

4.Динамика
1. Задачей динамического исследования механизма является изучение…
1) движения механизма без учета сил инерции
2) движения звеньев механизма без учета всех действующих сил
3) точности изготовления и сборки механизма
4) движения звеньев механизма с учетом всех действующих сил
2. Работа движущих сил всегда…
1) положительна
2) отрицательна
3) равна нулю
4) может быть положительной и отрицательной
3. Работа сил сопротивления всегда…
1) положительна
2) отрицательна
3) равна нулю
4) может быть положительной и отрицательной
4. Полезное сопротивление – это…
1) движущая сила, приложенная к ведущему звену
2) сила трения, развивающаяся в кинематической паре
3) усилие, для преодоления которого предназначен механизм
4) динамическая реакция ускоряемой массы на ускоряющую
5. Вектор характеризуется показателями…
1) величиной и направлением
2) величиной и точкой приложения
3) величиной, направлением и точкой приложения
4) направлением и точкой приложения
6. Модуль силы инерции ползуна Fи при его массе m = 32 кг и ускорении a = 300 м/c2 равен…Н.
1) 8500 2) 9100
3) 10600 4) 9600
7. Момент сил инерции шатуна численно и по направлению определяется как…
1) произведение углового ускорения на момент инерции звена со знаком плюс
2) произведение массы звена на ускорение центра масс со знаком плюс
3) произведение массы звена на ускорение центра масс со знаком минус
4) произведение углового ускорения на момент инерции со знаком минус
8. Модуль момента сил инерции шатуна Ми при его моменте инерции Is = 0,32 кг·м2 и угловом ускорении звена ε = 300 c-2 равен…Н·м.
1) 85 2) 91
3) 106 4) 96
9. Сила давления на поршень двигателя внутреннего сгорания в период сгорания рабочей смеси является силой…
1) сопротивления
2) при которой скорость уменьшается
3) движущей
4) не оказывающей никакого воздействия
10. При известном давлении в цилиндре р сила давления на поршень равна…
1) р·d2 2) р·πd2
3) р·πd2/2 4) р ·πd2/4
11. Сила давления в цилиндре (с округлением до цифры, кратной 10) при его диаметре d = 50 мм и давлении p = 2,2 МПа равна…Н.
1) 2160 2) 5400
3) 3240 4) 4320
12. Условию кинетостатической определимости удовлетворяет …
1) любая кинематическая цепь с числом звеньев не более трех
2) любая кинематическая цепь, содержащая только низшие кинематические пары
3) любая группа Ассура
4) любая кинематическая цепь
13. Сила взаимодействия двух звеньев при отсутствии трения
направлена ...
1) по касательной к их поверхности
2) по нормали к их поверхности
3) по направлению вектора ускорения
4) противоположно вектору ускорения
14. Параметры, определяемые при силовом расчете механизма,— это ...
1) движущие силы и моменты
2) силы и моменты полезного сопротивления
3) реакции в кинематических парах и уравновешивающий момент
4) силы тяжести
15. Силовой расчёт механизма начинается с ... звена.
1) начального 2) наиболее удалённого от начального
3) произвольно выбранного 4) ведущего
16. Кинетостатический метод расчёта механизмов основан на учёте сил и моментов ... звеньев.
1) инерции 2) полезного сопротивления
3) трения 4) тяжести
17. Сила, приложенная к начальному звену и являющаяся эквивалентом всех сил и моментов сил, называется…
1) уравновешивающей 2) движущей
3) полезного сопротивления 4) приведенной
18. Мощность сил сопротивления Рc в технологической машине при известном уравновешивающем моменте Му (уравновешивающей силе Fу ) определяется по формуле…
1) Муε1 2) Fуω1
3) Муω1 4) Fуε1
19. Мощность движущих сил в двигателе Рд при известном уравновеши-вающем моменте Му (уравновешивающей силе Fу ) определяется
по формуле…
1) Fуε1 2) Fуω1
3) Муω1 4) Муε1
20. Мощность P на ползуне, движущемся со скоростью = 6 м/с, при действии на него силы F = 1200 Н равна…Вт.
