

МИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра КСУ
Курсовая РАБОТА
по дисциплине «Проектирование оптимальных систем управления»
ВАРИАНТ №1
Санкт-Петербург
2018
Цель работы: Курсовой расчёт предназначен для ознакомления с процессом проектирования алгоритма управления динамическим объектом на примере водоизмещающего судна.
Как известно проектирование алгоритма управления состоит из следующих этапов:
- математическое описание объекта управления
- математическая формулировка цели управления
- выбор метода решения поставленной оптимизационной задачи
- оценка вариантов решения задачи
Исходные данные представлены в таблицах 1-2.
Таблица 1 – Вариант курсового расчета
|
Задание курсового расчета |
Параметры математической модели судна |
Косвенный метод решения задачи оптимизации |
|
1 |
1 |
Минимизация квадратичного функционала |
Таблица 2 – Характеристики судна
|
Параметр |
Обозначение |
Вариант судна |
|
Скорость хода |
|
2.57 |
|
Длина по ватерлинии |
|
99.6 |
|
Коэффициенты математической модели |
|
-0.59 |
|
|
6.16 |
|
|
|
0.8 |
|
|
|
-7.23 |
|
|
|
-0.34 |
|
|
|
-3.5 |
 ,
м/сек
,
м/сек ,
м
,
м





Описание
объекта управления: Динамика
судна, как и любого физического тела,
подчиняется второму закону Ньютона.
Силы и моменты, действующие на судно, в
свою очередь, описываются законами
гидродинамики. Соотношения между
кинематическими параметрами движения
( - угол рыскания,
- угол рыскания,
 - угловая скорость рыскания,
- угловая скорость рыскания,
 - угол дрейфа,
- угол дрейфа,
 - угол перекладки руля) показаны на
рисунке 1.
- угол перекладки руля) показаны на
рисунке 1.
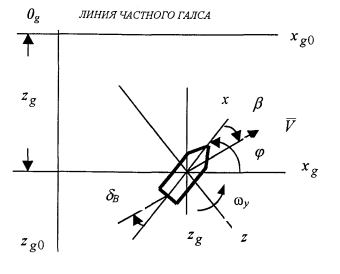
Рисунок 1 – соотношения между кинематическими параметрами движения
В
общем случае, зависимость сил и моментов,
действующих на судно от параметров
движения, носит нелинейный характер.
Однако, предположение о малых значениях
угла дрейфа и угловой скорости рыскания
и постоянстве линейной скорости движения
судна позволяют линеаризовать эти
зависимости и описать динамику в виде
системы линейных дифференциальных
уравнений относительно углов рыскания,
дрейфа, угловой скорости рыскания, угла
перекладки руля и одного нелинейного
соотношения, отражающего тот факт, что
руль не может поворачиваться на
произвольный угол при произвольном
сигнале управления. Для большинства
современных судов максимальный угол
перекладки руля равен 35°. Упомянутые
соотношения, записанные относительно
нормированного времени
 ,
имеют вид:
,
имеют вид:
|
|
|
(1) |

где:
 - относительная скорость рыскания;
- относительная скорость рыскания;
 - угол дрейфа;
- угол дрейфа;
 - угол перекладки руля.
- угол перекладки руля.
При записи системы (1), кроме предположений о малости углов не учитывалось действие на судно ветро-волновых возмущений. т.е. математическая модель (1) соответствует движению судна на тихой воде.
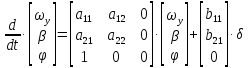
Математическая модель судна в натуральном времени записывается в виде:
|
|
|
(2) |

Соотношение между параметрами (1) и (2) имеет вид:
|
|
|
(3) |






Значение
нормирующей частоты
 .
.
Математическая модель судна с численными значениями, полученными с использованием данных таблицы 2:
|
|
|
|


