

1.3. Математические модели и способы
реализации режима стабилизации
скорости резания
Анализ работы систем ССР показывает, что одновременно с регулированием w в соответствии с (I.I) при изменении R необходимо регулировать и скорости подач по координатам станка так, чтобы оборотные подачи сохраняли своё значение [69]. Таким образом, в процессе работу системы и скорости подач должны изменяться синхронно, имея постоянное соотношение. Для скорости поперечной подачи SR(t) при этом можно записать следующую зависимость
Sr(t)= w(t) Kr (1.9)
где t - текущее время обработки, с;
Кr - оборотная поперечная подача, м/рад.
Радиус обработки R(t) в этом случае равен
 ,
(1.10)
,
(1.10)
где R0 - начальное значение радиуса обработки.
Переходя к изображениям и учитывая направление поперечной подачи (её знак) знаком Кr , получим
 ….(1.11)
….(1.11)
где WR(р) - передаточная функция, характеризующая связь радиуса обработки с угловой скоростью шпинделя.
Введём понятие граничного радиуса обработки Rr, т.е. значения R ниже которого стабилизация V не производится вследствие достижения максимально возможной угловой скорости шпинделя w max = const

Для случая Rr> R c учётом (1.1) и (1.10) справедливы следующие соотношения

w=wmax

(1.13)
когда Rr < R , на основании (1.1), (1.10) получим
 (1.14)
(1.14)
продифференцировав (I.14) и опустив для упрощения обозначение функциональной зависимости переменных от времени - t, запишем
 ,
,
разделяя переменные и интегрируя, найдём
 ,
,
где С - постоянная интегрирования.
Определим С из начальных условий при t=0

