

№1.Принципы управления и регулирования, классификация АС. Принцип рег-я по отклонению. Хупр выраб-ся на основе измерения Хвых. Принцип рег-я по возмущения. Хупр выраб-ся на основе измерения Хвх. Этот принцип прим-ся редко и только в том случае, когда по каким-либо причинам невозможно измерить Хвых.
Клас-ция
САУ осущ. по осн. признакам.
Первый
признак
– принцип регулирования, на осн. которого
построена САУ. Сист. с регулированием
по отклонению и с регулированием по
возмущению. Если сист. рег-я осуществляет
контроль за отклонением рег-мой величины
от заданной, то значит, рег-ие осуществляется
по
отклонению.
Если контролируется величина внешнего
воздействия – то рег-ие по
возмущению.
Второй
признак
– наличие в системах явно выраженной
цепи главной обратной связи. Разомкнутые
и замкнутые.
Сист., работающие по разомкнутому
циклу, используют только в качестве
составной части более сложных систем
автом. регулирования. Под главной
обратной связью ГОС понимается подача
части энергии с выхода системы на её
вход. ГОС служит для сравнения
действительного закона изменения
регулируемого параметра с требуемым.
Помимо ГОС в системе имеются различные
местные обратные связи, предназначенные
для улучшения динамических свойств
системы. Местная обратная связь
охватывает один или несколько элементов
основной цепи. Обратную связь называют
положительной, если её выходной сигнал
суммируется с основным сигналом, и
отрицательной, если этот сигнал
вычитается из основного сигнала.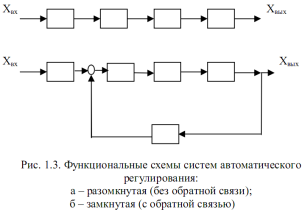
Третий признак – закон изменения регулируемой величины в них. Сист. стабилизации, программного регулирования и следящие. Сист. стабилизации предназначены для поддержания постоянного значения рег-ой величины. В этих системах задающее воздействие не изменяется во времени. Сист. программного регулирования предназначены для изменения рег-ой величины по известному закону в функции времени или какой-либо другой величины. Задающее воздействие называют программой рег-ия. Следящие системы предназначены для изменения рег-ой величины по заранее известному закону. Задающее воздействие представляет собой случайную функцию времени. Четвертый признак – способность сист- автом. рег-ия поддерживать с определенной степенью точности значения рег-ой величины. Статические и астатические. Статической системой автоматического регулирования называют такую сист., в которой принципиально невозможно поддерживать постоянное значение рег-мого параметра при условии, что задающее воздействие системы остается неизменным. Остаточную ошибку в такой системе называют статизмом. Астатической системой автом. рег-ия называют такую сист., в которой в установившемся режиме рег-ый параметр принимает всегда одно и тоже значение и не зависит от величины возмущающего воздействия на объект рег-ия. Статизм в астатической системе всегда равен нулю. Пятый признак – функциональная связь между входными и выходными величинами элементов, входящих в состав сист. автом. рег-ия. Непрерывные и дискретные. Непрерывной сист. автом. рег-ия называют сист., в которой непрерывному изменению входных величин элементов соответствует непрерывное изменение выходных величин элементов. Дискретной сист. автом. рег-ия называют систему, в которой непрерывному изменению входной величины хотя бы одного элемента, входящего в состав системы, соответствует дискретное изменение выходной величины этого элемента.
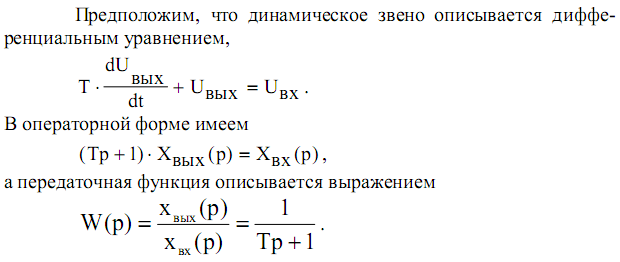
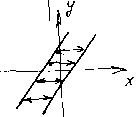
2.Матем.модели СУ (функц. схемы САУ, уравнения динамики, приведение их к форме в отклонениях и обезразмеривание). Динамика АС хар-ет поведение систем в переходе из одного равновесного состояния в другое. Динамика описывается ур-ми динамики – диф. ур-ми, где в кач. основы берется производная по времени. Ур-я динамики позволяют исследовать хар-ки САУ, но для сложных сист.их трудно составить. Для того, чтобы не упустить какие-нибудь процессы, их изображают в виде функциональной схемы, где
 -
процесс,
-
процесс,
→ - взаимодействие процесса,
- узел (размножение),

![]()


 -
сумматор (складывает сигналы)
-
сумматор (складывает сигналы)
Функц. схема показывает связь и взаимодействие пр-сов САУ.