В
дальнейшем x1
будет соответствовать угловой скорости
рыскания
 ,
x2
– углу дрейфа
,
x2
– углу дрейфа
 ,
а х3
– углу рыскания
,
а х3
– углу рыскания .
.
Математическая формулировка цели управления
При выполнении настоящей курсовой работы требуется спроектировать алгоритм управления рулем судна, который обеспечивает минимальное время устранения начального значения угла рыскания равного 10°.
Выбор метода решения оптимизационной задачи
В рамках настоящего курсового расчета студентам предлагается выполнить проектирование алгоритма управления тремя методами:
Прямые методы:
-
метод, основанный на теореме об N интервалах
-
метод параметрической оптимизации линейного закона управления
Косвенный метод:
-
Минимизация интегрального квадратичного функционала
Проектирование алгоритма управление методом, основанном на теореме об n интервалах.
Метод,
основанный на теореме об N интервалах
заключается в определении N-1 момента
переключения знака управляющего
воздействия и момента выключения
управления, таких, которые обеспечивают
перевод судна из начального состояния
 ,
,
 ,
,
 в конечное состояние
в конечное состояние
 ,
,
 ,
,
 к моменту времени выключения управления,
где N - порядок дифференциального
уравнения (или системы уравнений),
описывающего объект управления.
к моменту времени выключения управления,
где N - порядок дифференциального
уравнения (или системы уравнений),
описывающего объект управления.
Собственными числами матрицы А являются корни характеристического полинома:

