

то
Вопрос № 1
Матрицы и операции над ними. Свойства операций.
Матрицей называется прямоугольная таблица чисел состоящих из M столбцов и N строк.
Квадратная матрица- (NxN)
Матрица состоящая из одного столбца наз-ся матрицей столбцом, из одной строки соответственно. У матриц столбца и строки существует называние – ВЕКТОР.
Нулевой матрицей называется матрица у которой все элементы равны нулю .
Линейные операции
Это операции сложения вычитания, умножения на число.
Сложение
Суммой матриц А и Б размерности (мхн) называется матрицы С размерности (мхн), каждый элемент которой представляет собой сумму соответствующих элементов элементов матриц А и Б.
Разность
Разностью матриц А иБ размерности… называется матрица С размерности (мхн) каждый элемент которой представляет собой разность соответсвующих элементов матриц А иБ.
ЗАМЕЧАНИЕ: Операции сложения и вычитания можно производить с матрицами олной размерностию.
Умножение
Произведение матрицы А размености мхн на число альфа называется матрица С разме мхн полученная умножением каждого элемента на альфа.
Свойства операций
Если матрицы А Б С имеют одну размерность то для них справливы свойства
А+б=б+а коммуникативность
(а+б)+с=а+(б+с) ассоциативности
1*А=А существование единого элемента
0+а=а
А*0=0если существуют действит числа альфа и бэта
Альфа(бэта*А)=(альфа*бэта*А)
(Альфа+бэта) А=альфа* А + бэта*А
Альфа(а+б)=альфа*а+альфа*б
А и (-б): а-б=а+(-б) где –б=-1*б
ЗАМЕЧАНИЕ разность двух матриц А и Б мхн можем представить в виде суммы матриц.
Умножение матриц
Произведение матриц А мхн на матрицу Б нхк называется матрица С=а*б=Сpt размерности мхк где Сpt сумма Apz*Bzt=ap1b1t+ap2b2t…. Apn*bnt
Элемент Cpt получен из матрицы С суммой произведений элеметнов строки матрицы А на соответствующие элементы столца матрицы Б.
ЗАМЕЧАНИЕ: Если матрица А перемножается на матрицу Б то не обязательно матрица Б будет умножаться на матрицу А
В общем случае АБнеравноБА Если АБ=БА то говорят что матрицы А и Б обладают св-м коммутативности.
Сво-ва умножения матриц:
А(б+с)=АБ+АС
(Б+С)А=БА+СА
(АБ)С=А(БС)
Альфа (АБ) =(альфа*А)*Б=А(альфа*Б) где альфа любое деств число
Квадратная матрица Е размерности мхн называется единичной если все элементы главной диагонали равны 1, а все остальные равны 0.
Вопрос №2
Результатом транспонирования матрицы А мхн является матрица АТ размерности НхМ каждый элемент которой получается заментой элементов строки на соответсвующие элементы столбца.
Свойства транспон матрицы
А=(АТ)Т
(А+Б)Т=АТ+БТ
(АБ)Т+АТ*БТ
(лямбда*А)Т=лямбдаАТ где лямбда есть константа
Определители матрицы
Определитель матрицы второго порядка называется число которое определяется следующим образом |A|=detA= a11*a22-a12*a21
Свойства определителя матрицы второго порядка
1) |A|=|AT| определитель транспонираванной матрицы равен определителю исходной матрицы
2) Если в определитель матрицы А поменять местами какие-либо строки или столбцы то знак определитля меняется на противоположный.
3)Общий множитель какой-либо строки(столбца) можно выносить за пределы определителя.
4)если в определителе какие-либо 2 строки/столбца равны между собой то определитель такой матрицы равен нулю
5) если какая-либо строка/столбец равна нулю то определитель матрицы равен нулю.
ЗАМЕЧАНИЕ: элементы диагонали квадратной матрицы начинающиеся в левом верхнем углу и идут в правый нижний – элементы главной диагонали. Другие- побочные.
6) если к элементам какой-либо строки/столбца прибавить соотвествующие элементы какой-то другой строки/столбюца то определитель не изменяется
7)Если какая-либо строка/столбец составлен из суммы 2х или нескольких элементов то такой определитель можно составить как сумму двух или нескольких определителей каждый элемент которго не изменен, кроме данной строки/столбца. Первый элемент строки/столбца нах-ся в первом определителе, второй элемент строки/столбца нах-ся во втором определителе
Определитель 3го порядка
Это число которое вычисляется следующим способом
Вычисление определителя матрицы А разложением элеменом по первой строке.
