

3. Теорема об изменении кинетической энергии
В соответствии со сказанным выше, составляем расчетную схему, показанную на рис. 6. Здесь кинематическая схема дополнена лишь активными силами, так как реакции связей не совершают работу при движении системы (реакции связей не показаны).

Рис.6. Силовая схема для использования теоремы
об изменении кинетической энергии
Определим кинетическую энергию системы:
 (14)
(14)
Используя уравнения кинематических связей (см.2-ю графу таблицы), представим кинетическую энергию системы в виде
 (15)
(15)
или
![]()
где
![]() - сумма, стоящая в скобках и представляющая
собой постоянный коэффициент, который
зависит от собственных свойств системы
и не зависит от скорости движения.
- сумма, стоящая в скобках и представляющая
собой постоянный коэффициент, который
зависит от собственных свойств системы
и не зависит от скорости движения.
Работа активных сил при переходе системы из исходного состояния в текущее равна:
![]() .
.
Воспользовавшись уравнениями кинематических связей (см. таблицу), находим
![]() (16)
(16)
или
![]() ,
,
где
![]() - сумма, стоящая в скобках, в данном
случае представляет собой постоянный
коэффициент. Подставляя выражения Т и
А
(I5)
и (16) в соотношение (12), имеем
- сумма, стоящая в скобках, в данном
случае представляет собой постоянный
коэффициент. Подставляя выражения Т и
А
(I5)
и (16) в соотношение (12), имеем
![]()
откуда
 (3.17)
(3.17)
Интегрирование уравнения (17) и определение законов движения звеньев механизма выполняется в том же порядке, как это сделано в разделе 2.
4. Метод кинетостатики
