

8.3Оценка коэффициентов передаточной функции с помощью гармонических входных воздействий
Гармонические входные воздействия описываются выражением:
 , (8.16)
, (8.16)
где
 ,
,
 – амплитуда и частота к-ой гармонической
составляющей (к=1,2….n).
– амплитуда и частота к-ой гармонической
составляющей (к=1,2….n).
Выходной сигнал Х(t) будет представлять сумму частотных составляющих, отличающихся амплитудой и фазой:
 , (8.17)
, (8.17)
где
 – амплитудная частотная характеристика;
– амплитудная частотная характеристика;
 – фазовая частотная
характеристика.
– фазовая частотная
характеристика.
Пусть передаточная функция объекта известна и в общем виде представляет собой отношение многочленов:
 . (8.18)
. (8.18)
Производя замену перейдем к комплексной частотной
характеристике:
перейдем к комплексной частотной
характеристике:
 . (8.19)
. (8.19)
Выделим из этого выражения правую часть:
 . (8.20)
. (8.20)
Отсюда определим действительную и мнимую части числителя:
 . (8.21)
. (8.21)
Сравнив действительную и мнимую части, получим два уравнения:

 (8.22)
(8.22)
Для решения системы
(8.22) необходимо экспериментально
определить вещественную и мнимую части
частотной характеристики объекта
 и
и
 .
.
Подавая на вход
объекта управляющие воздействия
 ,
получим выходные сигналы:
,
получим выходные сигналы:
 . (8.23)
. (8.23)
Тогда вещественную и мнимую части можно определить либо через амплитудную и фазовую частотные характеристики
 ; (8.24)
; (8.24)
 , (8.24)
, (8.24)
либо с помощью фильтра Фурье, реализованного программно в соответствии с выражениями
 ; (8.25)
; (8.25)
 , (8.26)
, (8.26)
гдеТ – время усреднения результатов вычислений.
В результате
экспериментов получим 2n
значений, которые используем в системе
(8.22). Неизвестные коэффициенты
 и
и
 можно определить путем решения n
систем уравнений.
можно определить путем решения n
систем уравнений.
Пример 8.2 Идентификация параметров электромеханической системы по частотным характеристикам
Исходные данные:
1. Передаточная функция объекта:
 .
.
2. Значения постоянных: k = 15, a0 = 0,03, a1 = 0,03.
Решение:
1. Составляем структурную схему исследования математической модели с использованием пакета Simulink в среде MATLAB (рис. 8.8).

Рисунок 8.8 – Схема исследования математической модели в пакете MatLabSimulink
Параметры настройки модели:
– Время моделирования – 0,0 ÷ 10,0 с;
– Амплитуда синусоидального сигнала – 1,0;
– Постоянная составляющая (Bias) – 0,0;
– Частота (Frequency) – 1,0; 5,0; 10,0 с-1;
– Мультиплексор – 2 входа, способ отображения – bar;
Результаты исследований идеальной и реальной переходной характеристики, а также амплитудно-частотной и фазо-частотной характеристик выходного сигнала при различных частотах управляющего сигнала приведены на рис. 8.9–8.11.

Рисунок 8.9 –
Идеальная и реальная переходная,
амплитудно-частотная и фазо-частотная
характеристики выходного сигнала при
частоте

Обработка результатов математического моделирования проводится в следующей последовательности.
Входной сигнал описывается выражением
 ,
,
где
 .
.
Выходной сигнал Х(t):
 .
.
Отношение этих сигналов определяется передаточной функцией объекта:
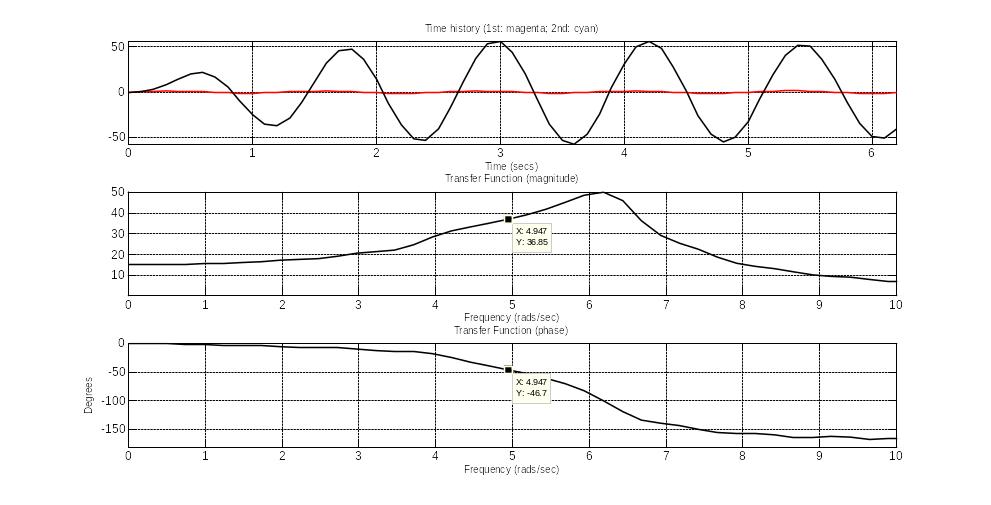
Рисунок 8.10 –
Идеальная и реальная переходная,
амплитудно-частотная и фазо-частотная
характеристики выходного сигнала при
частоте