1) 7200 2) 7800
3) 7500 4) 6900
21. Мощность P на кривошипе, вращающемся с угловой скоростью ω = 24 с-1, при действии на него момента М = 200 Н·м равна…Вт.
1) 4200 2) 4800
3) 4500 4) 4900
22. Реакция во вращательной кинематической паре раскладывается на составляющие…
1) нормальную и тангенциальную 2) осевую и радиальную
3) тангенциальную и осевую 4) нормальную и осевую
23. Реакция в поступательной кинематической паре…
1) параллельна направлению её движения
2) перпендикулярна направлению её движения
3) направлена под углом 450 к направлению ее движения
4) направлена под углом в зависимости от составляющих
24. Мощность сил трения в поступательной паре определяется по формуле…
1)
![]() 2)
2)
![]()
3)
![]() 4)
4)
![]()
25. Мощность сил трения в поступательной паре Рп при реакции
Rп = 1200 Н, коэффициенте трения f = 0,1 и относительной скорости r = 5 м/с равна…Вт.
1) 450 2) 300
3) 600 4) 720
26. Мощность сил трения во вращательной паре определяется по формуле…
1) 2)
3) 4)
27. Мощность сил трения во вращательной паре Рп при реакции Rп = 1500 Н, коэффициенте трения f = 0,1, относительной угловой скорости ωr = 24 с-1 и радиусе шарнира r = 0,02 м равна…Вт.
1) 81 2) 72
3) 45 4) 56
28. Уравновешивающую силу можно определить с помощью метода (рычага) Жуковского из уравнения: …
1)
![]() (сумма моментов всех сил относительно
полюса плана скоростей равна нулю)
(сумма моментов всех сил относительно
полюса плана скоростей равна нулю)
2)
![]() (сумма всех сил равна нулю)
(сумма всех сил равна нулю)
3)
![]() (векторная сумма всех сил равна нулю)
(векторная сумма всех сил равна нулю)
4)
![]() (векторная сумма всех сил инерции равна
нулю)
(векторная сумма всех сил инерции равна
нулю)
29. Установившимся движением механизма называется …
1) движение, при котором направление угловой скорости начального звена механизма не меняется
2) движение, при котором кинетическая энергия механизма возрастает
3) движение, при котором кинетическая энергия механизма убывает
4) движение, при котором кинетическая энергия механизма постоянна или является периодической функцией времени
30. Колебания скоростей механизма, при которых скорости всех звеньев механизма имеют определенные циклы, называют ...
1) закономерными 2) цикличными
3) регулируемыми 4) установившимися
31. Скорость главного вала (начального звена, звена приведения) при установившемся режиме движения машинного агрегата ...
1) меняется периодически 2) достигает минимального значения
3) остается постоянной 4) достигает максимального значения
32. Режимом выбега механизма называется…
1) переходное движение между установившимся движением механизма и покоем
2) движение, при котором кинетическая энергия механизма постоянна или является периодической функцией времени
3) переходное движение между покоем и установившимся движением механизма
4) движение, при котором направление угловой скорости начального звена механизма не меняется
33. Уравнения, устанавливающие взаимосвязь между кинематическими характеристиками движения звеньев механизма, приложенными к ним силами, размерами, массами и моментами инерции звеньев называются ...
1) уравнениями замкнутого векторного контура
2) уравнениями движения механизма
3) уравнениями Лагранжа
4) уравнениями Даламбера
34. Вариант энергетической характеристики режима движения механизма «разгон»…
1)
![]() 2)
2)
![]()
3)
![]() 4)
4)
![]()
35. Вариант энергетической характеристики режима движения механизма «установившееся движение»…
1) 2)
3) 4)
36. Вариант энергетической характеристики режима движения механизма «выбег»…
1) 2)
3) 4)
37. Изменение кинетической энергии равно нулю на режиме движения механизма…
1) разгоне 2) установившемся
3) выбеге 4) любом
38. Вариант формулы кинетической энергии звена, вращающегося относительно неподвижной оси…
1)
![]() 2)
2)
![]()
3)
![]() 4)
4)
![]()
39. Кинетическая знергия Т кривошипа, имеющего момент инерции IS1 = 0,05 кг·м2, вращающегося с угловой скоростью ω1 = 40 с-1 равна…Дж.