Прежде всего, нужно мысленно устранить внешние и внутренние связи в механизме и заменить их соответствующими реакциями. Далее составить силовые расчетные схемы для каждого твердого тела, указав на них не только активные силы и реакции связей, но и силы инерции. На основании этих расчетных схем составим условия равновесия для всех звеньев механизма. Колесо А движется плоскопараллельно (рис.7), дополнительно прикладываем к нему силу инерции
![]()
и пару сил инерции с моментом
![]()
Составляем условия равновесия:
![]() ,
(18)
,
(18)
![]() ,
(19)
,
(19)
![]() .
(20)
.
(20)
Блок 0 вращается вокруг неподвижной оси (рис.8), проходящей через центр масс; дополнительно прикладываем к нему пару сил инерции с моментом
 .
.
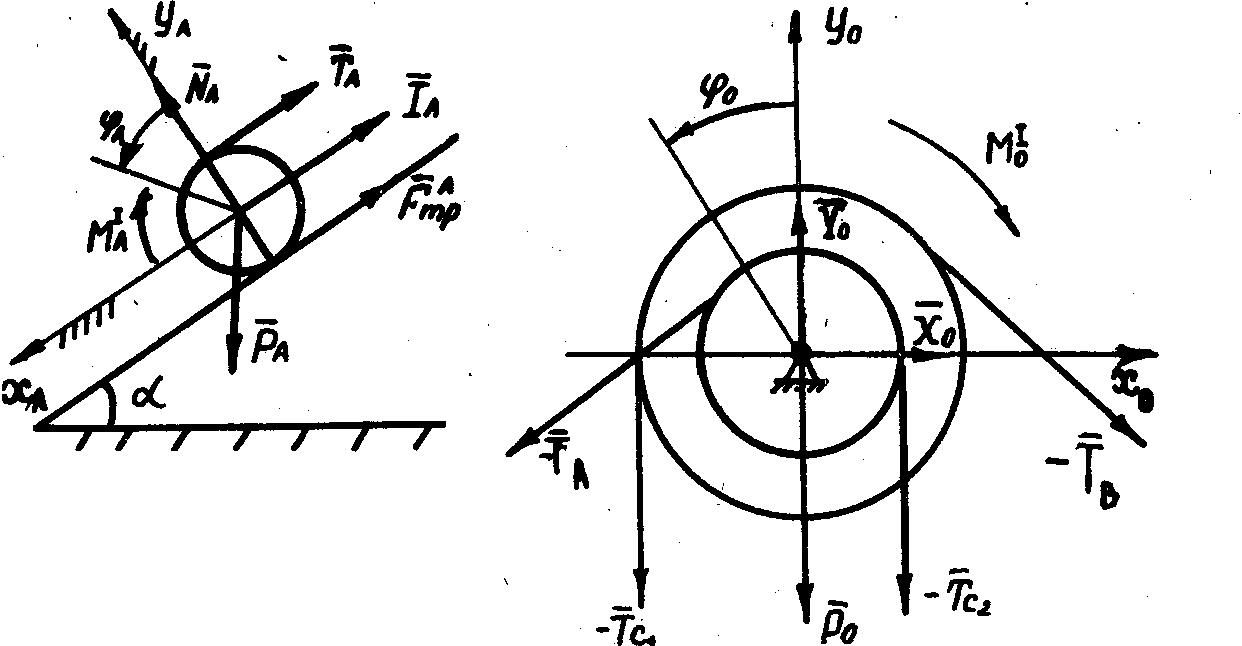 Рис.7.
Расчетная схема тела А Рис.8. Расчетная
схема блока О
Рис.7.
Расчетная схема тела А Рис.8. Расчетная
схема блока О
для метода кинетостатики для метода кинетостатики
Составляем условия равновесия:
![]() (21)
(21)
![]() (22)
(22)
![]() (23)
(23)
Блок С движется плоскопараллельно (рис.9); дополнительно прикладываем к нему силу инерции
![]()
и пару сил инерции с моментом
![]() .
.
Составляем условия равновесия:
![]() , (24)
, (24)
![]() . (25)
. (25)
Тело В движется поступательно (рис.10); дополнительно прикладываем к нему силу инерции
![]()
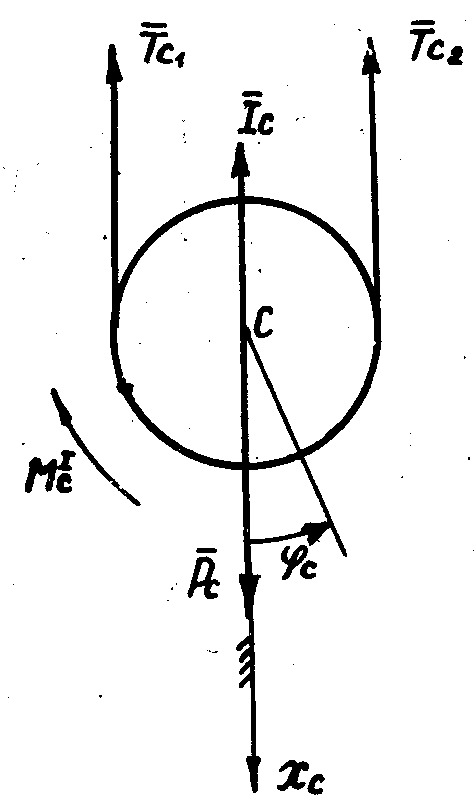
Рис.9. Расчетная схема блока С для метода кинетостатики.

Рис.10. Расчетная схема тела В для метода кинетостатики.
Условия равновесия для тела В:
![]() ,
(26)
,
(26)
![]() (27)
(27)
Подставляя
в уравнения равновесия (18) -(27) значения
сил и моментов сил инерции и дополняя
их уравнениями связей (см.таблицу),
приходим к системе 15 уравнений, куда,
кроме прежних 11 неизвестных
![]() ,
входят еще четыре неизвестных
,
входят еще четыре неизвестных
![]() :
:

Решая систему (28) относительно неизвестных, в первую очередь найдем ускорение центра колеса А:
а остальные неизвестные выражаем через :

Этим заканчивается расчет с помощью метода кинетостатики.