

Лабораторная работа №5
ИССЛЕДОВАНИЕ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ АСИНХРОННОЙ НАГРУЗКИ ПРИ ПЕРЕРЫВАХ ЭЛЕКТРОСНАБЖЕНИЯ И САМОЗАПУСКЕ
Цель работы. Познакомиться с методикой исследования динамической устойчи- вости асинхронной нагрузки на ЭВМ и определить влияние реактив-
ности питающей сети на допустимую длительность перерыва
электроснабжения и самозапуск.
Рассмотрим динамическую устойчивость асинхронной нагрузки, под которой следует понимать способность асинхронного двигателя восстанавливать исходный режим или близкий к нему после больших возмущений. Такими возмущениями могут быть, например, короткое замыкание на питающей линии или перерыв электроснабжения, вызванный переключением двигателя на другой источник питания.
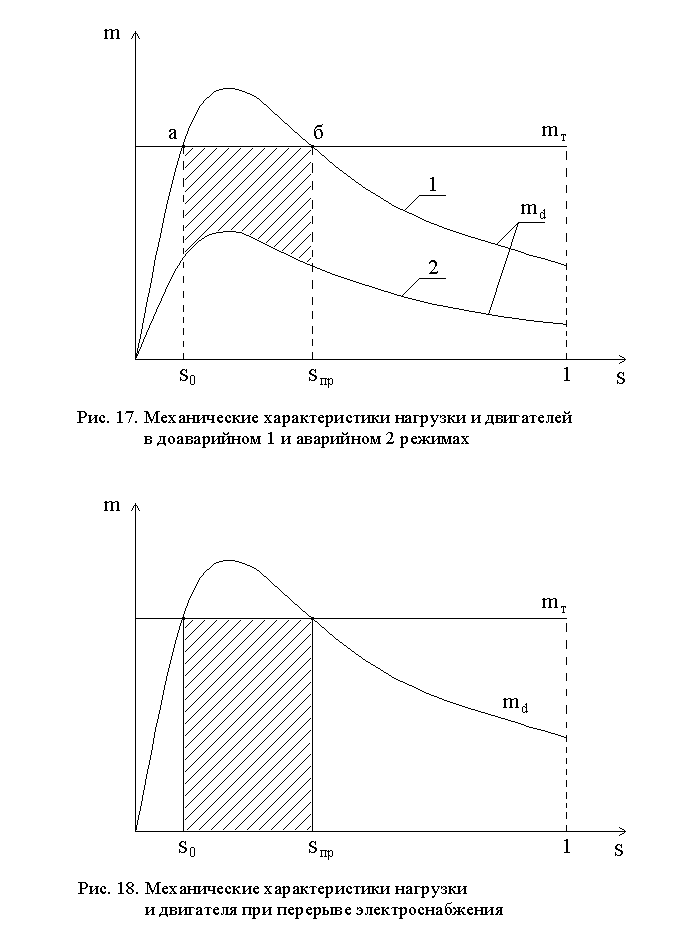
Исследование динамической устойчивости проведем для схемы рис.10, в которой асинхронный двигатель питается через реактивное сопротивление сети xC от генератора бесконечной мощности и вращает производственный механизм с тормозным моментом mт. При коротком замыкании на питающей линии напряжение на двигателе снижается и уменьшается момент двигателя. На рис.17 приведены механические характеристики двигателя md=f(s) в доаварийном (кривая 1) и аварийном (кривая 2) режимах и механическая характеристика нагрузки mт=const . В доаварийном режиме двигатель работал со скольжением s0 . Произошло короткое замыкание, напряжение на двигателе уменьшилось, этому режиму соответствует характеристика 2. Так как при замыкании md<mт, то двигатель начинает тормозиться, т.е. скольжение увеличивается.
Для режима замыкания обычно необходимо определить предельную продолжительность замыкания, в течение которой при восстановлении напряжения двигатель может восстановить нормальную работу. Из рис.17 следует, что если двигатель до замыкания работал со скольжением s0 (точка а), то при замыкании оно может увеличиваться до sпр (точка б), так как при s> sпр после восстановления напряжения md< mт и двигатель остановится.