Любую переменную можно представить в виде у=у0±Δу, где у0 – некая константа, обычно наиболее характерная для данного устройства, которая наз-ся нулевые начальные условия, Δу – небольшие отклонения переменного параметра от у0.
Переход к записи ур-я в отклонениях позволяет провести его линеаризацию – замену нелинейной функции линейной. Линеаризация справедлива в области у0±Δу. Линеаризация осущ-ся на осн. разложения ф-ции в ряд Тэйлора и применении только первого слагаемого в этом ряду. Получаем: у=у0+Δу=f(x0)+f’(x0)*Δx .
Т.е. Δу= f’(x0)*Δx – ур-е динамики в отклонениях. Это ур-е уже линеаризовано, т.к. Δу и Δx имеют 1ую степень. Производная – это не степень, поэтому линеар-ция формально сводится к простановке значка Δ около переменного параметра. Приведение ур-я в отклонениях существенно упрощает ур-е динамики. Для еще большего упрощения его записывают в безразмерном виде. При этом ур-е теряет физ. смысл, и поэтому с ним можно работать как с матем. ур-ем. Обезразмеривание произв-ся путем отнесения переменной размерной величины к постоянной величине такой же размерности. Обычно за эту константу принимаются нулевые начальные условия. Для того, чтобы еще упростить ур-е дин. переходят от диф. ур-я к алгебраическому на осн. преобразования Лапласа, которые формально сводятся к замене знака производной на оператор Лапласа p: d/dt=>p , d2/dt2=>p2 и т.п. Если ур-е дин. в операторной форме записать ч\з отношение Xвых\Xвх, то перейдем к понятию передаточной ф-ции W(p)=X(p)вых\X(p)вх= ΔX(p)вых\ΔX(p)вх.
№3.Передаточные
функции СУ (определение перед. ф-ций
звеньев САУ, свертка структурных схем).
Если ур-е дин. в операторной форме
записать ч\з отношение Xвых\Xвх,
то перейдем к понятию передаточной
ф-ции W(p)=X(p)вых\X(p)вх=
ΔX(p)вых\ΔX(p)вх.
Передаточная
функция –
это отношение выходной переменной в
операторной форме ко входной переменной
в операторной форме при нулевых начальных
условиях.
Передаточная ф-я САУ состоит из множества типовых звеньев, которые графически предст. в виде структурной схемы – та же функциональная схема, но выраженная ч\з передаточные ф-ции W(p). Соотв. в структ. схеме Хвх и Хвых не имеют размерности. Для исследования устойчивости и качества САУ в перв. очередь необходима ее передаточная ф-я Wобщ(p), которая произв-ся на осн. правил преобразования: 1. Последовательное соединение звеньев Wобщ = W1*W2*…*Wn. 2. Параллельное соединение Wобщ = W1+W2+…+Wn. 3. Встречно-параллельное соединение W1→Wпрям , W2→W обр , Wобщ = Wпр / (1±Wпр*Wобр) . Отрицательная обратная связь ослабляет сигнал, циркулирующий в контуре. Положительная – усиливает (нужен внешний источник энергии). Кроме приведенных правил преобразования структ. сх. сущ-ют правила переноса узлов и сумматоров. Главное из них – при переносе при неизменных входных сигналов Хвых должно остаться постоянным.
№4. Им.автомат.сист.(клас., передат. ф-ии, уст-ть и качество)
Особ-ть этих сист. – сигнал от датчиков поступает к сист. Не постоянно, а переодически.т.е. сист. Контр-ет хвх или хвых только в моменты съема. Два метода съема: 1.по времени: съем сигнала осущ.ч/з опред.промежутки времени. 2. По уровню: при достижении его опред.знач. в более слож. Сист. Прим. Комбинация этих методов – дискретизация. Классификация: 1. С амплитудно-импульсной модуляцией (инф-ия о вх.сигнале шифруется в величине амплитуды вых.сигнала).
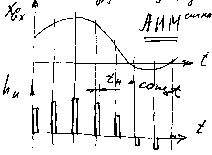
2. С широтно-импульсной модуляцией.