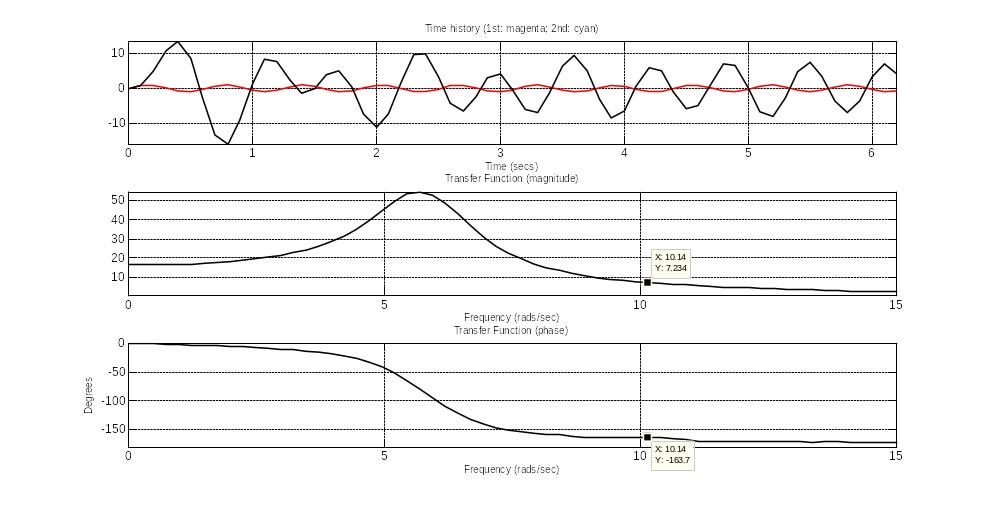
Рисунок 8.11 –
Идеальная и реальная переходная,
амплитудно-частотная и фазо-частотная
характеристики выходного сигнала при
частоте

 .
.
В общем случае передаточная функция при переходе к полярным координатам (амплитудно-фазовой характеристике) описывается отношением комплексных функций числителя (R) и знаменателя (Q) или представляется в комплексной форме следующим образом:
 .
.
Отсюда числитель:
 .
.
После группирования вещественной и мнимой составляющих получим:


Из графиков на рис. 8.9–8.11 определяем:
1. 1= 1 с-1, А1=15.13, 1= –3,089;
2. 2= 5 с-1, А2=36.85, 2= –46.7;
3. 3= 10 с-1, А3=7,234, 3= –163,7.
Определяем вещественные и мнимые характеристики объекта в этих точках:
1. 1= 1 с-1:
 ,
,
 .
.
2. 2= 5 с-1:
 ,
,
 .
.
3. 3= 10 с-1:
 ,
,
 .
.
Определяем вещественные и мнимые характеристики числителя и знаменателя АФХ объекта:
 .
.
Здесь:
Составляем систему уравнений для каждого из трех экспериментальных результатов:
w1= 1 с-1:

w2= 5 с-1:

w3= 10 с-1:

С применением пакета MathCad определяем решение системы уравнений при w1= 1 с-1 и w3= 10 с-1 относительно k, а0, а1:
Для построения амплитудно-фазовой частотной характеристики (см. рис. 8.12) в командном окне среды MatLab воспользуемся командой nyquist(sys), а именно
H=tf([15],[0.03 0.03 1])
nyquist(H)
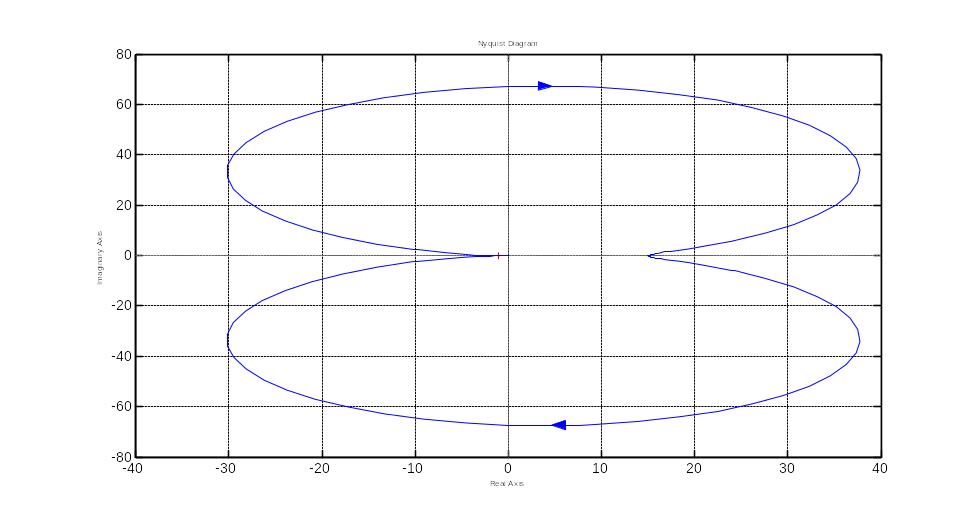
Рисунок 8.12 – Амплитудно-фазовая частотная характеристика математической модели