

Компоновочно-кинематические схемы манипуляторов
Система координат |
Кинематическая структура |
Рабочая зона |
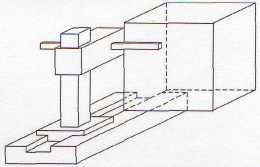
Прямоугольная (декартовая) |
|
|
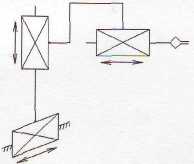
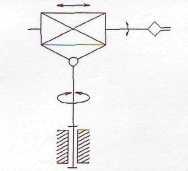
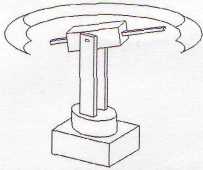
Цилиндрическая |
|
|
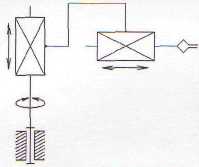
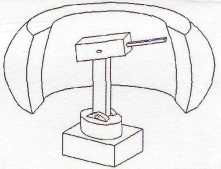
Сферическая |
|
|
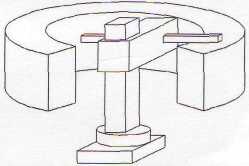
Сферическая ангулярная |
|
|

Одной из важнейших характеристик ПР является система координатных перемещений. Ею определяются кинематические зависимости основных движений и форма рабочей зоны. Основными движениями считают все движения без учета движения захвата детали, ориентирующих движений и дополнительных перемещений основания ПР. В таблице 2 приведены схемы роботов, работающих в разных системах координат. Выбор системы координат осуществляется на первых этапах проектирования ПР.
Наиболее широко используются кинематические цепи, работающие в прямоугольной(декартовой), цилиндрической и сферической системах координат.
В прямоугольной системе координат положение схвата определяется координатами х с, у с, z c .Рабочая зона имеет вид параллелепипеда.
В цилиндрической системе координат положение схвата задают :радиус (выдвижение) руки / - расстояние до оси вращения, поворот руки ц - угол поворота относительно оси, выбранной за начало отсчёта, и поъём руки z - высота точки. Рабочая зона представляет собою цилиндр или в общем случае цилиндрический сегмент. Переход от цилиндрический системы координат к декартовой для точки, характеризующей положение схвата осуществляется по формулам приведения: хс =/cos; yc =/sin; zc =z.
В сферической системе координат обобщёнными координатами могут быть: поворот руки ср , качание руки - угол в и выдвижение руки /.Переход от сферической системы координат к прямоугольной может быть осуществлён по формулам:
хв =1 cos в cos ср ; у с = / cos в sin (р; z с = / sin в
Рабочая зона представляет собой сферический сегмент. Сферическая система координат, реализуемая только вращательными парами называют ангулярной.
З.Основные характеристики роботов
Промышленный робот М20П. Робот имеет грузоподъемность 20 кг, используется для обслуживания станков, роботизированных комплексов. Предназначен для снятия заготовок и деталей, смены инструмента и вспомогательного оборудования при обслуживании станков с ЧПУ.
Таблица 3
Некоторые технические характеристики М20П |
||
1 |
Номинальная грузоподъемность |
20 кг |
2 |
Привод |
Электрический |
3 |
Система управления
|
Позиционная |
4 |
Погрешность позиционирования |
±1,0 |
5 |
Система координат основных движений |
Цилиндрическая |
Рис.2. Внешний вид ПР М20П
1-основание, 2-стойка, 3-направляющие стойки, 4-каретка, 5-рука, 6-монтажный двигатель ротации схвата, 7-схват, 8-пневмоцилиндр уравновешивания.
Рис.3. Кинематическая структура М20П
В лаборатории кафедры ТМ этот навесной робот является частью гибкого производственного модуля для токарной обработки (см. рис. 2). Модуль включает в себя токарный станок с ЧПУ 16К20ФЗРМ, специализированные роботы этого типа предназначены для загрузки и разгрузки станков с ЧПУ токарной группы.
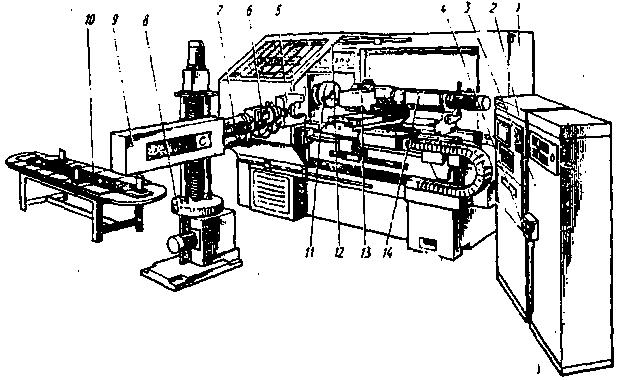
Рис.4. Гибкий производственный модуль.