В нек. случаях прим.комбинация этих методов, при этом фиксир.только знак сигнала, а не его амплитуда. Передат.ф-ии. Обычно в им.сист. только один им.эл-т, распол.в начале САУ.ост. эл-ты явл. линейными. на практике им.эл-т никогда не создает идеальный импульс. соотв-но теория им.сист. непригодна для реального им.эл-та.поэтому он условно разб-ся на 2 эл-та, один из кот.форм-ет импульс, а др.деформирует его под реальный. эти эл-ты м.б.свернуты в один. Им.эл-т в структ-ой сх.не переставляется. Для им.сист.разраб-ся соответств-ая теория, но в том сл., когда Т стрем-ся к 0,а лин.часть инерционна,им.сист.практ.превр-ся в линейную. Поэтому им.сист. имеют хор.кач-во когда Т сущ-но меньше пост-ой времени лин.части.
5. Общие сведения о нелинейных сау и особенности их работы
Абсол.лин.сист.нет. если нелин-ти малы,их отбрасывают и предст. сист. в виде лин.нелин-ти бывают динам-ие и статич-ие. динам-ие опред.нелин-ть,проявл-ую себя во времени.н-р,скорость под-го камня. статич-ие проявл.себя вне пар-ра времени. В класс.теории нелин.сист.рассм.только статич-ие нелин-ти. Характерные статич-ие нелин-ти.
1. Зоны нечувств-ти.
2. С насыщением
3. С огранич-ем
4. Зона нечувст-ти с огран-ем
5. С петлей гистерезиса-люфта
6. С релейной хар-кой
![]()
![]()
![]()
![]()
Для того, чтобы пар-ры рел.хар-ки не оказ.влияния на методику расч. Рел.сист.принято начало корд. переносить в центр хар-ки.эта хар-ка наз. Идеальная двухпозиц-ая. Виды: двухпоз-ая с зоной неоднознач-ти, трехпозиц-ая с зоной нечувств-ти, трехпозиц-ая с зоной нечувств-ти и неоднозн-тью
![]()
![]()
![]()
№6. Гармонические коэффициенты усиления нелинейных звеньев
Сист.явл.нелин.,
если в ней им-ся одно нелин.звено.но в
САУ большое кол-во звеньев явл.лин.они
оказ. Большое влияние на общ.динамику
сист.в 1ю очередь оно проявл.ч/з
инерционность звеньев. Для того, чтобы
говорить об уст-ти рел.САУ надо понимать,
что налич.в ней колебаний ее естеств.сост.
соотв-но для рел.систусл-е уст-ти сводится
к треб.не превышения доп. амплитуды и
частоты. при превыш. амплитуды сист.будет
иметь точ-ть ниже требуемой. При
преваш.частоты возн.перегрузки. в связи
с инерц-тью лин.части прямоуг.колебания
превр-ся в гармонические. В ТАУ предложен
метод прим-я лин. теории к нелин.сист.
– метод гармонич.линеоризации. вых.возд-е
м.б.предст.в виде набора синусоид,разлож.в
ряд Фурье
 Гарм.колеб.с
амплитудой А1,
А3..
наз-ся гармониками. Экспериментально
док., что ч/з лин.часть проходит только
колеб. А1.
Остальные гасятся сист. из-за ее
инерционности и спос-ти легко переходить
в др.виды энергии. При гарм.линеор.за
основу прим.усл-е
Гарм.колеб.с
амплитудой А1,
А3..
наз-ся гармониками. Экспериментально
док., что ч/з лин.часть проходит только
колеб. А1.
Остальные гасятся сист. из-за ее
инерционности и спос-ти легко переходить
в др.виды энергии. При гарм.линеор.за
основу прим.усл-е
 для однознач.сист. для реальных
для однознач.сист. для реальных
 вх.колеб.опис-ся
вх.колеб.опис-ся
 если это ур-е дифф-ть и подст.в пред.,получим
для идеального реле
если это ур-е дифф-ть и подст.в пред.,получим
для идеального реле
 , для реального
, для реального
 т.е. получ.лин.ур-я, связ.вход и выход
рел.звена.т.к. в ур-и присутствует t,то
это ур-е динамики. Однозн.рел.хар-ка
зам-ся на лин.хар-ку пропорц-го звена.
Для неоднозн.звена имеем хар-ку лин.звена
с введением производной
т.е. получ.лин.ур-я, связ.вход и выход
рел.звена.т.к. в ур-и присутствует t,то
это ур-е динамики. Однозн.рел.хар-ка
зам-ся на лин.хар-ку пропорц-го звена.