Еще более тяжелым режимом является перерыв электроснабжения двигателя, так как в бестоковую паузу момент двигателя md становится равным нулю. В этом случае скольжение также не должно принимать значение s>sпр (рис.18), иначе двигатель не сможет уже прекратить торможения.
Однако предельное время в этом случае будет значительно меньше, так как md=0 и скольжение будет расти быстрее. В лабораторной работе изучается этот случай как наиболее тяжелый.
Время, необходимое для изменения скольжения от s0 до sпр, может быть определено интегрированием уравнения движения ротора:
![]() ,
(31)
,
(31)
где TJ =Jпр0н /Рн –постоянная инерции агрегата, приведенная к номинальной мощности двигателя; 0 и н –синхронная и номинальная угловые скорости двигателя, с –1; Рн – номинальная активная мощность двигателя, Вт; Jпр-приведенный момент инерции агрегата, кгм2, равный сумме момента инерции двигателя Jd и приведенного к валу двигателя момента инерции механизма Jм [5]:
![]() ,
,
где нм, нd – номинальные угловые скорости механизма и двигателя.
Уравнение (31) можно проинтегрировать непосредственно относительно скольжения s и привести к виду
![]() (32)
(32)
и, следовательно,
 (33)
(33)
Таким образом, задача определения предельной длительности возмущающего воздействия сводится к вычислению площади, ограниченной кривой:
![]()
осью абсцисс и ординатами (s0) и (sпр), которая обратно пропорциональна площади, заштрихованной на рис. 18.
Для вычисления площади на ЭВМ моделируются механические характеристики нагрузки двух видов (см. рис. 6), построенные в относительных единицах:
а) mT = const;
б) mT = mтр+(кЗ – mтр)(1-s).
Здесь введены такие же обозначения, что и в формулах (13).
В случае перерыва электроснабжения предельное время автоматического ввода резерва в частных случаях можно найти по формуле (33) аналитическим путем. Так для mT = const, получим
 ,
(34)
,
(34)
а для mтр=0 и =1 находим
 .
(35)
.
(35)
При mтр0 и 1 интеграл (33) не выражается через элементарные функции и его надо вычислять численными методами. Отметим, что падающая зависимость тормозного момента от скольжения приводит к увеличению sпр и, следовательно, tпр .
Механическая характеристика асинхронного двигателя (в относительных единицах) при s>sкр , как и в предыдущих лабораторных работах, строится по формуле (14). А при ssкр при построении механической характеристики двигателя применим более точную формулу [6]
 (36)
(36)
где sкр – критическое скольжение, соответствующее максимальному моменту на валу двигателя [6]:
 (37)
(37)
где с1
– коэффициент преобразования (с1
1,03);
![]() ,
,
,
,
![]() ,
,
![]() , x
- параметры
, x
- параметры
Т-образной схемы замещения асинхронного двигателя (см. рис. 2, формулы (2)-(9)). Схема замещения всей цепи приведена на рис. 19.
Сначала в лабораторной работе изучается динамическая устойчивость асинхронной нагрузки при перерывах электроснабжения, строятся механические характеристики двигателя md =f (s) и нагрузки mт=f (s) (рис.18), определяются s0 , sпр и tпр и выводятся на экран над графиками. Механическая характеристика двигателя строится по формулам (14) и (36).
Если xC 0, то напряжение на двигателе не остается постоянным, поэтому механическая характеристика зависит от напряжения и принимает вид

где md – момент двигателя, который вычисляется по формулам (14) и (36); Ud – напряжение на двигателе, которое зависит от соотношения полных сопротивления двигателя zd и всей цепи z [3]:
Сопротивления
двигателя (активное rd
и реактивное xd
) в лабораторной работе вычисляются
упрощенно, пренебрегаем цепью
намагничивания (рис.19) и получим
![]() и
и
![]() .
.