1) 80 2) 40
3) 100 4) 60
40. Вариант формулы кинетической энергии Т звена, перемещающегося поступательно…
1) 2)
3) 4)
41. Кинетическая знергия Т ползуна, имеющего массу m1 = 3 кг, движущегося со скоростью = 2 м/с, равна…Дж.
1) 20 2) 8
3) 10 4) 6
42. Вариант формулы кинетической энергии Т звена, совершающегося общий случай движения…
1) 2)
3) 4)
43. Кинетическая знергия Т шатуна, имеющего момент инерции IS2 = 0,05 кг·м2, вращающегося с угловой скоростью ω2 = 32 с-1 , имеющего массу m2 = 5 кг, при скорости центра масс S2 = 2 м/с, равна…Дж.
1) 42,3 2) 17,8
3) 24,6 4) 35,6
44. Основная причина динамических нагрузок в машинах – это непостоянство…
1) масс звеньев 2) моментов инерции звеньев
3) линейных и угловых скоростей 4) линейных и угловых ускорений
45. Звеном приведения может быть…
1) только кривошип 2) только ползун
3) только шатун 4) любое звено механизма
46. Приведенной массой механизма с одной степенью свободы называется…
1) масса, которую надо сосредоточить в данной точке механизма (точке приведения) и равная суммарной массе всех звеньев механизма
2) масса, которую надо сосредоточить в данной точке механизма (точке приведения) и равная суммарной массе всех подвижных звеньев механизма
3) масса, которую надо сосредоточить в данной точке механизма (точке приведения), чтобы кинетическая энергия этой материальной точки равнялась сумме кинетических энергий всех звеньев механизма
4) масса, которую надо сосредоточить в данной точке механизма (точке приведения) и равная сумме масс и моментов инерции всех подвижных звеньев механизма
47. Приведенным моментом инерции механизма с одной степенью свободы называется…
1) момент инерции, который надо сосредоточить на звене приведения и равный сумме моментов инерции вращающихся звеньев механизма
2) момент инерции, который надо сосредоточить на звене приведения и равный сумме моментов инерции всех звеньев механизма
3) момент инерции, который надо сосредоточить на звене приведения, чтобы кинетическая энергия этого звена равнялась сумме кинетических энергий всех звеньев механизма
4) момент инерции, который надо сосредоточить на звене приведения и равный сумме масс и моментов инерции всех подвижных звеньев механизма
48. Приведенной силой механизма с одной степенью свободы
называется…
1) сила, которую надо сосредоточить в данной точке механизма (точке приведения) и равная сумме всех сил, действующих на звенья механизма
2) сила, которую надо сосредоточить в данной точке механизма (точке приведения) и равная сумме всех сил, действующих на все звенья механизма
3) сила, которую надо сосредоточить в данной точке механизма (точке приведения), чтобы мощность этой материальной точки равнялась сумме мощностей всех звеньев механизма
4) сила, которую надо сосредоточить в данной точке механизма (точке приведения) и равная сумме всех сил и моментов сил, действующих на звенья механизма
49. Приведенным моментом сил механизма с одной степенью свободы называется…
1) момент сил, который надо сосредоточить на звене приведения и равный сумме моментов сил вращающихся звеньев механизма
2) момент сил, который надо сосредоточить на звене приведения и равный сумме сил звеньев механизма
3) момент сил, который надо сосредоточить на звене, чтобы мощность этого звена равнялась сумме мощностей всех звеньев механизма
4) момент сил, который надо сосредоточить на звене приведения и равный сумме сил и моментов сил звеньев механизма
50. КПД механической передачи можно определить через отношения …