Для неоднозн.звена имеем хар-ку лин.звена
с введением производной
№28.Характеристики САУ промышл-ми роботами. САУ ПР во многом зависят от принятой системы координат. В прямоуг. декартовой сист. коорд. програм-ние не отличается от ЧПУ станками. Такая сист. примен. для управления роботами, обслуживающими группу ст-в, устан-х по потоку. Конструктивно эти роботы уст-ны на траверсе, проходящем над ст-ми. Цилиндрич. сист. коорд. Прим. для роб-в, обслуж. группу ст-в, располож-ых по гнездовому принципу. Сферическая сист. Прим. для роботов со сложной траекторией перемещения манипуляторов (нпр, для окрасочных роб-в). Клас-ция САУ ПР осущ. по признакам: 1) Тип траектории движения робота: а) дискретная тр-я движ-я. Фиксирование положения руки робота осущ-ся в оч. огранич-м кол-ве точек, обычно это начальные и конечные точки по координате движ-я. Позиционирование в этих точках обычно осущ-ся по жестким упорам. Тр-я движ-я руки м\у точками неопределенна. Гл. недостаток - неполная достижимость точек рабочей зоны робота. Этот тип тр-ии прим. в осн. в цикловых САУ. б) квазинепрерывная (псевдо) тр-я. Кроме конечных точек программ-ся и промежуточные точки. Этих промеж-х точек м.б. десятки и даже тысячи штук. Такой тип тр-ии прим. в позиционных САУ. в) непрерывная тр-я. Прим. в сложных контурных, адаптивных и интеллект-х САУ. Кол-во точек позиционир-я не ограничено. 2) Цикл управления. Хар-ся в осн. организацией обратной связи м\у командой на перемещение и командой ее исполнения. а) разомкнутые. Проверки команды исполнения нет. Прим. в осн. в цикловых САУ. б) замкнут по точкам позиц-ния и разомкнут м\у ними.
Прим. в позиц-х САУ. в) замкнут по внутр. контуру состояния руки робота. Прим. в контурных САУ. г) замкнутый по внутр. контуру и по наружному контуру инф-ции о состоянии среды. Прим. в адаптивных САУ. д) Замкнутый по внутр. и внешн. знаниям. Осущ. непрерывный контроль состояния ПР. В этом случае обратная связь обеспеч-ся на основе знаний о цели работы ПР и наложенных не него ограничениях. 3) Источники инф-ции для синтеза. а) нет источника инф-ции (цикловые САУ). б) имеются датчики положения. в) к датчикам положения добавл. датчики внешней среды. г) имеется система очувствления ПР, включ. в себя датчики разного физич. принципа. 4) Алгоритм управления. а) логическая последовательность срабатываемых звеньев (программир-ый контроллер). б) к Пр.Контр. добавл. интерполятор. в) к перечисленному добавл. ЭВМ по расчету диф. уравнений, позволяющих прогр-ть не только траекторию, но также скорость и ускорение. 5) Способ прогр-ния. а) настройка мех. упоров. б) прогр-ние с примен. языков машинных кодов. в) прогр-ние с прим. автом. способов - самопрогр-ние.
№27 Классификация систем управления промышленными роботами
Осуществ. по след. принципам:
Тип траектории движения робота;
Цикл управления;
Источник инф. для синтеза закона управления;
Алгоритм управления;
Способ программирования.
Тип траектории движ. робота. Дискретное движение хар-ся - фиксированием руки робота осущ. В очень ограниченном кол-ве точек, обычно это начальные и конечные точки по коорд. движения. Позиционирование осуществ. по жестким упорам. Траектория движения руки между точками неопределима. Недостаток: неполная достижимость точек рабочей зоны. Этот тип траектории примен. в цикловых САУ.
Квазинепрерывная траектория хар-ся тем что кроме конечных точек программируются и промежут. точки (10-1000шт.). Такой тип траектории примен. в позиционных САУ.
Непрерывный тип траектории примен. в сложных контурных, адаптивных и интеллектуальных САУ. Кол-во точек позиционирования не ограничено.
Цикл управления.
Разомкнутые характеризуются наличием одного потока информации, поступающего со считывающего устройства к исполнительному органу станка. В разомкнутой системе нет датчика обратной связи, и поэтому отсутствует информация о действительном положении исполнительных органов станка.
Замкнутые характеризуются двумя потоками информации: от считывающего устройства и от датчика обратной связи по пути. В этих системах рассогласование между заданными и действительными перемещениями исполнительных органов устраняется благодаря наличию обратной связи.
