

39.Аппроксимация производных. Частотные характеристики операторов.
Аппроксимация производных - вторая большая область применения разностных операторов. Оценки первой, второй и третьей производной можно производить по простейшим формулам дифференцирования:
(sn)' = (sn+1-sn-1)/2t h1 = {-0.5, 0, 0.5}
(sn)'' = (sn+1-2sn+sn-1)/t h2 = {1, -2, 1}
(sn)''' = (-sn+2+2sn+1-2sn-1+sn-2)/2t h3 = {0.5, -1, 0, 1, -0.5}.
Оператор первой производной является нечетной функцией и имеет мнимый спектр. Если принять s(t) = exp(jt), то истинное значение первой производной должно быть равно: s'(t) = j exp(jt). Передаточная функция H() = j. Оценка первой производной в точке n = 0 по разностному оператору при t = 1: s'(0) = (exp(j)-exp(-j))/2 = j sin = H1(). Отношение расчетного значения к истинному на той же точке: K1() = sin()/.
Как следует из приведенных выражений и графиков, значение К() равно 1 только на частоте = 0. На всех других частотах в интервале Найквиста формула дает заниженные значения производных. Однако при обработке практических данных последний фактор может играть и положительную роль, если сигнал низкочастотный (не более 1/3 главного диапазона) и зарегистрирован на уровне высокочастотных шумов. Любое дифференцирование поднимает в спектре сигнала долю его высокочастотных составляющих. Коэффициент усиления дисперсии шумов разностным оператором дифференцирования непосредственно по его спектру в главном диапазоне:
В принципе, вторую производную можно получать и последовательным двойным дифференцированием данных оператором первой производной. Однако для таких простых операторов эти две операции не тождественны. Оператор последовательного двойного дифференцирования можно получить сверткой оператора первой производной с самим собой:
2h1 = h1* h1 = {0.25, 0, -0.5, 0, 0.25},
Попутно заметим, что частота Найквиста главного диапазона обратно пропорциональна интервалу t дискретизации данных (N = /t), а, следовательно, интервал дискретизации данных для корректного использования простых операторов дифференцирования должен быть в 3-5 раз меньше оптимального для сигналов с известными предельными частотами спектрального состава.
40.Нерекурсивные частотные цифровые фильтры.
Нерекурсивные фильтры. При нулевых значениях коэффициентов am уравнение (1.1.2) переходит в уравнение линейной дискретной свертки функции x(k) с оператором bn:
y(k) = bn x(k-n) (1.3.1)
Значения выходных отсчетов свертки (1.1.3) для любого аргумента k определяются текущим и "прошлыми" значениями входных отсчетов. Такой фильтр называется нерекурсивным цифровым фильтром (НЦФ). Интервал суммирования по n получил название "окна" фильтра. Окно фильтра составляет N+1 отсчет, фильтр является односторонним каузальным, т.е. причинно обусловленным текущими и "прошлыми" значениями входного сигнала, и выходной сигнал не опережает входного. Каузальный фильтр может быть реализован физически в реальном масштабе времени. При k<n, а также при k<m для фильтра (1.1.2), проведение фильтрации возможно только при задании начальных условий для точек x(-k), k = 1,2,..,N, и y(-k), k = 1,2,..,M. Как правило, в качестве начальных условий принимаются нулевые значения или значения отсчета х(0), т.е. продление отсчета x(0) назад по аргументу.
При обработке данных на ЭВМ ограничение по каузальности снимается. В программном распоряжении фильтра могут находиться как "прошлые", так и "будущие" значения входной последовательности отсчетов относительно текущей точки вычислений k, при этом уравнение (1.1.3) будет иметь вид:
y(k) = bn x(k-n). (1.1.4) При N' = N фильтр называется двусторонним симметричным. Симметричные фильтры, в отличие от односторонних фильтров, не изменяют фазы обрабатываемого сигнала. Техника выполнения фильтрации не отличается от техники выполнения обычной дискретной свертки двух массивов данных. y(k) = b(n) * x(k-n).
Сумма коэффициентов фильтра определяет коэффициент передачи (усиления) средних значений сигнала в окне фильтра и постоянной составляющей в целом по массиву данных (с учетом начальных и конечных условий). Как правило, сумма коэффициентов фильтра нормируется к 1.
С позиций цифровой фильтрации это не что иное, как двусторонний симметричный нерекурсивный цифровой фильтр:
yk = bn xk-n, bn = 0,2. 41.Типы фильтров. Методика расчетов. Идеальные частотные фильтры.