1) Твых / Твх 2) Рвх / Рвых
3) Рвых / Рвх 4) Твх / Твых
51. КПД механической передачи при Рвх = 25 кВт и Рвых = 23 кВт равно…
1) 0,90 2) 0,97
3) 0,95 4) 0,92
52. Общий КПД многоступенчатого последовательного привода равен…

1) среднему квадратичному КПД всех ступеней
2) сумме КПД всех ступеней
3) среднему значению КПД всех ступеней
4) произведению КПД всех ступеней
53. Общий КПД механического привода, состоящего из трёх последова-тельно расположенных механизмов, при КПД каждого η = 0,94 равен…
1) 0,80 2) 0,87
3) 0,83 4) 0,90
54. Механизмы 1, 2, 3 с КПД η1 = η2 = η3 = η соединены параллельно. Нагрузка между механизмами распределена поровну. Общий КПД системы механизмов ηобщ определяется по формуле…
1) η/3 2) 3η
3) η3 4) η

55. КПД реального механизма всегда…
1) равен 1 2) больше 1
3) меньше 1 4) может иметь любое значение
56. Коэффициент неравномерности определяется по формуле…
1)
![]() 2)
2)
![]()
3)
![]() 4)
4)
![]()
57. Ротором в теории уравновешивания называется …
1) любое тело, совершающее плоскопараллельное движение
2) любое тело, совершающее поступательное движение
3) любое тело, совершающее вращательное движение
4) любое тело с противовесами
58. Маховиком называется …
1) любая деталь механизма, имеющая цилиндрическую форму
2) звено механизма, совершающее вращательное движение
3) ротор, предназначенный для полного устранения неравномерности вращения главного вала
4) ротор, предназначенный для обеспечения заданного коэффициента неравномерности движения и накопления или отдачи кинетической энергии
59. Основной параметр маховика - …
1) масса
2) центробежная сила инерции
3) наружный размер
4) момент инерции относительно оси вращения
60. Момент инерции маховика по методу Мерцалова определяют…
1) по разности полного приращения кинетической энергии и приращения кинетической энергии всех звеньев, кроме начального
2) по полному приращению кинетической энергии
3) по приращению кинетической энергии всех звеньев, кроме начального
4) по приведенному моменту инерции
61. Уравнение для расчета момента инерции маховика Iм...
1) ΔТ1/(ω12·δ) 2) ΔТ/(ω12·δ)
3) ΔТII/(ω12·δ) 4) ΔТ1/(2ω12·δ)
62. Размеры и массу маховика уменьшают, ...
1) устанавливая маховик на более быстроходный вал
2) устанавливая маховик на тихоходный вал
3) повышая угловую скорость вращения звена приведения
4) понижая угловую скорость вращения звена приведения
63. Неуравновешенность ротора вызывает ...
1) повышение динамических нагрузок на опоры
2) неравномерность вращения главного вала
3) уменьшение угловой скорости вращения главного вала
4) увеличение угловой скорости вращения главного вала
64. Статическим уравновешиванием масс механизма называется …
1) распределение масс звеньев, при котором главный момент сил инерции, действующий на стойку, равен нулю
2) распределение масс звеньев, при котором главный вектор сил инерции, действующий на стойку, равен нулю
3) распределение масс звеньев, при котором главный вектор и главный момент сил инерции, действующих на стойку, равны нулю
4) распределение масс звеньев, при котором центры масс подвижных звеньев совпадают с их геометрическими центрами
65. Статической балансировке подвергаются звенья типа…
1) роторов 2) дисков
3) валов 4) муфт
66. Центр масс системы подвижных звеньев при статической уравновешенности механизмов должен быть ...
1) неподвижен 2) уравновешен
3) приложен к стойке 4) приложен к начальному звену
67. Статического уравновешивания звеньев достигают, используя ...
