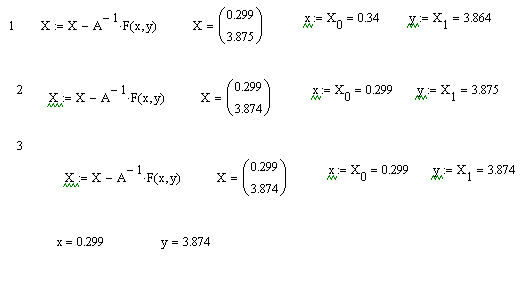
5.Обчислення системи нелінійного рівняння методом Ньютона

Завдання 4 рішення систем лінійних рівнянь
Звіт по роботі повинен включати:
-
Теоретичну частину.
-
Постановку задачі.
-
Рішення СЛАР матричним методом.
-
Методом Крамера.
-
Рішення СЛАР за допомогою вбудованої функції lsolve.
-
Методом Гауса.
1. Систему n лінійних алгебраїчних рівнянь (СЛАР) з n невідомими можна представити у вигляді:
|
|
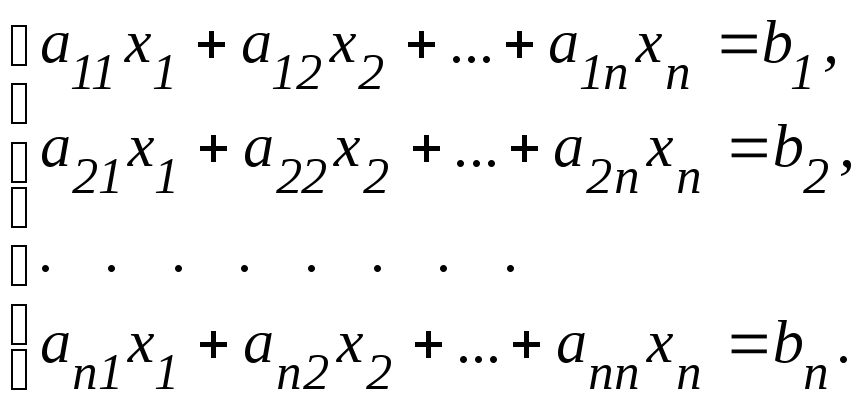 (5.1)
(5.1)Ця система в матричному представленні має вигляд:
|
Ах = b, |
або
|
|
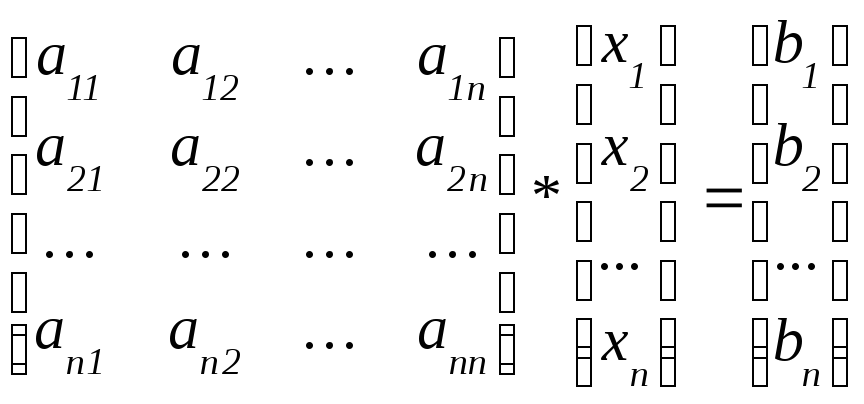 ,
,де а – матриця коефіцієнтів системи;
х – вектор невідомих;
b – вектор вільних членів.
Розв’язком
СЛАР є сукупність чисел
![]() ,
які при підстановці їх на місце
,
які при підстановці їх на місце
![]() перетворюють всі рівняння (5.1) в тотожність.
перетворюють всі рівняння (5.1) в тотожність.
Якщо
визначник матриці А
не дорівнює 0, систему називають сумісною.
При
![]() СЛАР немає розв’язку (система несумісна).
СЛАР немає розв’язку (система несумісна).
Всі методи розв’язку сумісних СЛАР поділяються на прямі і ітераційні. В прямих методах розв’язок одержують за цілком певної кількості використаних арифметичних дій. До цих методів відносяться метод виключення невідомих Гауса, застосування формул Крамера, різні методи обернення матриць коефіцієнтів системи (рисунок 18-а).