Адаптивные характеризуются тремя потоками информации: от считывающего устройства; от датчика обратной связи по пути; от датчиков, установленных на станке и контролирующих процесс обработки по таким параметрам, как износ режущего инструмента, изменение сил резания и трения, колебания припуска и твердости материала заготовки и др. Такие системы позволяют корректировать программу обработки с учетом реальных условий резания.
Замкнутые по точкам позиционир. и разокнутые между ними. Эти сист. примен. в позиционных САУ.
Цикл управления замкнут по внутр. контуру сост. руки робота. Эта система примен. в контурных САУ.
Цикл замкнутый по внутр. контуру и по наружн. контуру инф. о сост. среды. Примен. в адаптивных системах.
Цикл управления замкнутый по внутр. и внеш. знаниям. В данном случ. осуществ. непрерыв. контроль на основе знаний о целее работы пром. робота и положенных на него ограничений.
Источники информации.
Нет источников информации
Имеются датчики положения
Датчик положения+внешней среды
Имеются системы очувствления пром. роботов включ. в себя датчики разного физич. принципа.
Алгоритм управления.
Логич. послед. срабат. звеньев.
К 1 + интерполятор.
2 + ЭВМ по расчету диф. урав-ний, позволяющих программировать не только траекторию, но и v и a.
Способ программирования.
Настройка механ. упоров.
Программир. с примен. языка машинных кодов.
Программир. с примен. автоматич. способов.
№26 Конструктивные особен-сти станков с ЧПУ
Станки с ЧПУ должны обеспечивать высокие точность и скорость отработки перемещений, заданных управляющей программой, а также сохранять эту точность в заданных пределах при длительной эксплуатации. Конструкция станков с ЧПУ должна, как правило, обеспечивать совмещение различных видов обработки, автоматизацию загрузки и выгрузки деталей, автоматическое и дистанционное управление сменой инструмента, возможность встраивания в общую автоматизированную систему управления. ЧПУ определяются особенностью их работы. Т.К. в этих станках управление осуществляется автоматически, то принимаются все меры, что бы уменьшить погрешноность управления. В конструкциях станков с ЧПУ используют короткие кинематические цепи, что повышает статическую и динамическую жесткость станков. Для всех исполнительных органов применяют автономные приводы с минимально возможным числом механических передач. Эти приводы должны иметь высокое быстродействие. Для уменьшения влияния трения на погрешность обработки оно сводится к минимуму (применяются направляющие качения). Для повышения жёсткости станки выполняются с минимальными вылетами.
№25 Система управления с ЧПУ (сост,клас,особ)
Система ЧПУ- это совокупность специализированных устройств, методов и средств, необходимых для реализации ЧПУ станком. Устройство ЧПУ (УЧПУ)-часть системы ЧПУ, предназначенная для выдачи управляющих воздействий исполнительным органом станка в соответствии с управляющей программой (УП)(Цена импульса или дискретность характеризует величину перемещения рабочего органа станка на один импульс). Структурная схема системы ЧПУ представлена на рис. 1. Системы ЧПУ классифицируют по следующим признакам: а)по уровню технических возможностей;б)по технологическому назначению; в)по числу потоков информации (незамкнутые, замкнутые, адаптивные); г)по принципу задания программы (в декодированном виде, в кодированном виде, т.е. в абсолютных координатах или в приращениях, от ЭВМ); д)по типу привода (ступенчатый, регулируемый, следящий, дискретный); е)по числу одновременно управляемых координат. а)По уровню технических возможностей международной классификации системы ЧПУ делят на следующие классы:
NC–системы с покадровым чтением перфоленты на протяжении цикла обработки каждой заготовки;
SNC–системы с однократным чтением всей перфоленты перед обработкой партии одинаковых заготовок;
CNC — системы со встроенной малой ЭВМ (компьютером, микропроцессором);
D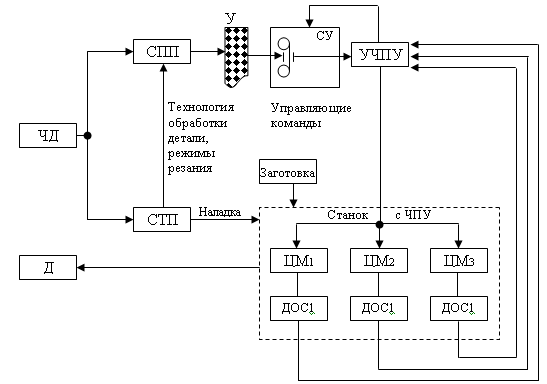 NC
— системы прямого числового управления
группами станков от одной ЭВМ;
NC
— системы прямого числового управления
группами станков от одной ЭВМ;
HNC — оперативные системы с ручным набором программы на пульте управления.
