

2 Статичні показники та механічна характеистика електроприводу
2.1 Природня механічна характеристика
 Привід
підйому мостового крану НК 1090 А реалізован
за допомогою електродвигину змінного
струму з фазним ротором 4МТМ225М6 з
наступними параметрами:
Привід
підйому мостового крану НК 1090 А реалізован
за допомогою електродвигину змінного
струму з фазним ротором 4МТМ225М6 з
наступними параметрами:
Номінальна потужність Рн=37 кВт, номінальна частота nн=955 об/хв., кратність пускового моменту λ=3.0, номінальний момент Мн=370 Нм, момент інерції ротора Jр=0.768 Н м с2.
Для побудови механічної характеристики розрахуємо наступні величини:
Максимальний момент
 .
.
Номінальне ковзання
Критичне ковзання

Механічна характеристика будується у відповідності до формули Клосса

 Розрахунок
проводиться за допомогою математичного
пакету Mathcad.
Розрахунок
проводиться за допомогою математичного
пакету Mathcad.
На рисунку 3 представлена механічна характеристика двигуну
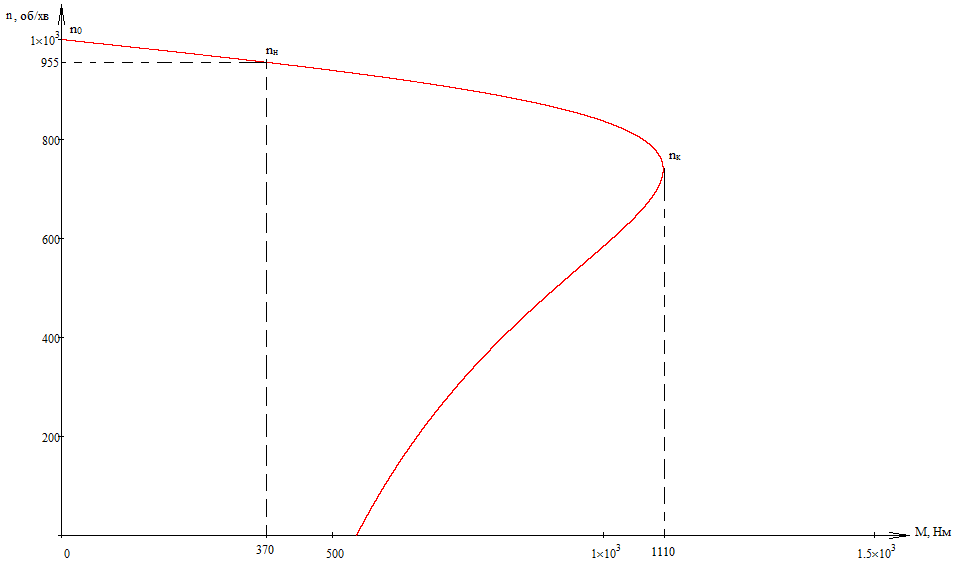
Рисунок 3 - Механічна характеристика
У відповідності до механічною характеристики визначимо її жорсткість.
 .
.
Де dМ – прирощення моменту, що відповідно до характеристики (рисунок 3) дорівнює
 370-0=370
370-0=370
dω - прирощення швидкості
dω=ω0 –ωн=104.7-100=4.7
 .
.
2.2 Механічні характеристики привода з тиристорним регулятором швидкості.
 Для
анализу розрахунку механічних
характеристик скористаємося наступною
формулою
Для
анализу розрахунку механічних
характеристик скористаємося наступною
формулою
 .
.
Де r1 та x1 – активний та реактивний опори статора;
r'2 та x'2 – приведені активний та реактивний опори ротора;
U – напруга живлення;
s – ковзання;
ω0 – синхронна швидкість.
Дросильна характеристика утворюється введенням індуктивностей в коло ротора та регулюванням встановленого потенціометра.
Результат перемикання швидкостей наведено на рисунку 3.

 Рисунок
3 – механічна характеристика дросильного
електропривода з регулятором
Рисунок
3 – механічна характеристика дросильного
електропривода з регулятором
1 – природня механічна характеристика;
2 – природня дросильна характеристика;
3, 4, 5 – штучні дросильні характеристики.
3 Функціональна та структурна схеми електроприводу
3.1 Функціональна схема
 У
системі керування використовується
релейно-контакторна система модернізована
за допомогою заміни ящиків опорів на
тиристорний регулятор швидкості
дросельного приводу. За рахунок чого
дещо покращується жорсткість механічної
характеристики, діапазон та плавність
регулювання електроприводу.
У
системі керування використовується
релейно-контакторна система модернізована
за допомогою заміни ящиків опорів на
тиристорний регулятор швидкості
дросельного приводу. За рахунок чого
дещо покращується жорсткість механічної
характеристики, діапазон та плавність
регулювання електроприводу.
Функціональна схема наведена на рисунку 4