1) противовесы 2) пружины
3) маховики 4) изменение скорости вращения
68. Моментным уравновешиванием масс механизма называется …
1) распределение масс звеньев, при котором главный момент сил инерции, действующий на стойку, равен нулю
2) распределение масс звеньев, при котором главный вектор сил инерции, действующий на стойку, равен нулю
3) распределение масс звеньев, при котором главный вектор и главный момент сил инерции, действующих на стойку, равны нулю
4) распределение масс звеньев, при котором центры масс подвижных звеньев совпадают с их геометрическими центрами
69. Динамической балансировке подвергаются звенья типа…
1) шкивов 2) валов
3) зубчатых колёс 4) маховиков
70. Сбалансированный ротор при изменении угловой скорости начального звена…
1) остается уравновешенным
2) перестаёт быть уравновешенным
3) меняет положение центра масс
4) изменяет динамическое воздействие на стойку
71. Модули главного
вектора ![]() и
главного момента
и
главного момента ![]() сил
инерции ползуна 3 кривошипно-ползунного
механизма (см. рисунок) определяются
зависимостями …
сил
инерции ползуна 3 кривошипно-ползунного
механизма (см. рисунок) определяются
зависимостями …
(IS3– момент инерции ползуна 3 относительно оси, проходящей через центр масс S3 перпендикулярно плоскости чертежа; m3 – масса ползуна 3; угловая скорость кривошипа 1 постоянна, ω1 = const )

1) Fи = 0; Ми = 0 2) Fи = m3·aS3 ; Ми = IS3· S3
3) Fи = m3·aS3 ; Ми = 0 4) Fи = m3·S3 ; Ми = 0
72. На рисунке приведена кинематическая схема шарнирного четы-рёхзвенного механизма (1 – кривошип; 3 – коромысло). В крайних положениях механизма должны выполняться зависимости …
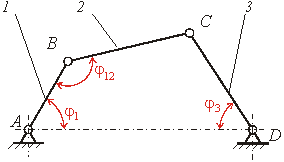
1) φ12 = 0; φ12 = π 2) φ3 = 0; φ3 = π
3) φ1 = π/2; φ1 = 3π/2 4) φ1 = 0; φ1 = π
73. Кинематическим синтезом называется…
1) определение параметров схемы механизма по заданным динамическим свойствам
2) определение структуры механизма
3) определение проворачиваемости звеньев
4) определение параметров схемы механизма по заданным кинематическим свойствам
74. Ограничения на свойства механизма, не отражающие основное назна-чение механизма, называются…
1) параметрами синтеза
2) целевыми функциями
3) дополнительными условиями синтеза
4) основными условиями синтеза
75. Если самое короткое звено – стойка, то шарнирный четырёхзвенник называется…
1) кривошипно-коромысловым
2) двухкривошипным
3) двухкоромысловым
4) шарнирный паралеллограм
76. Если самое короткое звено – кривошип, то шарнирный четырёхзвен-ник называется…
1) кривошипно-коромысловым
2) двухкривошипным
3) двухкоромысловым
4) шарнирный паралеллограм
77. Если самое короткое звено – шатун, то шарнирный четырёхзвенник называется…
1) кривошипно-коромысловым
2) двухкривошипным
3) двухкоромысловым
4) шарнирным паралеллограмом
78. Отношение средних скоростей выходного звена за время его движения в обратном и прямом направлениях называется …
1) коэффициентом динамичности
2) коэффициентом изменения средней скорости выходного звена
3) коэффициентом жёсткости
4) коэффициентом неравномерности движения механизма
79. Угол давления в кинематических парах является…
1) целевой функцией
2) дополнительным условием синтеза
3) основным условием синтеза
4) этапом синтеза
80. Углом давления в кинематических парах называется угол между…
1) направлением скорости и ускорения
2) направлением силы и перемещения
3) направлением силы и ускорения
4) направлением силы и скорости