Минором соответсвующего элемента матрицы А 3го порядка называется определитель второго порядка полученный путем вычеркивания i-ой строки j-го столбца
!!!Значит определитель матрицы А 3го порядка модно переписать следующим образом
|A|=a11*M11-a12*M12+a13*M13
Алгеброическое дополнение А элемента а определителя 3го порядка называется его минор M взятый со занком + если и+жи четное и наоборот.
Обратная матрица
Матрица А в -1 называется обратной если произведение обратной матрицы на исходную дает единичную матрицу Е тю.е А в -1*а=Е
Для того чтобы матрица А имела обратную матрицу небходимо и достаточно чтобы матрица А была не вырожденной.
А в-1= 1/|A|*(A*)T
Вопрос №3
Системой уравнений называется совокупность n уравнений (n>=2), для которых необходимо найти неизвестные, удовлетворяющие всем уравнениям.
Системой линейных уравнений с n неизвестными x1, x2,… xn называется система вида:
a11x1+a12x2…+a1nxn=b1
a21x1+a22x2…+a2nxn=b2
an1x1+an2x2…+annxn=bn
Матричный вид системы:
AX=B, где A-матрица размерности(m x n), составленная из коэффициентов, B-матрица-столбец, составленная из свободных слагаемых, X-матрица-столбец, составленная из неизвестных.
Метод Крамера на листке!
В элементарные преобразования уравнений включаются: перестановка строк и столбцов местами, умножение любой строки на какое-либо число, сложение строк (столбцов) друг с другом.
Метод Гаусса для произвольных систем заключается в последовательном исключении неизвестных по определенной схеме. Выписывают расширенную матрицу, затем,
С помощью элементарных преобразований приводят матрицу к трапецеидальному виду.
Рангом матрицы А называется наибольший из порядков её миноров, не равных 0. Ранг матрицы А, имеющей порядок r называется базисным. Ранг матрицы А обозначается как r(A)=rang(A).
Теорема Кронекера-Капелли:
Для того, чтобы СЛУ AX=B была совместной, необходимо и достаточно, чтобы ранг расширенной матрицы совпадал с рангом основной матрицы. При этом, если ранг осн. Матрицы=ранг расшир. Матрицы=n (n-количество неизвестных, то система определённая, если система совместная (Ранг осн.м.=ранг расшир.м.<n), то система неопределенная.
Для того чтобы СЛУ имела не нулевые решения необоходимо и достаточно чтобы ранг матрицы был меньше чем n
Если ранг равен количеству неизвестных то из т Кронекера капели следует что система имеет одно решение
Вопрос №4
Однородные системны ЛУ
Если свободные слагаемые СЛУ b1 b2 bn равны нулю то такая система называется однородная
Тетрадь еба
Вопрос №5
Пространство арифметических векторов -множество арифмитических векторов для которых определены операции сложения умножения на число.
Линейные операции над векторами
Суммой вектора а и б называется вектор с начало которого совпадает с началом вектора а, а конец совпадает с концом вектора б при условии что б выходит из конца вектора а.
Сумма можно вычислять по правилам: треугольника и ПА.
Разность векторов а и б называется вектор д такой что при сложении с веткором б дает вектор а, т.е. д=а-б, если д+б=а
Разность векторов а и б можно представить в виде суммы векторов а и (-б) т.е. а-б=а+(-б)=д
Умножение вектора а на число аольфа называется вектор б=альфа*а при этом длина вектор б = альфа * длина а. Направление вектора б зависит от альфа. Если альфа больше нуля то а и б сонаправленные и наоброт.
Линейная зависимость векторов
Линейной комбинацией векторов а1,а2…аn называется вектор а представленный в виде а= альфа1*а1+альфа2*а2…
Если нам даны векторы а б с компланарные то вектор с мы можем представить в виде суммы векторов а и б т е с=а+б
Векторы а1,а2 называется линейно завысимыми если существуют числа альфа…. Из которыхз хотя бы одно отлично от нуля такие что альфа1*а1+альфа2*а2…..=0
Векторы а1 а2…. N>1 линенйно зависимы когда по крайней мере один из них является линейной комбинацуией остальных.