1 — токарный станок с ЧПУ, 2 - шкаф электроуправления станка, 3 — общее устройство управления ГПМ, 4 -пульт обучения ПР, 5 - схват, 6 - поворотный блок, 7 - шток, 8 - поворотное устройство, 9 -каретка , 10 - тактовый стол, 11 - зажимной патрон, 12 - защитное ограждение, 13 - револьверная головка, 14 - задняя бабка станка
Промышленный робот Электроника НЦ-ТМ-01. Робот относится к сверхлегким, так как его грузоподъемность 10 кг. Он считается специальным, так как предназначен для обслуживания токарных станков с ЧПУ. Манипулятор устанавливается на передней бабке токарного станка. Робот имеет четыре переносные степени подвижности и одну переносную. Перемещения по осям достигают 200-3—мм, угол поворота 120. Особенностью робота является рабочий орган с двумя схватами - при повороте головки на 180 вокруг оси, наклоненной на 45, схваты меняются местами.
Таблица 4
Некоторые технические характеристики ПР «Электроника НЦ-ТМ-01" |
||
1 |
Грузоподъемность |
10 кг |
2 |
Привод |
электрический |
3 |
Система управления |
позиционная |
4 |
Погрешность |
±1 мм |
5 |
Система координат основных движений |
Полярная цилиндрическая |
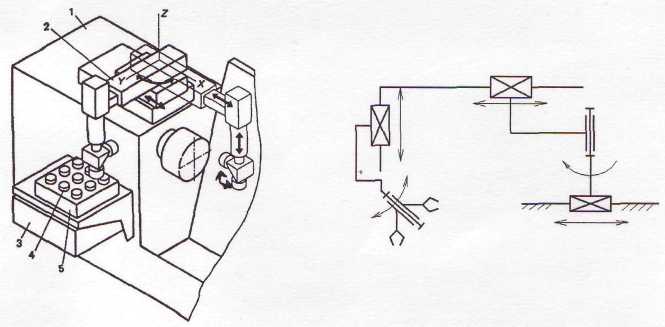
Рис.5. Загрузка заготовок на станке с помощью ПР «ЭлектроникаНЦ-ТМ-01»
1 - передняя бабка станка; 2 - ПР; 3 - тумба под кассету; 4 - заготовки; 5 - кассета с заготовками.
Рис.6.Кинематическая структура ПР «Электроника НЦ- ТМ-01».
Промышленный робот ТУР-10К. Это технологический универсальный робот грузоподъемностью 10 кг и контурной системой управления. Робот универсален в силу того, что может использоваться как обслуживающий так и технологический, то есть выполнять технологические операции, требующие более точного позиционирования руки робота и точного ее перемещения. Робот имеет пять степеней подвижности (три переносные и две ориентирующие), управление позиционное или контурное.
Таблица 5.
Некоторые технические характеристики ПР ТУР-10К |
||
1 |
Номинальная грузоподъемность |
10 кг |
2 |
Привод |
электрический (электромеханический) ическееский) |
3 |
Система управления |
контурная |
4 |
Погрешность позиционирования |
±0,2 мм |
5 |
Система координат основных движений |
сферическая |
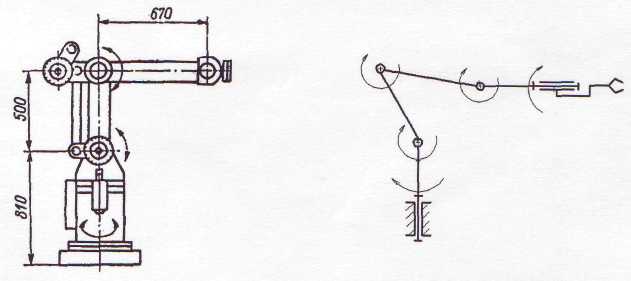
Рис.7. Внешний вид Рис.8. Кинематическая структура
манипулятора ТУР-10К манипулятора ТУР-19К
Промышленный робот М10П. М10П может встраиваться непосредственно в технологическое оборудование (на станине станка). Имеет возможность поворачиваться в двух перпендикулярных плоскостях, производя снятие-установку заготовки и перемещение ее на транспортирующее устройство.