и окончательно запишем
 (1.15)
(1.15)
подставив последнее выражение в (I.I), получим
 (I.I6)
(I.I6)
Выражения (1.1), (I.I5), (I.16) описывают идеальный установившийся режим работы системы ССР, к которому необходимо стремиться. В дальнейшем, кроме специально оговорённых случаев, будем всегда считать R > Rr , а w < wmax.
Диапазон регулирования w в режиме ССР определяется пределами изменения R и во многих случаях может потребоваться регулирование w во всём возможном диапазоне главного привода. Применяемый в настоящее время в токарных станках тиристорный электропривод обеспечивает регулирование w двумя способами: изменением потока возбуждения двигателя в сравнительно небольшом диапазоне при постоянной мощности и регулированием якорного напряжения в значительно большем диапазоне при постоянном моменте. При первом способе регулирования использованиё всей мощности, особенно в нижней части диапазона, оказывается невозможным по условию механической прочности передач и режущего инструмента. Поэтому при малых w требуется ограничение вращающего момента на определённом уровне, и регулирование w выполняется с постоянным моментом [50]. Кроме того, в чистовых режимах обработки с малыми мощностями резания не требуется регулировать w с постоянной мощностью [92] . Таким образом, основным способом регулирования w в системах ССР является регулирование якорным напряжением.
В электроприводе с двухзонным регулированием
можно осуществить режим ССР и другим
способом, который следует из выражения
для механической характеристики
двигателя независимого возбуждения
электроприводе с двухзонным регулированием
можно осуществить режим ССР и другим
способом, который следует из выражения
для механической характеристики
двигателя независимого возбуждения
(1.17)
где U - напряжение на якоре электродвигателя;
См - конструктивная постоянная электродвигателя;
Ф - поток возбуждения электродвигателя;
М - момент на валу электродвигателя;
Rя- сопротивление якорной цепи электродвигателя.
Как видно из (1.17) при М = 0 , задании U, пропорциональным V3 , и изменении Ф в функции R в соответствии с (1.1) реализуется режим ССР.
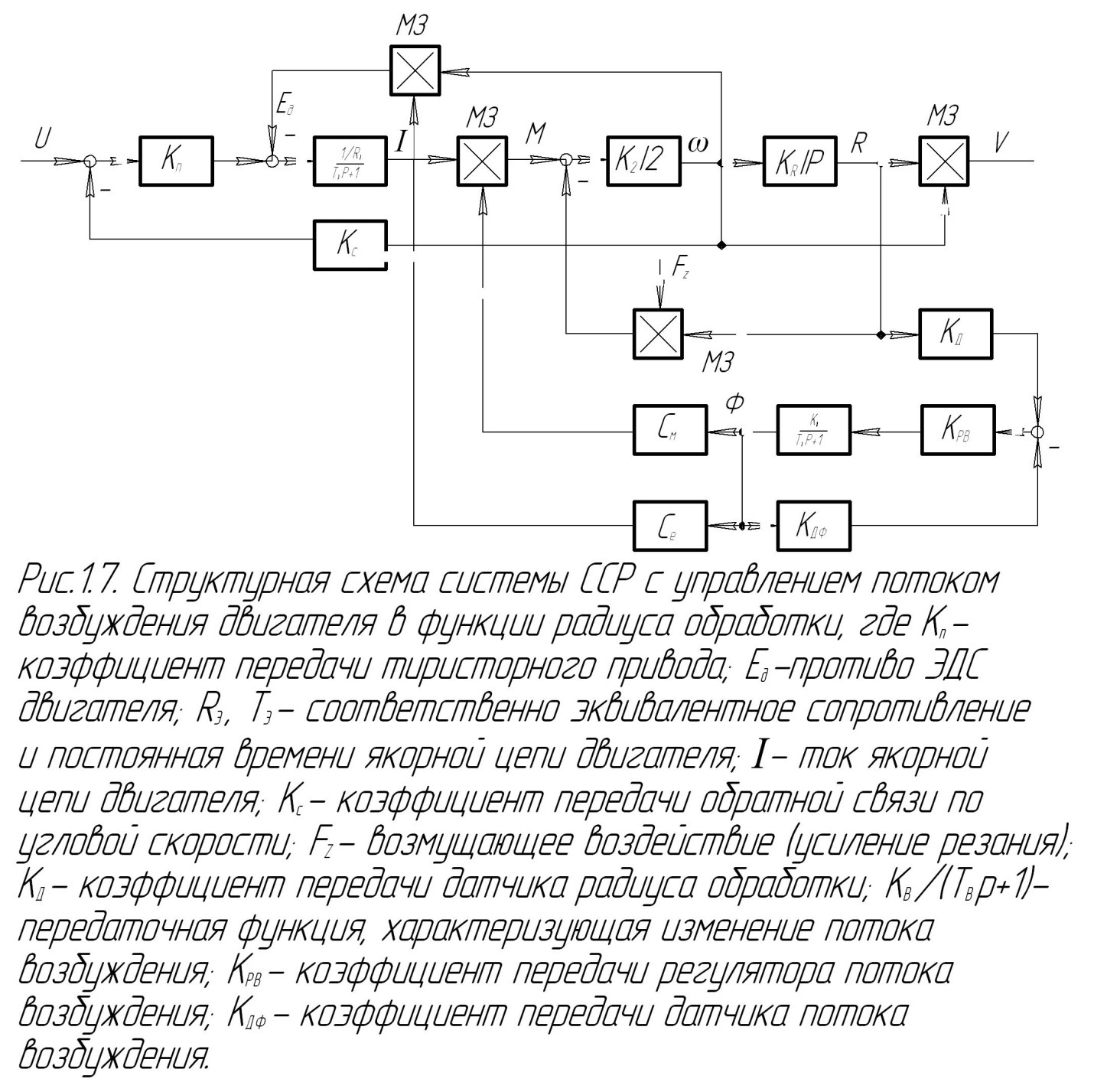
Структурная схема системы ССР на основании [9] при уп. равнении Ф в функции R и пренебрежении вихревыми токами и упругими свойствами кинематических цепей станка может быть представлена так, как это показано на рис. 1.7. Считая, что Fz = const , для этой системы справедливы следующие соотношения
[(U-wK2)Kn--ACmw]=R2(T0I'+I)
[ФСmK2-FzRK2]=w'
TBФ'+(1+KдфKрвKB)Ф=KрвKBKдR

(1.18)
Рассмотрим поведение этой системы в установившемся режиме, при этом все производные в (I.I8) равны нулю. Введя обозначение
(1.19)
на основании третьего уравнения (I.I8) запишем
Ф= Кзв R. (1.20)
Из второго уравнения (I.I8) получим
 (I.2I)
(I.2I)
Подставив в первое уравнение (I.I8) Ф и I из (1.20) и (I.2I), найдём
 (1.22)
(1.22)
Из последнего выражения видно, что в рассматриваемой
системе управление, более близкое к идеальному (1.1), может быть получено при отсутствии обратной связи по угловой скорости, т.е. при Кс=0. В этом случае будем иметь
 (1.23)
(1.23)
а скорость резания будет равна
 (1.24)
(1.24)
Из (1.24) видно, что при отсутствии усилия резания, т.е.Fz=0 (М~0) в системе осуществляется идеальный режим ССР (как указывалось ранее, U задаётся пропорциональным V3). Появление усилия резания приводит к возникновению ошибки по скорости резания.