Характеристический
полином имеет следующие корни:
 .
.
В рассматриваемом случае теорема об N интервалах применима, т.к. система уравнений, описывающих судно, имеет вещественные корни.
Задачу
определения моментов переключения и
момента выключения предлагается решать
поисковым методом, используя функцию
FMINSEARCH из пакета MATLAB или графическим
методом с использованием построения
фазовых траекторий в обратном времени.
Требуется найти такие значения параметров
 ,
,
 и
и
 ,
где
,
где
 и
и
 - моменты переключения знака управляющего
воздействия, а
- моменты переключения знака управляющего
воздействия, а
 - момент выключения управления, при
которых расстояние между изображающей
точкой, соответствующей моменту
- момент выключения управления, при
которых расстояние между изображающей
точкой, соответствующей моменту
 и требуемым конечным состоянием объекта,
было бы минимальным.
и требуемым конечным состоянием объекта,
было бы минимальным.
Файл Main1.m
global a11 a12 a21 a22 b11 b21 Um
%параметры математической модели судна
V0=2,57;
L=99.6;
r21=-0.58;
r31=6.16;
q21=0.8;
q31=-7.23;
s21=-0.34;
s31=-3.5;
% Вычисление коэффициентов
Omega=V0/L; %Нормирующая частота
a11=-r31*Omega;
a12=-q31*Omega^2;
a21=-r21;
a22=-q21*Omega;
b11=-s31*Omega^2;
b21=-s21*Omega;
p=[1 0.139 -0.00598 0];
r=roots(p); %вычисление корней характеристического полинома
Um=35*pi/180;
fi=10*pi/180;
tlp=10;
[t,x]=ode23s('odefun1',[0 tlp],[0 0 0]);
plot(x(:,1),x(:,2),'r')
hold on
global t1 t2 T
t1=26.75;
t2=55.64;
T=65.5;
[t,x]=ode23s('odefun2',[0 T],[0 0 fi]);
x(length(t),1)
x(length(t),2)
x(length(t),3)
plot(x(:,1),x(:,2),'b')
grid on
Файл odefun1.m
function f=odefun1(t,x)
global a11 a12 a21 a22 b11 b21 Um
u=-Um;
f=-[a11*x(1)+a12*x(2)+b11*u; a21*x(1)+a22*x(2)+b21*u; x(1)];
end
Файл odefun2.m
function f=odefun2(t,x)
global a11 a12 a21 a22 b11 b21 Um t1 t2 T
if t<t1
u=-Um;
elseif t<t2
u=Um;
else
u=-Um;
end
if t>T
u=0;
end
f=[a11*x(1)+a12*x(2)+b11*u; a21*x(1)+a22*x(2)+b21*u; x(1)];
end
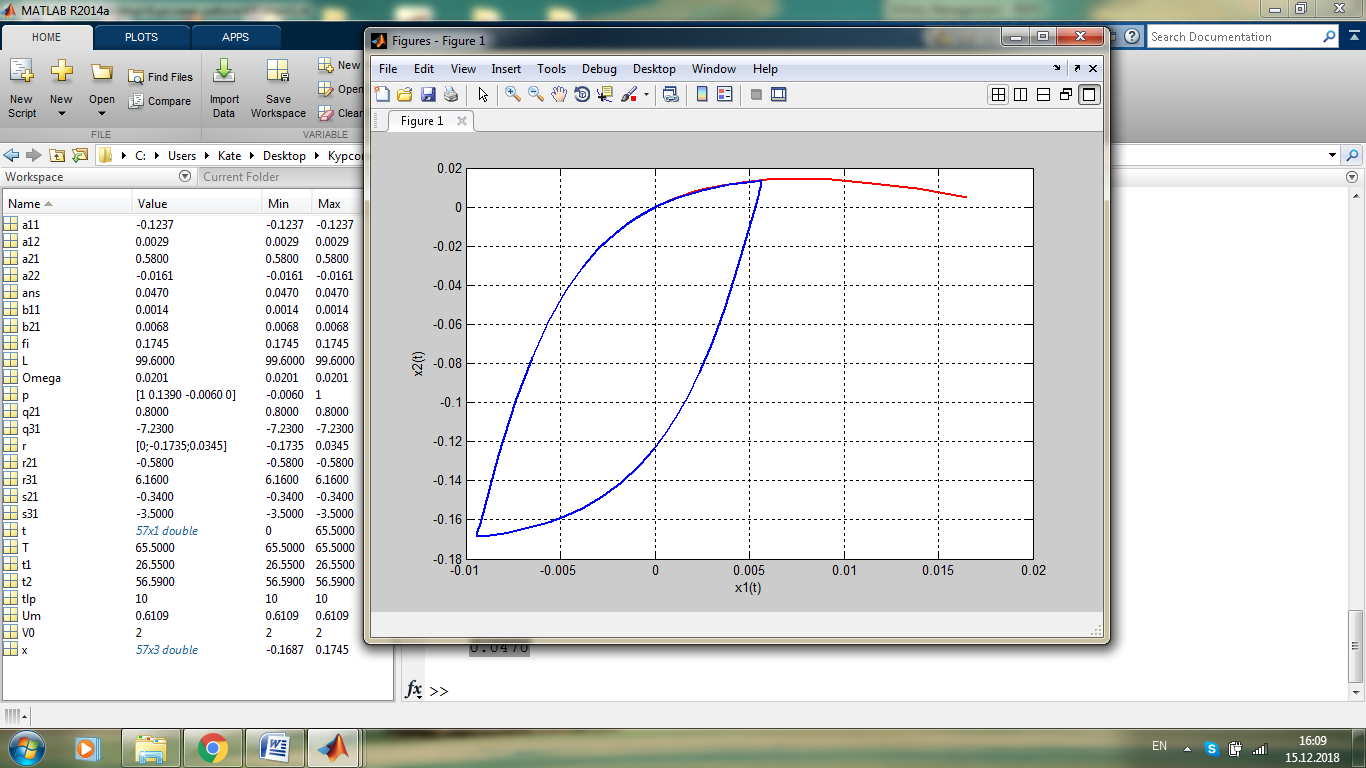
Рисунок 2 - Линии переключения x2=f(x1)
Выполненные
с помощью программы расчеты показали,