Недоліком прямих методів розв’язку СЛАР є те, що зі збільшенням порядку системи збільшується похибка одержаного результату за рахунок збільшення операцій з неточними числами.
В ітераційних методах розв’язок системи знаходять в результаті багаторазових повторень однотипних операцій (ітерацій). Збільшуючи кількість таких повторень можна одержати результат з будь-якою наперед заданою точністю. Тому найчастіше при одержанні розв’язку СЛАР на комп’ютері застосовують саме ітераційні методи. До них відносяться прямий ітераційний метод, метод Зейделя, різного роду рекурентні методи.
Так як прямі методи досить детально вивчалися в курсі вищої математики, розглянемо побудову простого ітераційного процесу. Для одержання його ітераційної формули розв’яжемо кожне рівняння системи (5.1) по відношенню до свого невідомого. Тобто перше рівняння розв’яжемо по відношенню до х1, друге по відношенню до х2 і т.д. Одержимо систему:
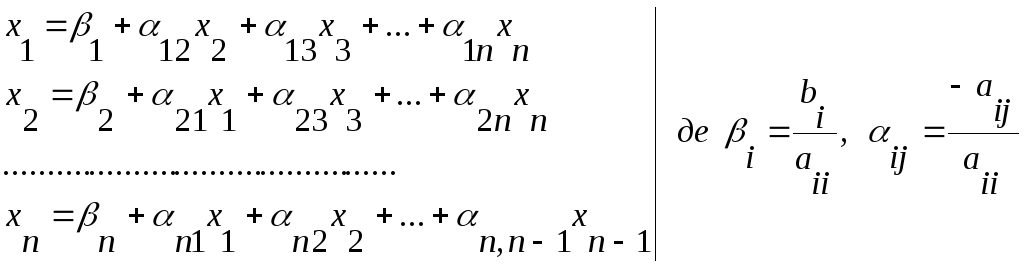 .
.
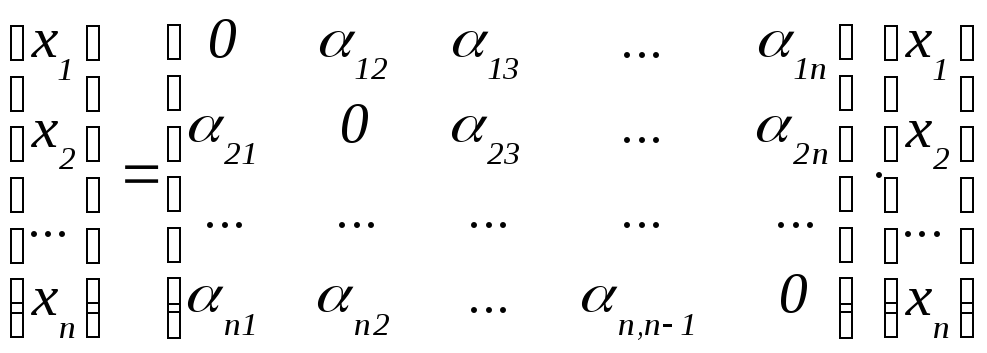
У вигляді матриць вона має вигляд:
 або
або
![]() .
.
Якщо тепер задатись початковим значенням Х(0), то можна одержати ітераційний процес:
![]() і
т.д. допоки елементи вектора Х
на двох сусідніх ітераціях з заданою
точністю не стануть близькими один до
одного (рисунок 18-б).
і
т.д. допоки елементи вектора Х
на двох сусідніх ітераціях з заданою
точністю не стануть близькими один до
одного (рисунок 18-б).
Такий
ітераційний процес буде збіжним при
будь-якому значенні Х(0),
якщо в системі (5.1) модуль діагональних
коефіцієнтів в кожному рівнянні буде
не меншим, ніж сума модулів побічних
коефіцієнтів цих же рівнянь:
![]() .
.
До такого вигляду можна привести будь-яку СЛАР, у якої не особлива матриця А, з допомогою законів лінійного комбінування:
-
розв’язок СЛАР не зміниться, якщо будь-яке її рівняння помножити на числову величину:
-
розв’язок СЛАР не зміниться, якщо поміняти місцями будь-які два рівняння;
-
розв’язок СЛАР не зміниться, якщо будь-яке рівняння замінити сумою (різницею) двох інших рівнянь.
Враховуючи
це, на практиці початковий вектор
невідомих для спрощення беруть в початку
координат
 .
.