Два вектора а и б линейно зависимы когда они колинеарны
Если векторы е1 и е2 неколинеарны в некоторй плоскости то третий вектор а из той же плостости можно представить едиснтвенным образом а=хе1+уе2
Для того чтобы 3 вектора а б с были линейно независимыми чтобы они были некомпланарные
Три упорядоченных линейно независимых вектора называется базисом
Любой вектор а может быть разложен по базису е1 е2 е3 это значит что а= хе1+уе2+ze3 (xyz)-координаты вектора а
Гооврят что вектор а разложен по базису.
Базис называется орнормированным если координаты вектора взаимно перпендикулярны
Вопрос №6
Вектор- направленный отрезок. Нулевой вектор это вектор у котрого начало и конец совпадает. Модуль вектора-это расстояние между началом и концом вектора.
Скалярное произведение векторов - число, полученное след. Образом:
(a,b)=а*b*cosx (x-угол между a и b)
Если вектор a скалярно умножен сам на себя, то (a,a) * cos 0= a
Если векторы a и b перпендикулярны, то (a,b) = a*b*cos п/2=0
Векторным произведением векторов a и b называется вектор c, обозначается c=a x b, если выполняются условия:
c=a * b * sin g, где g – угол между a и b.
A перпендикулярен c, b перпендикулярен c.
A, b, c образуют правую тройку
Вектор c дает нам площадь параллелограмма, построенного на векторах a и d.
Свойства векторного произведения:
a x a=0
Антикоммунитативность
A x b = -b x a
3) Сочетательность
4) (a+b) x c=a x c+b x c
Смешанное произведенгие векторов а б с называется число (ахб),с равное сколярному произведению векторов (ахб) и вектора с.
Свойства смешанного произведения:
1) (ахб,с)=(бхс,а)=(сха,б)=-(бха,с)=-(съб,а)=-(ахс,б)
2) (ах(б+д),с)=(ахб,с)+(ахб,с)
(ахб,с+д)=(ахб,с)+(ахб,д)
3) (альфа*ах б,с)=(ахальфа*б,с)=(ахб,альфа*с)=альфа(ахб,с) где альфа константа
УТВЕРЖДЕНИЕ: Небохдимым и достаточным условием кмопланарности векторов а б и с явлется равенство 0 их смешанного произведения.
2 вектора называются коллинеарными, если они лежат на одной прямой, либо на параллельных прямых.
3 вектора называются компланарными, если они находятся в одной или в параллельных плоскостях. Смешанное произведение компланарных векторов равно 0.
2 вектора ортогональны, если их скалярное произведение равно 0.
Бзаис в трезмерном простанстве
Три вектора , ![]() ,
называются линейно-независимыми,
если они не лежат в одной плоскости.
,
называются линейно-независимыми,
если они не лежат в одной плоскости.
Базисом в трехмерном пространстве R3 называется упорядоченная тройка любых линейно-независимых векторов.
Если
-
базис в R3, то любой другой вектор,
например ![]() ,
единственным образом разлагается по
этому базису
,
единственным образом разлагается по
этому базису
![]()
где числа da, db, dc находятся единственным образом и называются координатами вектора в базисе
Базис называется прямоугольным (ортогональным), если векторы попарно перпендикулярны. Если они к тому же имеют длину, равную единице, то базис называется ортонормированным.
В пространстве R3 обычно используют
прямоугольную декартову систему
координат Оxyz, где любая точка М
пространства, имеющая координаты х
(абсциссу), y (ординату) и z (аппликату),
обозначается М(x, y, z).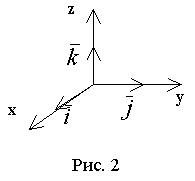
Свободный вектор, например , заданный в координатном пространстве Oxyz, может быть представлен в виде
![]()
Здесь xd, yd, zd - проекции вектора
на
соответствующие оси координат (координаты
вектора),
![]() -
орты этих осей.
-
орты этих осей.
Пишут ![]()
Длина вектора определяется по формуле
![]()
Направление вектора определяется углами α, β, γ, образованными им с осями координат Ox, Oy, Oz. Косинусы этих углов (так называемые направляющие косинусы вектора) вычисляются по формулам:

Координаты вектора будут равны
![]()
Подставив эти выражения в формулу вычисления длины вектора, установим, что направляющие косинусы вектора связаны соотношением
![]()
Операции в координатной форме
http://mathhelpplanet.com/static.php?p=linyeinye-operatsii-nad-vektorami-v-koordinatnoi-forme
Геометрический смысл смешанного
произведения. Смешанное произведение
3-х векторов с точностью до знака равно
объёму параллелепипеда, построенного
на этих векторах, как на рёбрах, т.е. ![]() .