Рисунок 4 – Функціональна схема електроприводу з тиристорним регулятором швидкості
 де
БС – силовий блок. Вузел тиристорів,
подключаеєий до кола дроселів роторного
кола асинхронного двигуна;
де
БС – силовий блок. Вузел тиристорів,
подключаеєий до кола дроселів роторного
кола асинхронного двигуна;
ПУ- панель управління. В склад якої входять:
1. Трансформатор блоку живлення T1;
2. Три трансформатори СІФУ (по числу силових тиристорів);
3. Три трансформатори зворотного зв’язку, що забезпечують зв’язок по напрузі на кільцях ротору;
4. Система імпульсно-фазового управління (СІФУ), що має в своєму складі три однакових вузла керування тиристорами;
5. Вузел керування, забезпечуючи завдання швидкості двигуну.
На рисунку 4 приведена функціональна схема дросельного електроприводу з тиристорним регулятором швидкості.
Контактори КМ1 та КМ2 під'єднують обмотки статора до мережі та забезпечують реверс двигуну. Вмикання контакторів здіснюються командоапаратом КА. В роторне коло вмикається вузел тиристорів БС, призначений для регулювання струму роторного кола асинхронного електродвигуна. При закритих тиристорах роімкнені кінці обмоток дросилей L1,L2,L3, струми в роторних колах не протікають. При вмиканні тиристорів поєднуються кінці обмоток дроселя, збираеться схема зірки, в колі ротора протікаэ струм.
Якщо відкривається тиристори в мить переходу струму ротора через нуль від негативного значення до позитивного, утворюється схема, в якій тиристори не впливають на природній процес протікання струму ротора під впливом позитивної напруги. В цьому режимі забезпечується природня дросельна характеристика асинхронного електродвигуна, коли кінці обмоток дроселів замкнуті накоротко.
Регулювання середнього значення струму ротора здійснюються за рахунок затримки часу відкриття тиристора відносно напруги на тиристорі. Тиристор відчиняється не вмить переходу напруги на ньому через нуль, а
 пізніше,
в необхідний момент часу на протязі
полуперіода позитивнї напруги на ньому.
Діапазон регулювання струму ротора –
від нуля, коли тиристори закриті, до
значення струму на природній дросельній
характеристиці, коли тиристори повністю
відкриті.
пізніше,
в необхідний момент часу на протязі
полуперіода позитивнї напруги на ньому.
Діапазон регулювання струму ротора –
від нуля, коли тиристори закриті, до
значення струму на природній дросельній
характеристиці, коли тиристори повністю
відкриті.
Силові тиристорі включені в трикутник і кожен з них вмикаються при подачі керуючого імпульсу з СІФУ. Силові контакти під’єднуються до фаз А, В, С кінців пускового дроселя. Блок силовий БС підєднується до панелі управлення ПУ .
Схеми СІФУ всіх трьох фаз ідентичні. СІФУ синхронізирована з напругою на кільцях ротора. Первинні обмотки трансформаторів СІФУ поєднані один з одним послідовно. Послідовно з’єднані Первинні обмотки трансформаторів включені за схемою трикутника аналогічно до підєднуючих керованих ними тиристорів.
Напруга керування кожним тиристором забезпечується:
1. Напругою завдання швидкості двигуна, що знімаються з регульованих потенциометрів «грубе» налаштування понижених швидкостей.
2. Напругою зворотного зв'язку на кільцях ротора, поступаючого з регулюваного потенциометра.
Керуючи імпульси тиристорів формуються в мить проходження через нуль напруги керування кожної фази СІФУ та поступають на підсилювач імпульсів. Підсилювач імпульсів на базі оптотранзистора (полупроводникового реле) під'єднує до керуючого електроду тиристора незалежне джерело живлення в момент часу, необхідний для відкриття тиристора. Кут відкриття тиристора регулюється напругою зворотного зв'язку при зміні навантаження на валу двигуну.
Роботу електронних пристроїв регулятора забезпечує блок живлення кіл керування.
Первинна обмотка трансформатора блока живлення під’єднується до мережі 380 В.
3.2 Структурна схема
На підставі функціональної схеми представимо структурну схему системи керування приводом підйому мостового крана. Схема будується на базі асинхронного двигуну з фазним ротором змінного струму з регулюванням швидкості за ротором.
Структурна схема приводу підйому наведена на рисунку 2.
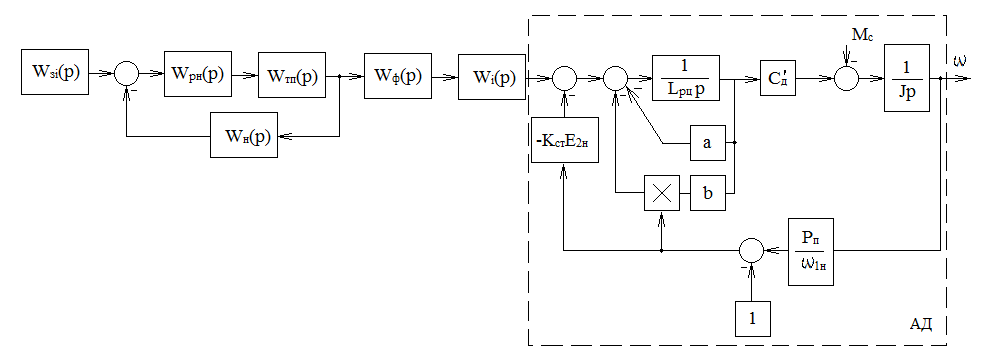
Рисунок 5 – Структурна схема
Де Wзі(р) – передаточна функція задатчика інтенсивності;
Wрн(р) – передаточна функція регулятора напруги;
Wтп(р) – передаточна функція тиристорного перетворювача;
Wф(р) – передаточна функція зглажуючого фільтру;
Wі(р) – передаточна функція інвертору;
Wн(р) – передаточна функція датчика напруги;
АД – модель асинхронного двигуна.