

33. Эффективность автом-ии
Автомат-ия явл.осн.направлением повыш.эффект-ти пр-ва, но безоглядная автом-ия может нанасти экон.ущерб.связ.это с тем, что практич.всегда автом-ия сопряж.с увел.стоимости оборуд-ия.соотв-но эконом.эффект м.б. получен только в том сл.,если сниж-е стоимости раб.силы и повыш-е производ-ти превысят расходы на оборуд-е. соотв-но прежде чем приступать к автом-ии необх.провести расчет ее экон.эффективности. осн.пар-ром явл.привед.затраты на одно изделие З=С+ЕнКр, где С-себест-ть, Кр-уд.капитальные вложения, Ен-норм.коэф.эффективности. для того, чтобы опред.имеется ли экон.эффект от автом-ии необх.сравнить уд.затраты до и после автом-ии. экон.эффект от автом-ии Э=(З1-З2)А посла подстановки первой ф-лы во вторую, опред.экон.эффект. при автом-ии обычно осущ.смена оборуд. поэтому в кап.затраты необх.вкл.расходы на демонтаж и монтаж обор-ия. Немалую часть себ-ти сост.ЗП, причем сущ-ет тенденция повышения этой составляющей. При расчетах затрат необх.учит.затраты на ремонт и обсл.обор-ия.предварит. их можно принять 4,5% от стоимости оборуд-ия. В нормативах учит.вид ремонта,его трудоемкость и часовая ТС ремонтников. При расчете затрат на ремонт расч.произв-ть с учетом фонда р-ты оборуд-я, кот.прин. 1840 часов
№22 Логическая задача управления. В процессе работы САУ возникает режим работы постоянность их работы и взаимосвязь. При этом необходимо обеспечить управление одними механизмами с учётом работы других. В основе теоретической базы логической задачи – лежит алгебрологика, которая заключается в том ,что Элементы-знаки связывают сигналы в логические связки. А результат логических операций описывается с помощью таблиц истинности.
Обозначения |
Название логич операц. |
Как читается |
Набор истенных значений |
A1 A2 |
логическое умнож |
A1 и A2 |
0001 |
A1 A2 |
логическое слож |
A1или A2 |
0111 |
A1 ~ A2 |
тождественность |
A1тогда, когда A2 |
1001 |
Логическая задача заним управл электр-автоматикой. При процессе обраб происхдт переключ напрвл движ узлов и мех-ов, все действ-я должны быть взаимос-ны. Неконтролир перемещ-ие узлов может привести к аварии. Чтобы этого не произошло сущ спец устройства – контроллеры решающие задачи. В основе теории лежит алгебра логики. Я бы вдул. В ее основе лежит алгебра высказывания (истинно или ложно). Алгебр логики заним вопросами логич операц-й, на основе 2ух высказ-й соед связками «и» «или» «тождеств». На прим эл цепей эти операц мб реализ электронным способом. В начале реализац осущ за счет релейных схем, сейчас за счет интегра-ых. Сист имеет программир контроллеры-специализиров-ые машины.
29. Управление автоматическими линиями.
Авт линии в отличае от унив. оборуд работают по строго опред программе, которая хороктериз циклограммой работы элементов автоматич линии.Гл цель автоматич упр обеспечить работу в соотв с циклограммой.Сист Авт линий сост из подсист: 1 блокированния – исключ несовместим действ 2 контроля разм 3 сигнализац (информ о критич ситуац)
![]()
По ур возд они деляться на внутр и внешн, обеспеч управл на ур операции. Системы этого уровня выполняют те же фун-ции что и сис-мы управл отдельн станков. Ссит этого уровня следят за работой отдельнх изделй, синхронихир их работу и только при необхо-и вмешиваю-я в процесс вып операц-и.
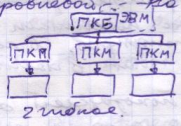
Для автомати-ии регулир процессы изготвл деталей необх обеспеч управляю-ие воздейств, котор выраб устрост-и электрич, механич, гидравличиск-и. Для управл автом линиями прим сис путевод управлен. Релейно-контактной аппаратуры. Этот вид упр уходит в прошлое, и заменяется на управл от программируемых контроллеров (команда-аппарат) Програмир контроллеры создаются на основ процессорной техники и представляют собой ЭВМ. Програмир контролеры по возможностям и ур применения делятся на программируемые контроллеры малые (ПКМ) малые ПКМ примен-ся для обеспеч внутр сист управлен-я. Большие ПКБ обеспеч внешней сис-ой управлен-ие в том случ если задача упрал-ия большого управл сложна, то параллельно подключ ЭВМ
.
![]()
1 жеская 2 гибкая. В любой автомтич линии кроме сист обеспеч упрвл контроллером иммется система ручного управл, которо прим как в наладочном режиме, так и в аварийном. При выб обьектов управления програми контроллерами применя-ся сложно-ть и техн-ть принадлежн. Т.е автоматич линия развив на участке при налич оборуд одной техн-кой группе или по обьеден-ей обьекты транспортной сист. Кроме этого учитыв также кол-во ед управляемого оборудыв. При наладке станка или авт линии управл с пульта отключается. Пульт управление авт линиями устанавл в иаком месте, где установл органы управл лучше видно.
Принципы управления и регулирования, классификация автоматических систем
Математические модели систем управления (функциональные схемы САУ, уравнения динамики, приведение их к форме в отклонениях и обезразмеривание)
Передаточные функции систем управления (определение передаточных функций звеньев САУ, свертка структурных схем)
Импульсные автоматические системы (классификация, передаточные функции, устойчивость и качество)
Общие сведения о нелинейных САУ и особенности их работы
Гармонические коэффициенты усиления нелинейных звеньев
Исследование автоколебаний и устойчивости релейных систем
Адаптивные системы резания, регулирующие точность обработки
Процессы резания с автоматическим регулированием силы резания
Основные элементы автоматических систем (перечень, назначение, требования)
Чувствительные элементы САУ (назначение, требования, перечень)
Контактные и реостатные электрические датчики
Индуктивные электрические датчики
Емкостные электрические датчики
Усилительные элементы САУ (назначение, классификация и основные характеристики)
Электронные, магнитные и электромашинные усилители
Электромеханические (релейные) усилители
Гидравлические усилители
Электрические и гидравлические исполнительные элементы САУ
Геометрическая задача управления
Интерполяция и интерполяторы
Логическая задача управления
Программируемые контроллеры
Технологическая и терминальная задачи управления
Системы управления с ЧПУ (состав и классификация)
Конструктивные особенности станков с ЧПУ
Классификация систем управления промышленными роботами
Характеристики САУ промышленными роботами
Управление автоматическими линиями
Типовые задачи управления производством
Классы систем управления
Классы структур АСУ
Эффективность автоматизации