.
Таким образом, ![]() и
и ![]() .
.
Смешанное и векторное произведения векторов в координатной форме.
Теорема.
Пусть ![]() ,
, ![]() ,
, ![]() .
Тогда:
.
Тогда:
1) ![]() ;
;
2)  .
.
Доказательство. 1) Используем свойство линейности векторногопроизведения:
![]()
![]()
![]()
![]() .
.
Далее, заметим, что векторные произведения коллинеарных векторов равны нулевому вектору:
![]() .
.
Рассмотрим другие векторные произведения базисных векторов:

рис.4.
![]() ,
, ![]() ,
, ![]() .
.
Эти равенства легко устанавливаются с помощью рис.4.
Отсюда
следует: ![]()
![]()
![]()
![]() ,
ч.т.д.
,
ч.т.д.
2) Воспользуемся только что доказанной формулой:
![]() .
.
Теперь, по теореме о скалярном произведении векторов в координатной форме, получаем:
![]()
![]()
 ,
ч.т.д.
,
ч.т.д.
Теорема доказана.
Замечание. Векторное произведение часто записывают в форме определителя:
 .
.
Разумеется это не определитель, а лишь форма записи векторногопроизведения. Она компактна и удобна для запоминания.
Следствие. Определитель не изменяется при круговой перестановке строк (столбцов) определителя. При транспозиции двух строк (столбцов) определитель меняет знак.
Доказательство. С одной стороны,
.
С другой стороны,
 .
.
Но, ![]() ,
откуда и следует утверждение. Далее,
т.к.
,
откуда и следует утверждение. Далее,
т.к. ![]() ,
то
,
то
 .
.
Так как определитель не изменяется при транспонировании, то доказанное свойство справедливо и для столбцов определителя.
Следствие доказано.
Вопрос №7
10.1. Основные понятия
Линия на плоскости рассматривается (задается) как множество точек, обладающих некоторым только им присущим геометрическим свойством. Например, окружность радиуса R есть множество всех точек плоскости, удаленных на расстояние - R от некоторой фиксированной точки О (центра окружности).
Введение на плоскости системы координат позволяет определять положение точки плоскости заданием двух чисел — ее координат, а положение линии на плоскости определять с помощью уравнения (т. е. равенства, связывающего координаты точек линии).
Уравнением линии (или кривой) на плоскости Оху называется такое уравнение F(x;y) = 0 с двумя переменными, которому удовлетворяют координаты x и у каждой точки линии и не удовлетворяют координаты любой точки, не лежащей на этой линии.
Переменные x и у в уравнении линии называются текущими координатами точек линии.
Уравнение линии позволяет изучение геометрических свойств линии заменить исследованием его уравнения.
Так, для того чтобы установить лежит ли точка А(x0; у0) на данной линии, достаточно проверить (не прибегая к геометрическим построениям), удовлетворяют ли координаты точки А уравнению этой линии в выбранной системе координат.
Задача о нахождении точек пересечения двух линий, заданных уравнениями F1(x1;y1) = 0 и F2(x2;y} = 0, сводится к отысканию точек, координаты которых удовлетворяют уравнениям обеих линий, т. е. сводится к решению системы двух уравнений с двумя неизвестными:
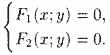
Если эта система не имеет действительных решений, то линии не пересекаются.
Аналогичным образом вводится понятие уравнения линии в полярной системе координат.
Глава 12. Общее уравнение прямой. Уравнение прямой с угловым коэффициентом. Угол между двумя прямыми. Условие параллельности и перпендикулярности двух прямых
В декартовых координатах каждая прямая определяется уравнением первой степени и, обратно, каждое уравнение первой степени определяет прямую.
Уравнение вида
![]() (1)
(1)
называется общим уравнением прямой.
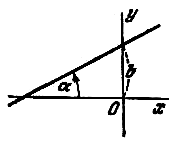
Угол ![]() ,
определяемый, как показано на рис.,
называется углом наклона прямой к оси
Ох. Тангенс угла наклона прямой к оси
Ох называется угловым коэффициентом
прямой; его обычно обозначают буквой
k:
,
определяемый, как показано на рис.,
называется углом наклона прямой к оси
Ох. Тангенс угла наклона прямой к оси
Ох называется угловым коэффициентом
прямой; его обычно обозначают буквой
k:
![]()
Уравнение ![]() называется
уравнением прямой с угловым коэффициентом;
k - угловой коэффициент, b - величина
отрезка, который отсекает прямая на оси
Оу, считая от начала координат.