что набор промежуточных моментов
переключения
 позволяет перевести объект в точку
промежуточного финиша с координатами:
позволяет перевести объект в точку
промежуточного финиша с координатами:
x1 =
-0.0028
x2 =
-0.0197
x3 =
0.0470
Фазовая плоскость x2=f(x1) представлена на Рисунке 2.
Для определения набора параметров, позволяющих перевести объект управления в заданную точку целесообразно выполнить серию экспериментов в каждом из которых с помощью MATLAB-функции FMINSEARCH выполняется поиск таких параметров t1 t2 T, при которых минимизируется расстояние между фактическим положением изображающей точки в момент t=T и точкой промежуточного финиша [0 0 x3f]. Причем в каждом последующем эксперименте в качестве начальной точки поиска в пространстве t1t2T используется результат предыдущего эксперимента, а положение точки промежуточного финиша систематически приближается к заданной конечной точке [0 0 0].
Файл Main2.m
global a11 a12 a21 a22 b11 b21 Um fi t xf x tm
% Параметры математической модели судна
V0=2.57;
L=99.6;
r21=-0.58;
r31=6.16;
q21=0.8;
q31=-7.23;
s21=-0.34;
s31=-3.5;
% Вычисление коэффициентов
Omega=V0/L; %Нормирующая частота
a11=-r31*Omega;
a12=-q31*Omega^2;
a21=-r21;
a22=-q21*Omega;
b11=-s31*Omega^2;
b21=-s21*Omega;
Um=35*pi/180; %ограничение по углу перекладки руля
fi=10*pi/180;
global t x fi
TT=fminsearch('fmsfun1',[ 26.55 56.69 65.5])
x(length(t),1);
x(length(t),2);
x(length(t),3);
Файл fmsfun1.m
function f=fmsfun1(TT)
global tt t x fi Um
tt = TT;
[t,x]=ode23s('odefun3',[0 TT(3)],[0 0 fi]);
f = x(length(t),1)^2+x(length(t),2)^2+x(length(t),3)^2;
for i=1:length(t)
if t(i) < tt(1)
u=-Um;
elseif t(i) < tt(2)
u=Um;
elseif t(i) > tt(2)
u=-Um;
end
if t(i) > tt(3)
u=0;
end
uu(i,1) = u;
end
plot(t, x(:,1),t, x(:,2),t, x(:,3),t, uu(:,1))
legend('x1(t)-уголовая скорость рыскания','x2(t)-угол дрейфа','x3(t)-угол рыскания','u(t)-управляющее воздействие')
grid on;
end
Файл odefun3.m
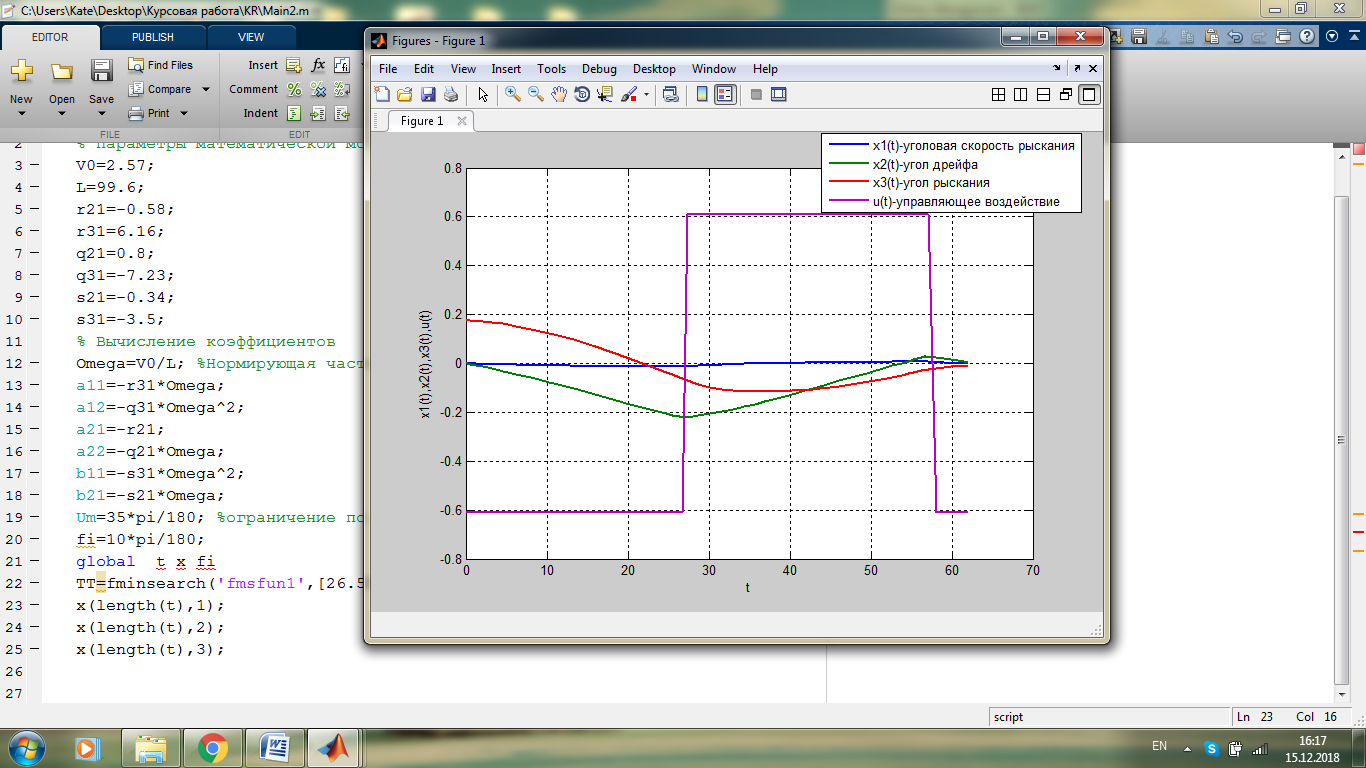
Рисунок 3 - Фазовые траектории объекта управления
В
ходе выполнения данной программы были
получены точные моменты переключения
времени