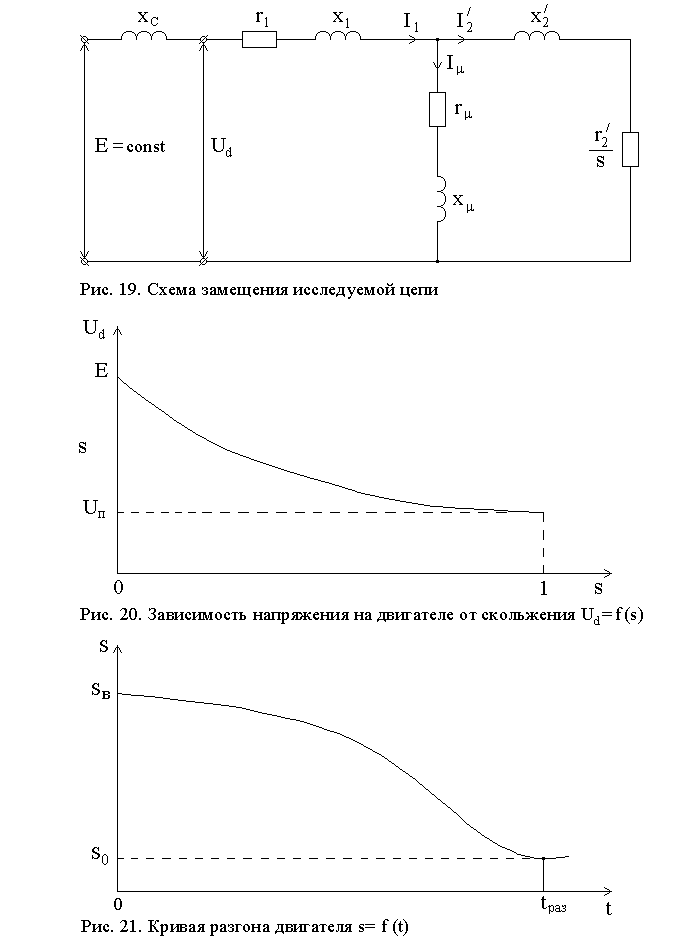
Но при исследовании динамической устойчивости асинхронной нагрузки нельзя пренебречь вытеснением тока ротора с ростом скольжения, поэтому сопротивления и вычисляются по формулам (4) и (5). На рис. 20 приведена зависимость напряжения на двигателе от скольжения Ud= f (s).
Критическое скольжение также зависит от сопротивления xC:
 .
.
Затем исследуется динамическая устойчивость асинхронной нагрузки при самозапуске, под которым следует понимать процесс восстановления нормальной работы асинхронного двигателя после снижения напряжения на двигателе или после перерыва электроснабжения. Этот режим изучается потому, что его условия существенно отличаются от обычного пуска:
- при пуске нагрузка обычно увеличивается постепенно после разгона двигателя, а
самозапуск происходит, как правило, при полностью включенной нагрузке;
- при пуске двигатели, питающиеся от одного источника, включаются и запускаются поэтапно, а при самозапуске все двигатели запускаются одновременно, что
приводит к увеличению тока источника и снижению напряжения на двигателях;
- при самозапуске все или часть двигателей вращаются с остаточной скоростью.
Весь процесс расчета самозапуска можно разделить на четыре основных этапа. Рассмотрим эти этапы для случая перерыва электроснабжения. Первый этап – определение выбега двигателя, т.е. вычисление скольжения sв, до которого происходит его увеличение в течение бестоковой паузы.
Второй этап - оценка возможности самозапуска, которая сводится к сравнению электромагнитного момента двигателя md с механическим моментом сопротивления mт при подаче напряжения. При этом должно выполняться условие [9]
md>mт . (38)
( Некоторые авторы приводят другое условие md 1,1 mт. Выбор условия зависит от значения кратности максимального момента двигателя bm . Если это значение определено с учетом к.п.д. и отнесено к валу двигателя, то следует брать условие (38). Если значение bm определено без учета к.п.д., то необходим 10 % запас по мощности. В табл.1 все значения bm отнесены к валу двигателя.)
Третий этап – разгон и восстановление рабочего режима. Этот этап сводится к определению времени самозапуска t раз .
Четвертый этап – расчет нагрева электродвигателя за время разгона tраз. (В лабораторной работе вопросы расчета нагрева не рассматриваются).