б) По технологическому назначению системы ЧПУ подразделяют на четыре вида: 1)позиционные; 2) обеспечивающие прямоугольное формообразование; 3) обеспечивающие прямолинейное 4) формообразование; обеспечивающие криволинейное формообразование.1) Позиционные, обеспечивают высокоточное перемещение (координатную установку) исполнительного органа станка в заданную программой позицию за минимальное время. Позиционными системами ЧПУ оснащают сверлильные и координатно-расточные станки.2) Прямоугольное формообразование, позволяют управлять перемещениями исполнительных органов станка в процессе обработки. В процессе формообразования исполнительный орган станка перемещается по координатным осям поочередно, поэтому траектория инструмента имеет ступенчатый вид, а каждый элемент этой траектории параллелен координатным осям. Указанными системами оснащают токарные, фрезерные, расточные станки.3) Прямолинейное формообразование, реализуют движение инструмента при резании одновременно по двум координатным осям. В данных системах используют двухкоординатный интерполятор, выдающий управляющий импульс сразу на два привода подач.Указанные системы обладают большими технологическими возможностями, их применяют для оснащения токарных, фрезерных, расточных и других станков.4) ЧПУ Обеспечивающие криволинейное формообразование, позволяют управлять обработкой плоских и объемных деталей, содержащих участки со сложными криволинейными контурами.Контурные системы ЧПУ имеют, как правило, дискретный привод.
Многоцелевые(сверлильно-фрезерно-расточные) станки.
в) По числу потоков информации системы ЧПУ делят на 1) разомкнутые, 2) замкнутые 3) адаптивные.1) Разомкнутые системы характеризуются наличием одного потока информации, поступающего со считывающего устройства к исполнительному органу станка.В разомкнутой системе нет датчика обратной связи, и поэтому отсутствует информация о действительном положении исполнительных органов станка. 2) Замкнутые системы ЧПУ характеризуются двумя потоками информации: от считывающего устройства и от датчика обратной связи по пути. В этих системах рассогласование между заданными и действительными перемещениями исполнительных органов устраняется благодаря наличию обратной связи. 3) Адаптивные системы ЧПУ характеризуются тремя потоками. информации: от считывающего устройства; от датчика обратной связи по пути; от датчиков, установленных на станке и контролирующих процесс обработки(износ, температура, припуск).г) Принципу задания программы: От ноля (станка или детали), В относительных перемещениях. е)по числу координат: Одно и многокоординатные.
№24 Технологич. и терминальная задачи управления
Технологическая задача: Поддержание процессов резанья. Для оценки изменения параметров резанья необ. ввести техинструкции: Представляют собой команды управления ,которые реализуются механизмами станка. Действия по разработке управ. программ: 1.Разработка маршрута обработки детали, 2. Разработка техпроцесса, 3. Разработка управляющей программы. Для эффективности раб. ЧПУ применяют типовые циклы, хранящ. В памяти ЧПУ. УЧПУ–корректировка режимов резанья в зависимости от условий обработки. Терминальная задача: организует диалоговый интерфейсы между оператором и числовым управлением – это обеспечивается через пульты управления. По мере развития УЧПУ состав и внешний вид пультов нормализуется. Все пульты управления строятся по единой системе – в них имеются зоны управления и зоны индексации. Две группы символов: 1) симв. Направления и характера движения. 2) Команды
№23 Программируемые контроллеры.
С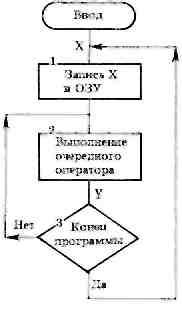 пециализированные
УВМ, предназначенные дня управления
сложными станками, автоматическими
линиями (АЛ), получили название
программируемые контроллеры (ПК).
Понятие "программируемый" отражает
возможность ПК воспринимать программу
на языке высокого уровня, а понятие
"контроллер" - способность выполнять
функции управления сложными
технологическими процессами. Работа
ПК, основывается на последовательном
сканировании программного управления
и выполнение текущей команды. Алгоритм
функционирования ПК: Инструкции вводится
посредством клавиатуры программной
панели и делятся на шифрованные и
кодированные. Шифрованные инструкции
вводятся с помощью одной клавиши,
имеющей мнемоническое обозначение
(шифр) в соответствующей инструкции.
