

Міністерство освіти і науки молоді та спорту України
Державний вищий навчальний заклад
Український державний хіміко – технологічний універсітет
Кафедра деталей машин
Курсовий проект на тему:
Розрахунок одноступінчастого циліндричного редуктора
Розробив студент
Групи 3ХТП(т)-11
________ Кулагін О.Є.
Перевірив викладач
_______ Глечиков В.В
Дніпропетровськ 2011
ЗМІСТ
ЗАВДАННЯ 3
1. Кінематичний і силовий розрахунок передачі 4
2. Вибір матеріалу та визначення допустимих напружень [σH] та [σF] 6
3. Геометричний розрахунок передачі 7
4. Перевірочний розрахунок зубців передачі на міцність 10
5. Конструктивна розробка та розрахунок валів 12
6. Підбір ірозрахунок підшипників 28
7. Конструктивна розробка елементів редуктора 32
8. Вибір змащення редуктора 36
Список літератури 37
Завдання
Розрахувати циліндричну косозубу передачу в закритому корпусі за наступними даними:
ω2= 27- кутова швидкість тихохідного вала, с-1;
Т2=80 - обертальний момент на тихохідному валу, Нм;
Lh= 20000 - термін служби, годин.
Навантаження постійне, але під час пуску воно короткочасно підвищується в 1,6 рази. Вхідний і вихідний вали редуктора з’єднуються з валом електродвигуна й валом робочої машини за допомогою муфт пружних втулочно-пальцевих (МПВП).
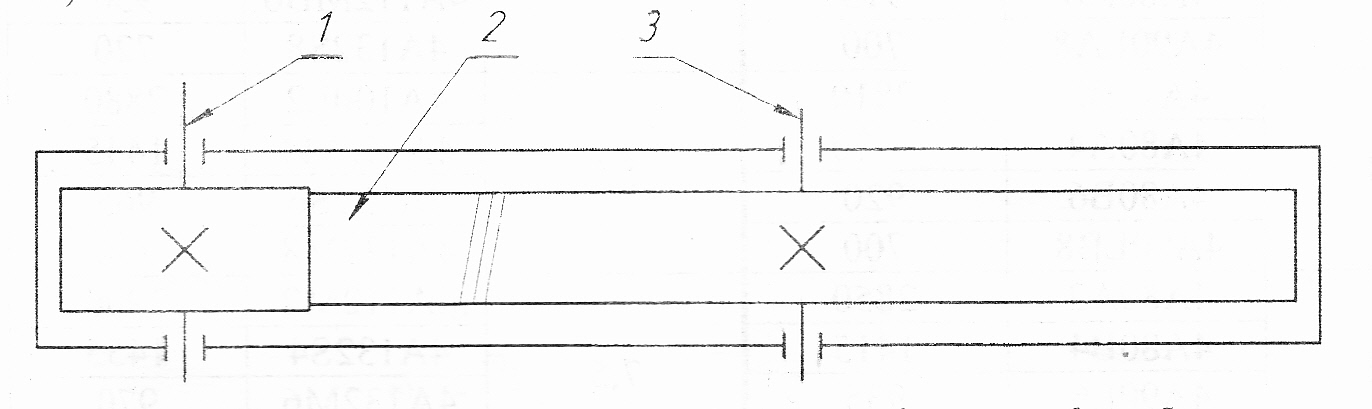
1 - швидкохідний вал: 2 - зубчаста передача: 3 - тихохідний вал
Рисунок 1.1 - Кінематична схема редуктора
1. Кінематичний і силовий розрахунок передачі
1.1. Визначаємо частоту обертання тихохідного вала:
 хв-1 (1.1)
хв-1 (1.1)
де n2 - частота обертання тихохідного вала, хв.-1;
ω2 - кутова швидкість тихохідного вала, с-1;
1.2.Визначаємо потужність на тихохідному валу:
 Вт (1.2)
Вт (1.2)
де Р2 - потужність на тихохідному валу, Вт;
Т2 - обертальний момент на тихохідному валу, Нм.
1.3. Розраховуємо потужність електродвигуна:
 кВт (1.3)
кВт (1.3)
де Р1 - потужність електродвигуна, кВт;
η - ККД одноступінчастого циліндричного редуктора з косими зубцями, (η=0,96)
1.4. За даними формули (1.3) і ГОСТ 19253-81 вибираємо електродвигун. Найбільш широко в приводах машин використовують асинхронні двигуни трифазного струму єдиної серії 4А.
Результати вибору електродвигуна наводимо в таблиці 1.1.
 Таблиця
1.1
Таблиця
1.1
Р1, кВт |
РД, кВт |
nд, об/хв. |
n2, об/хв. |
uф= nд/ n2 |
u СТ СЕВ 221-75 |
Δu |
2,25 |
3,0 |
2840 |
257,96 |
11,01 |
11,2 |
1,7 |
1434 |
5,56 |
3,6 |
0,7 |
|||
955 |
3,7 |
3,55 |
4,3 |
|||
700 |
2,71 |
2,8 |
3,1 |
Остаточно приймаємо електродвигун:
тип 4А90L2
потужність 3,0 кВт
частота обертання вала 1434 об/хв.
1.5. Уточнюємо обертальний момент і частоту обертання на швидкохідному
та тихохідному валу відповідно до прийнятого електродвигуна.
Швидкохідний
вал:
 об/хв.; (1.4)
об/хв.; (1.4)
 с-1 (1.5)
с-1 (1.5)
 Нм (1.6)
Нм (1.6)
Тихохідний вал:
 об/хв. (1.7)
об/хв. (1.7)
 с-1 (1.8)
с-1 (1.8)
 Нм (1.9)
Нм (1.9)
2. Вибір матеріалу та визначення допустимих напружень [σH] та [σF]
2.1. Для виготовлення коліс матеріал приймаємо однієї марки. Різницю твердостей матеріалу забезпечуємо методом термічного оброблення. Для запобігання заїдання зубчастих коліс твердість шестірні повинна бути на 30-70 НВ вище, ніж твердість колеса.
|
Матеріал |
Термообробка |
Твердість, НВ |
σВ, МПа |
σТ, МПа |
1 |
Для шестерні Сталь 40Х |
Поліпшення |
269 |
900 |
590 |
2 |
Для колеса Сталь 40Х |
Нормалізація |
215 |
760 |
490 |
2.2. Визначаємо допустимі контактні напруження для шестірні та колеса:
Для шестерні:
 МПа (2.1)
МПа (2.1)
Для колеса:
 МПа (2.2)
МПа (2.2)
де σН limbi_ базова межа контактної витривалості поверхонь зубців, що відповідає базовому числу циклів напружень;
Sh- коефіцієнт безпеки зубчастих коліс;
Khlі_коефіцієнт довговічності;
Так як НВ1-НВ2<100, то для розрахунків приймаємо менше з [σН]1 і [σН]2.
2.3. Визначаємо допустиме напруження згину:
Для шестірні: МПа (2.3)
МПа (2.3)
Для колеса:
 МПа (2.4)
МПа (2.4)
де σFlimbi_ базова межа контактної витривалості поверхонь зубців, що відповідає базовому числу циклів напружень;
SF- коефіцієнт безпеки SF=1;
KFL_коефіцієнт довговічностіKFL=2;