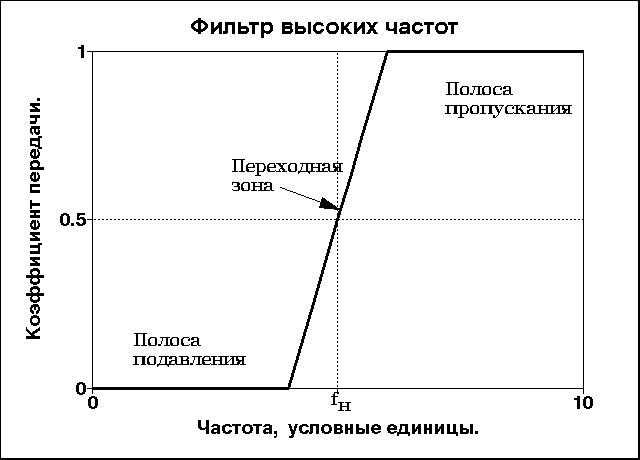
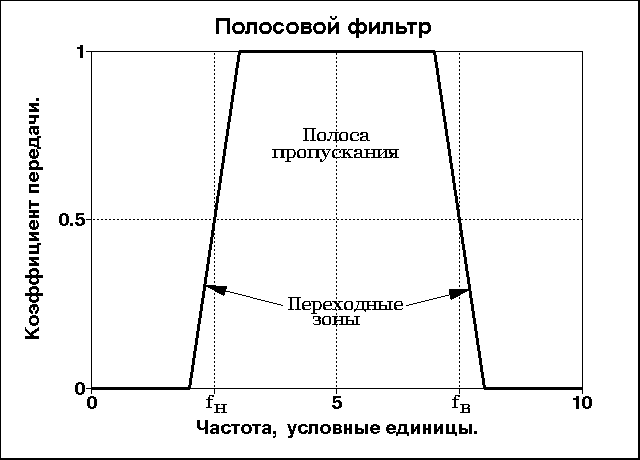
Типы фильтров. Выделяют три основных группы частотных фильтров: ФНЧ - фильтры низких частот (пропускание низких, подавление высоких частот во входном сигнале), ФВЧ - фильтры высоких частот (пропускание высоких, подавление низких частот) и ПФ - полосовые фильтры (пропускание определенных частот с подавлением остальных частот сигнала). Среди последних в отдельную группу иногда выделяют РФ - режекторные фильтры, понимая под ними фильтры с подавлением узкой полосы частот во входном сигнале, и СФ – селекторные фильтры, обратные РФ. Схематические частотные характеристики фильтров приведены на рисунке 4.1.1.
П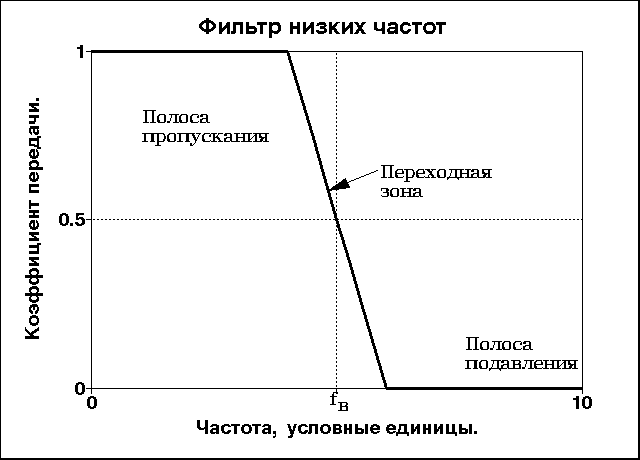
 рактика
проектирования нерекурсивных цифровых
фильтров базируется, в основном, на
синтезе фильтров низких частот. Все
другие виды фильтров могут быть получены
из фильтров низких частот соответствующим
преобразованием. Так, например, фильтр
высоких частот может быть получен
инверсией фильтра низких частот -
вычислением разности между исходным
сигналом и результатом его фильтрации
низкочастотным НЦФ: y(k)
= s(k)
–
h(n)
s(k-n). Отсюда,
условие инверсии симметричного
низкочастотного фильтра в высокочастотный:
hв(0)
= 1-hн(0),
hв(n)
= -hн(n)
при n0.
Идеальным полосовым фильтром называется
фильтр, имеющий единичную амплитудно-частотную
характеристику в полосе от определенной
нижней частоты н
до определенной верхней частоты в,
и нулевой коэффициент передачи за
пределами этой полосы (для цифровых
фильтров - в главном частотном диапазоне).