Кодированные инструкции вводятся с
помощью нескольких клавиш. В большинстве
современных ПК предусмотрено три
способа задания программы: 1) а релейных
символах; 2) при помощи логических
(булевых) выражений; 3) на языке
символического кодирования.
пециализированные
УВМ, предназначенные дня управления
сложными станками, автоматическими
линиями (АЛ), получили название
программируемые контроллеры (ПК).
Понятие "программируемый" отражает
возможность ПК воспринимать программу
на языке высокого уровня, а понятие
"контроллер" - способность выполнять
функции управления сложными
технологическими процессами. Работа
ПК, основывается на последовательном
сканировании программного управления
и выполнение текущей команды. Алгоритм
функционирования ПК: Инструкции вводится
посредством клавиатуры программной
панели и делятся на шифрованные и
кодированные. Шифрованные инструкции
вводятся с помощью одной клавиши,
имеющей мнемоническое обозначение
(шифр) в соответствующей инструкции.
Кодированные инструкции вводятся с
помощью нескольких клавиш. В большинстве
современных ПК предусмотрено три
способа задания программы: 1) а релейных
символах; 2) при помощи логических
(булевых) выражений; 3) на языке
символического кодирования.
№20 Геометрическая задача управления,. Основная задача управления т.к. она отвечает за формообразование, т.е. за управлением следящими приводами. Детали, обрабатываемые на станках с ЧПУ, можно рассматривать как геометрические объекты. При обработке детали инструмент и заготовка перемещаются относительно друг друга по определенной траектории. Программир. контроллеры раб. по простой жесткой программе по которой преусмотренно считывание кадров, проверка сост. команд и контроль сост. оборуд.
Типовой алгоритм:
Считыв. кадра с программоносит. (запоминание)
Выполн. кадра программы.
Проверка исполнения
Проверка наличия след. кадра
Счит. и запись в ОЗУ
Програм. работы ПК офрмляется в виде программных инструкций описывающих коды операций (что делать?) и адреса операндов (с чем делать?). Возможны разные способы задания программных инструкций: 1 в рылейных символах (с помощью спец .рылейно-контрольной схемы);
2 с помощью логических выражений; 3 на языке символьного кодирования.
№21 Интерполяция и интерполяторы
ИНТЕРПОЛЯЦИЯ (от лат. Interpolatio- изменение, переделка, в математике и статистике — отыскание промежуточных значений величины по некоторым известным ее значениям. Напр., отыскание значений функции f( x) в точках x, лежащих между точками xo по известным значениям yi = f( xi) (где i = 0,1,..., n). При программировании введение дополнительных опорных точек приводит к резкому увеличению расчетов и объема программы. Поэтому в практике детальное представление заданной траектории движения инструмента между двумя опорными точками (с выдачей команд на соответствующие перемещения по осям) осуществляется с помощью специального вычислительного устройства — элемента УЧПУ — интерполятора. Работа интерполятора, как вычислительной машины основана на решении определенных задач. Известно несколько методов интерполяции, среди которых наиболее распространен метод оценочной функции, основанный на решении алгебраических уравнений . Различают линейную интерполяцию и круговую, и соответствующие им интерполяторы. Современные станки с ЧПУ, как правило, имеют линейно-круговые интерполяторы, решающие задачи как линейной, так и круговой Интерполяции, а в ряде случаев и задачи интерполяции кривых второго порядка.
№ Автоматизированные системы управления
Производственный процесс может быть неприрывистыми так и прерывистыми. Он так же делиться на ряд задач( Изготовление изделий, Управление оборудованием итд). Все эти задачи объед. в сверхзадачу – автоматизация управления в целом. Эта зад. полностью не решена и рассматривать стоит отдельные аспекты. К таким аспектам относится АСУ – это система (человек-машина) призвана обеспечить автоматиз-й сбор и обработку информации, необходимый для организации процесса управления. Признаки АСУ: Наличие больших потоков информации, сложные алгоритмы. АСУ имеет следующ. св-ва: 1) Наличие большого числа взаимодействующих и взаимосвяз.обьектов.2)Многофункциональность3)Цель, направленность. В зависимости от роли делятся: 1) Информационные АСУ 2) Управляющие АСУ. Классифицируются на 1) Децентрализованная 2) Централизованная 3) Иерархическая.