называется
уравнением прямой с угловым коэффициентом;
k - угловой коэффициент, b - величина
отрезка, который отсекает прямая на оси
Оу, считая от начала координат.
Если прямая задана общим уравнением
,
то ее угловой коэффициент определяется по формуле
![]() .
.
Уравнение ![]() является
уравнением прямой, которая проходит
через точку
является
уравнением прямой, которая проходит
через точку ![]() (
(![]() ,
, ![]() )
и имеет угловой коэффициент k.
)
и имеет угловой коэффициент k.
Если
прямая проходит через точки ![]() (
(![]() ,
, ![]() ),
), ![]() (
(![]() ,
, ![]() ),
то ее угловой коэффициент определяется
по формуле
),
то ее угловой коэффициент определяется
по формуле
![]() .
.
Уравнение
![]()
является уравнением прямой, проходящей через две точки ( , ) и ( , ).
Если
известны угловые коэффициенты ![]() и
и ![]() двух
прямых, то один из углов
двух
прямых, то один из углов ![]() между
этими прямыми определяется по формуле
между
этими прямыми определяется по формуле
![]() .
.
Признаком параллельности двух прямых является равенство их угловых коэффициентов:
![]() .
.
Признаком перпендикулярности двух прямых является соотношение
![]() ,
или
,
или ![]() .
.
Иначе говоря, угловые коэффициенты перпендикулярных прямых обратны по абсолютной величине и противоположны по знаку.
Признаки параллельности прямых (формулировки и примеры). I. Две прямые, параллельные третьей* параллельны. II. Если внутренние накрест лежащие углы равны, то прямые параллельны III. Если сумма внутренних односторонних углов равна 180°, то прямые параллельны. IV. Если соответственные углы равны, то прямые параллельны.
Перпендиуклярность
Две прямые на плоскости называются перпендикулярными, если при пересечении образуют 4 прямых угла.
Уравнение прямой, проходящей через точку, в данном направлении.
т М (х0;у0).
Уравнение
прямой записывается в виде
![]() .
.
Подставим
в это уравнение точку М
![]()
Решим систему:


![]()
![]()
Уравнение прямой, проходящей через 2 точки.
К (х1;у1) М (х2;у2)
![]()
Уравнение прямой в отрезках.
К (а;0); М (0;b)
Подставим точки в уравнение прямой:
![]()
![]()
Уравнение прямой, проходящей через данную точку, перпендикулярно данному
вектору.
М0
(х0;у0).
![]()
Возьмем произвольную точку М (х;у).
![]()
Т.к.
![]() ,
то
,
то
![]()
![]()
Вопрос №8
Эллипс-множество точек плоскости, сумма расстояния от которых до двух данных точек в плоскости, называемых фокусами есть величина постоянная.
Точки пересечние эллипса с осями координат называются вершинами эллипса. Из симметрии эллипса следует что кроме вершин А(а,0) и Б(0,б) эллипс имеет еще 2 вершины А1(-а,0) и Б1(0,-б) отрезки А А1 и Б Б1 соденяющие противоположные врешины эллипса а также их длины 2 а и 2 б называются называеются соотвественно большой и малой осями эллипса. Числа а и б называет большой и малой полуосями элиипса.
Отношении фокального расстояния к длине большой оси называется экцентриситетом эллипса и обозначает эпсилон.
Гипербола-множество всех точек плоскости, абсолютная величина разности расстояний каждой из которых до двух данных точек этой плоскости, называемых фокусами есть величина постоянная.
Отношение фокального расстояния к длине действительной оси называется экцентриситетом пораболы. Действительной осью называет отрезок 2а, который соеденияет вершины гиперболы. Числа а и б называются действительной и мнимой полуюсями гиперболы.
Парабола-множество всех точек плоскости равноудаленных от данной точки F, называемой фокусом, и данной прямой, называемой директрисой. Расстояние от фокуса до директрисы называется параметром параболы.
Эксцентриситет: 
Отношение фокального радиуса к хз чему
Вывод кононического уравнения:
Эллипс x^2/a^2+y^2/b^2=1
Гипербола x^2/a^2-Y^2/b^2=1
Парабола y^2=px p-директриса
Выводы на листке.
Вопрос №9
Пересечение 2ух не компланарных плоскостей образуют прямую в пространстве.
Прямая в пространстве вполне определяется заданием фиксированной точки м и направляющим веткором