Таблица 6
Некоторые технические характеристики ПР М10П |
||
1 |
Номинальная грузоподъемность |
10 кг |
2 |
Привод |
Пневматический |
3 |
Система управления |
Позиционная |
4 |
Погрешность позиционирования |
±0,5 мм |
5 |
Система координат основных движений |
Полярная сферическая |
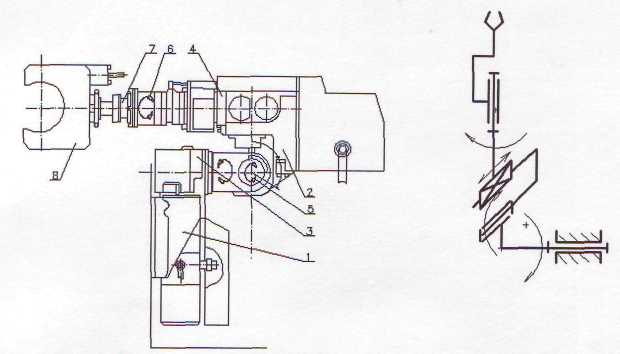
Рис.9. Внешний вид ПР М10П.
1 – основание, 2 – узел механической руки, 3 - механизм поворота руки в вертикальной плоскости,4 –механизм прямолинейного перемещения, 5 – механизм поворота в горизонтальной плоскости, 6 – поворотный
блок кисти руки, 7 – переходная втулка, 8 – схват.
Рис.10. Кинематическая структура M10П.
На рис. 11 показан гибкий производственный модуль кафедры ТМ на основе ПР модели М10П. Робот прикреплен к станине токарного станка с помощью салазок.
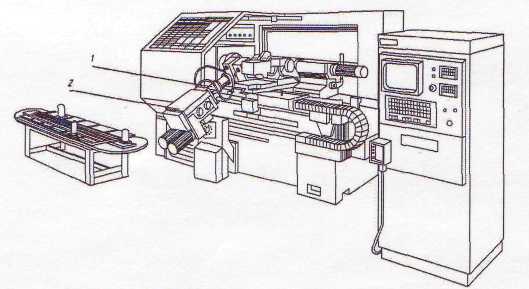
Рис. 11. Гибкий производственный модуль.
1 - корпус, 2 - блок поворота
Автоматический манипулятор АМ-3-1. Манипулятор предназначен для использования в механосборочном, кузнечно-прессовом и заготовительном производствах. С его помощью выполняются вспомогательные операции. Манипулятор приставной, устанавливается в непосредственной близости от технологического оборудования
Некоторые технические характеристики ПР АМ-3-1 |
||
1 |
Номинальная грузоподъемность |
3,2 кг |
2 |
Привод |
пневматический |
3 |
Система управления |
позиционная |
4 |
Погрешность позиционирования |
±1,5 мм |
5 |
Система координат основных движений |
Полярная цилиндрическая |
Таблица 7
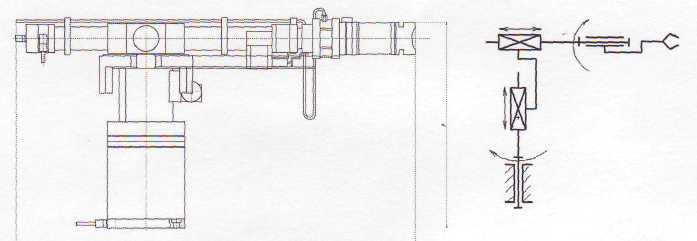
Рис.12. Внешний вид Рис.13,
манипулятора АМ-3-1 Кинематическая
структура АМ-3 -1
Учебный робот "УРТК - 1. Внешний вид робота представлен на рис. 14, персональная система управления реализована на компьютере. Связь робота с компьютером осуществляется через параллельный интерфейс.
Таблица 8
Некоторые технические характеристики УРТК - 1 |
||
1 |
Номинальная грузоподъемность |
0,5 кг |
2 |
Привод |
электрический |
3 |
Система управления |
позиционная |
4 |
Погрешность позиционирования |
±1 мм |
5 |
Система координат основных движений |
декартова |
Манипулятор робота двухпозиционный – имеет схват и режущий инструмент - сверло.
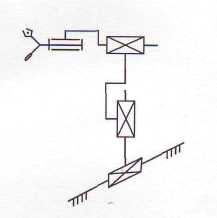
Рис.14. Внешний вид УРТК-1 Рис.15. Кинематическая структура