№19 Электрические и Гидравлические исполнитель- ные элементы САУ. Обычно находятся в конце структурной схемы САУ. От них требуют: Большая мощность, Надёжность, высокое КПД, желательно большое быстродействие; линейность статических характеристик; плавность регулированная скорости перемещения в широких диапазонах; малая масса, габаритные размеры, стоимость; удобство в эксплуатации. Используются: электродвигатели, гидродвигатели, Моторы (магнитострикционные, с перехватом, гидромоторы). Среди электрических исполнительных устройств широкое распространение получили электромагниты, электродвигатели постоянного и переменного тока, шаговые двигатели и электромагнитные муфты.
Двигатели постоянного тока:
![]() К
недостатком управления электродвигателем
со стороны обмотки возбуждения относятся
малый диапазон изменение скорости,
нелинейность статических характеристик,
увеличение порядка уравнения движения
электродвигателя.
К
недостатком управления электродвигателем
со стороны обмотки возбуждения относятся
малый диапазон изменение скорости,
нелинейность статических характеристик,
увеличение порядка уравнения движения
электродвигателя.
Рис.1. Двигатели с эл. магнитным возбуждением.
В системах автоматического управления более широкое распространение получил способ управления двигателем со стороны якоря, так как он позволяет получить широкий диапазон регулирования скорости, плавность регулирования, относительную линейность статических характеристик, большое быстродействие. Одним из существенных недостатков исполнительных двигателей постоянного тока является наличие скользящего контакта между щетками и коллектором, создающего искрение и радиопомехи. Надежность двигателей относительно низка из-за быстрого износа щеток, особенно при высоких скоростях вращения якоря.
Асинхронные двигатели:
В САУ широкое распространение получили
в качестве исполнительных устройств
двухфазные асинхронные двигатели с
короткозамкнутым или тонкостенным
полым ротором. Рис. 2. Двухфазные
асинхронные двигатели. Ротор вращается
в ту же сторону, что и магнитное поле,
но с меньшей угловой скоростью. Разность
между угловыми скоростями магнитного
поля и ротора характеризуется скольжением.
Гидродвигатели:
Нашли широкое применение. Обладают –
Высокой удельной мощностью, но требуют
специсточник энергии(гидростанцию).Бывают
вращательного и поступательного
движения: Гидроморы и гидроцилиндры.
Гидроморы основаны на принципе работы
гидроцилиндра. Таких цилиндров в моторе
несколько и включаются в работу они
последовательно. Между гидромотором
и гидроцилиндром промежуточное положение
занимает лопастные гидромоторы. Такие
гидромоторы применяются для небольших
угловых перемещений ( зажим заготовки,
поворот рулей).
САУ широкое распространение получили
в качестве исполнительных устройств
двухфазные асинхронные двигатели с
короткозамкнутым или тонкостенным
полым ротором. Рис. 2. Двухфазные
асинхронные двигатели. Ротор вращается
в ту же сторону, что и магнитное поле,
но с меньшей угловой скоростью. Разность
между угловыми скоростями магнитного
поля и ротора характеризуется скольжением.
Гидродвигатели:
Нашли широкое применение. Обладают –
Высокой удельной мощностью, но требуют
специсточник энергии(гидростанцию).Бывают
вращательного и поступательного
движения: Гидроморы и гидроцилиндры.
Гидроморы основаны на принципе работы
гидроцилиндра. Таких цилиндров в моторе
несколько и включаются в работу они
последовательно. Между гидромотором
и гидроцилиндром промежуточное положение
занимает лопастные гидромоторы. Такие
гидромоторы применяются для небольших
угловых перемещений ( зажим заготовки,
поворот рулей).
№17 Электромеханические уселит.
основными элементами электромеханических усилителей являются электромагнитные устройства с подвижными частями: электромагнитные реле, вибропреобразователи, магнитоэлектрические реле, электродинамические реле. Наиболее широкое распространение получили электромагнитные реле, которые в зависимости от типа электромагнита можно подразделить на следующие виды: нейтральные реле постоянного или переменного токов и поляризованные реле. Нейтральные реле представляют собой нереверсивные элементы автоматики, поскольку не реагируют на изменение полярности или фазы входного управляющего сигнала. Электромагнитные реле состоят из контактной системы и электромагнита. По характеру работы различают следующие виды контактов: 1)замыкающие – разомкнутые при отсутствии тока в обмотке электромагнита (рис.1,а); 2)размыкающие – замкнутые при отсутствии тока в обмотке (рис.1,б); 3) переключающие– представляющие собой совмещенный узел из замыкающих и размыкающих контактов (рис.1,в). Рис. 1. Виды контактов реле



а) б) в)