рактика
проектирования нерекурсивных цифровых
фильтров базируется, в основном, на
синтезе фильтров низких частот. Все
другие виды фильтров могут быть получены
из фильтров низких частот соответствующим
преобразованием. Так, например, фильтр
высоких частот может быть получен
инверсией фильтра низких частот -
вычислением разности между исходным
сигналом и результатом его фильтрации
низкочастотным НЦФ: y(k)
= s(k)
–
h(n)
s(k-n). Отсюда,
условие инверсии симметричного
низкочастотного фильтра в высокочастотный:
hв(0)
= 1-hн(0),
hв(n)
= -hн(n)
при n0.
Идеальным полосовым фильтром называется
фильтр, имеющий единичную амплитудно-частотную
характеристику в полосе от определенной
нижней частоты н
до определенной верхней частоты в,
и нулевой коэффициент передачи за
пределами этой полосы (для цифровых
фильтров - в главном частотном диапазоне).
Импульсная реакция фильтра (коэффициенты оператора) находится преобразованием Фурье заданной передаточной функции H(). В общем случае:
h(nt)
= (1/2)![]() H()
exp(jnt)
dДля
получения вещественной функции
импульсного отклика фильтра действительная
часть передаточной функции должна быть
четной, а мнимая - нечетной. Для фильтров
с нулевым фазовым сдвигом мнимая часть
передаточной функции должна быть равна
нулю, при этом оператор фильтра
определяется косинусным преобразованием
Фурье:h(nt)=
(1/)
H()
exp(jnt)
dДля
получения вещественной функции
импульсного отклика фильтра действительная
часть передаточной функции должна быть
четной, а мнимая - нечетной. Для фильтров
с нулевым фазовым сдвигом мнимая часть
передаточной функции должна быть равна
нулю, при этом оператор фильтра
определяется косинусным преобразованием
Фурье:h(nt)=
(1/)![]() H()
cos(n/N)
dn
= 0,1,2,...
H()
cos(n/N)
dn
= 0,1,2,...
42 Конечные приближения идеальных фильтров. Применение весовых функций Оператор идеального частотного НЦФ представляет собой бесконечную затухающую числовую последовательность, реализующую заданную передаточную функцию:
H() = h(n) cos n. (7.3.1)
Ограничение окна операторов фильтров. На практике бесконечный ряд (7.3.1) всегда приходится ограничивать определенным числом членов его конечного приближения
H'()
=![]() h(n)
cos n,
h(n)
cos n,
при этом передаточная функция осложняется явлением Гиббса, и появляется переходная зона между полосами пропускания и подавления сигнала . Явление Гиббса формирует первые выбросы передаточной функции на расстоянии /(2(N+1)) от скачков (разрывов первого рода). Если ширину переходной зоны p в первом приближении принять по расстоянию между первыми выбросами по обе стороны от скачка функции H(), то ее значение будет ориентировочно равно /(N+1) =p
Применение весовых функций. Если уровень пульсаций передаточной функции, определяемый явлением Гиббса, не удовлетворяет поставленным задачам фильтрации данных, рекомендуется использование сглаживающих весовых функций. С учетом того, что при применении весовых функций происходит расширение переходных зон примерно в два раза, значение ширины переходной зоны будет равным p = 2/N. Отсюда можно определить минимальное число членов усеченного ряда по заданному размеру переходной зоны:
N = 2/p. (7.3.2)
Выбор весовых функций целесообразно осуществлять по допустимой величине осцилляций усиления сигнала в полосе подавления, т.е. по относительному значению амплитуды первого выброса на передаточных характеристиках весовых функций. Для выбранной весовой функции производится расчет весовых коэффициентов pn, после чего устанавливаются окончательные значения оператора фильтра:
hn = pn h(n). (7.3.3)
Подстановкой коэффициентов (7.3.3) в (7.3.1) рекомендуется произвести построение полученной передаточной характеристики фильтра и непосредственно по ней оценить пригодность фильтра для поставленных задач. Это наглядно видно на примере где применяется весовая функция Гаусса. Передаточная функция Hp() имеет практически такую же крутизну, как и функция H'() при N=100 и практически плоскую вершину в интервале спектра сигнала. При необходимости более точной оценки полученной передаточной функции можно рекомендовать увеличение ее частотного разрешения в 2-4 раза перед выполнением преобразования Фурье, что можно выполнить путем увеличения размеров оператора hn дополнением нулями.