Динамическая устойчивость при самозапуске в лабораторной работе исследуется для схемы (рис.10). На первом этапе задается время перерыва электроснабжения, по формулам (13), (14) и (36) строятся механические характеристики нагрузки и двигателя и определяется выбег sв, т.е. скольжение соответствующее tпер. На втором этапе сравниваются md и mт и оценивается возможность самозапуска. Если самозапуск возможен, то на третьем этапе строится кривая разгона s = f (t) (рис. 21) и определяется время разгона.
Задание к работе
Для варианта, указанного преподавателем, по паспортным данным двигателя определить:
- критическое скольжение sкр (формула (37));
- параметры Т-образной схемы замещения r1 (формула (3)), x1 (формула (9)), (формула (4)), (формула (5)) и х (формула (2)).
Параметры Т-образной схемы замещения можно взять из лабораторной рабо-
ты №3, необходимо только заново определить сопротивление х , так как оно зависит от sкр , для вычисления которого в этой работе применена другая формула расчета.
Порядок выполнения работы
1. Включить ЭВМ и загрузить программу lab5(2а).exe или lab5(2b).ехе (lab5(2а).exe - 1–8 варианты, lab5(2b).exe - 9–16 варианты).
Ввести паспортные данные двигателя (табл. 1).
Ввести расчетные параметры Т-образной схемы замещения и критического скольжения sкр.
Ввести исходные данные нагрузки (табл. 2). Сначала I и II этапы исследования выполняются для случая =0.
Выполнить I этап работы (Исследование динамической устойчивости асинхронного двигателя при питании от шин бесконечной мощности для нагрузки mT = const):
а) построить механические характеристики md =f (s) и mT =f (s), определить по ним предельные значения скольжения sпр и времени перерыва электроснабжения t пр;
б) принять время перерыва электроснабжения t пер=0,5 t пр , построить для него
механические характеристики md =f (s) и mT =f (s), определить по ним выбег двигателя sв;
в) рассмотреть самозапуск двигателя, построить кривую разгона s=f(t) и найти время разгона t РАЗ;
г) оценить основные результаты этапа.
Выполнить II этап работы (Исследование динамической устойчивости двигателя при питании его через реактивное сопротивление хС с диапазоном изменения к=хС / x max =0–1,25 для нагрузки mT = const) и для каждого значения хС:
а) построить зависимость напряжения на двигателе от скольжения Ud = f (s), по ней определить напряжение при пуске UП;
б) построить механические характеристики md = f (s) и mT = f (s), по ним
определить значения предельных скольжения sпр и времени перерыва электроснабжения t пр;
в) принять время перерыва электроснабжения t пер = 0,95 t пр, построить для него
механические характеристики md =f (s) и mT =f (s), определить по ним выбег двигателя sв;
г) рассмотреть самозапуск двигателя, построить кривую разгона s= f (t) и найти время разгона t раз.
Результаты выполнения п.6 занести в таблицу, по данным таблицы построить
зависимости UП= f (к), t пр=f (к), s пр=f (к), sB= f (к) и t раз=f (к).
Оценить полученные результаты.
Все построенные программой зависимости для к=0,5 снять для отчета.
Таблица
К |
0 |
0,25 |
0,5 |
0,75 |
1 |
1,25 |
UП |
|
|
|
|
|
|
s пр |
|
|
|
|
|
|
t пр |
|
|
|
|
|
|
sB |
|
|
|
|
|
|
t раз |
|
|
|
|
|
|
Ввести исходные данные новой нагрузки ( 0), табл. 2.
Выполнить III этап работы (Исследование динамической устойчивости асинхронного двигателя при питании от шин бесконечной мощности для нагрузки m т const). Повторить п.5 для нагрузки 0.
Выполнить IV этап работы (Исследование динамической устойчивости асинхронного двигателя при питании его через реактивное сопротивление хС с диапазоном изменения к=хС / x max =0–1,25 для нагрузки m т const).
Повторить п.6. для нагрузки 0.
10. Составить отчет, который должен содержать:
а) название и цель лабораторной работы;
б) исследуемую схему и исходные данные;
в) расчетные параметры Т-образной схемы замещения и sкр;
г) все графические зависимости, полученные при выполнении I–IV этапов и две
заполненные таблицу (II и IV этапы)
д) сравнение результатов для m т =const и m т const;
е) выводы по работе.