2.3. Частные случаи движения точки
Равномерным называется такое движение, при котором проекция скорости на касательную к траектории постоянна, т.е. V, = const и, следо вательно, ат=0.
Поэтому, а = ап = V 2 / p, т.е. при равномерном криволинейном движении точки полное ускорение равно нормальному. Скорость же при таком движении, оставаясь постоянной по величине, изменяет лишь свое направление. Отсюда следует, что нормальное ускорение характеризует быстроту изменения скорости по направлению.
Движение точки называется переменным, если величина ее скорости изменяется с течением времени. Если при этом величина скорости увеличивается, то движение называется ускоренным, если уменьшается - замедленным. Поскольку точка совершает прямолинейное движение, то в любой точке ее траектории р = оо и, следовательно, ап = 0.
Таким образом, а = ап= V 2 / p т.е. полное ускорение равно тангенциальному. Скорость же при таком движении изменяет лишь свою величину. Отсюда следует, что тангенциальное ускорение характеризует быстроту изменения величины скорости.
При равномерном прямолинейном движении скорость точки не изменяется ни по величине, ни по направлению.
Равнопеременным движение точки называется такое движение, при котором ее тангенциальное ускорение постоянно, т.е. ат = const.
2.4. Динамика поступательного и вращательного движения
Простейшими видами движения твердого тела являются поступательное движение и вращение вокруг неподвижной оси. Под твердым телом в кинематике, как и в статике, понимается абсолютно твердое тело.
Рассмотрим основные свойства и зависимости между кинематическими параметрами поступательного и вращательного движений твердого тела. Заметим, что поступательное или вращательное движение может совершать только твердое тело.
Установим взаимосвязь между кинематическими параметрами вращательного движения твердого тела вокруг неподвижной оси и движения точки, принадлежащей этому телу. Важное значение здесь имеет передача вращательного движения от одного вала машины к другому. В этом разделе мы выведем зависимость между угловыми скоростями двух валов при передаче вращательного движения от одного к другому. Здесь же мы ознакомимся с двумя новыми векторами - с вектором угловой скорости и вектором углового ускорения твердого тела, вращающегося вокруг неподвижной оси. С помощью этих векторов мы выведем векторные формулы скорости и ускорения точки, принадлежащей вращающемуся твердому телу, которые будем впоследствии использовать как в кинематике, так и в динамике.
2.4.1. Поступательное движение твердого тела
а) Определение и классификация поступательного движения
Поступательным движением твердого тела называется такое его движение, при котором любая прямая, неизменно связанная с телом, за все время его движения остается параллельной своему начальному положению. Поступательное движение совершает, например, вагон, движущийся по прямолинейному участку пути.
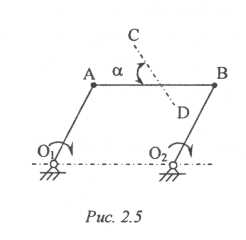
Например, прямолинейное поступательное движение совершает вагон, движущийся по прямолинейному участку пути или поршень, движущийся в цилиндре двигателя. Спарник АВ, показанный на рис. 2.5, совершает криволинейное поступательное движение, так как точки его описывают траектории, например, точки А u В движутся по окружностям одинакового радиуса с центрами в точках О1 и О 2.
Если при поступательном движении твердого тела все его точки перемещаются в плоскостях, параллельных некоторой неподвижной плоскости, то такое движение тела называется плоским поступательным. Плоское поступательное движение совершает, например, спарник, показанный на рис. 2..5, так как все его точки перемещаются в плоскостях, параллельных неподвижной плоскости, проведенной перпендикулярно к осям О1 и О2 вращения кривошипов. Траектории всех точек твердого тела, совершающего плоское поступательное движение, расположены в параллельных плоскостях и, следовательно, представляют собой плоские линии. Понятно, что прямолинейное поступательное движение твердого тела является частным случаем плоского поступательного движения.
Если все точки поступательно движущегося твердого тела описывают пространственные кривые, то такое движение тела называется пространственным поступательным.
б) Теорема о траекториях, скоростях и ускорениях точек твердого тела при поступательном движении
Прежде чем сформулировать эту теорему, напомним о следующих определениях, известных из элементарного курса геометрии.
Определение 1. Две фигуры называются конгруэнтными, если при наложении одной из них на другую они совмещаются всеми своими точками.
Определение 2. Точки двух конгруэнтных фигур, совмещающиеся друг с другом при их наложении, называются соответствующими точками.
Определение 3. Две конгруэнтные фигуры называются смещенными относительно друг друга параллельно, если их соответствующие точки смещены относительно друг друга по параллельным прямым на одинаковые расстояния.
Теперь сформулируем следующую теорему.
Теорема 1. Все точки поступательно движущегося твердого тела описывают конгруэнтные параллельно смещенные траектории и имеют в любой момент равные векторы скорости и равные векторы ускорения.
Пусть некоторое твердое тело (рис. 2.6) совершает поступательное движение относительно системы отсчета O x y z. Возьмем две произвольные
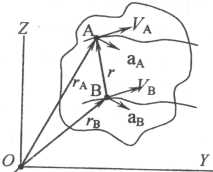
его точки А и В и докажем, что они движутся по конгруэнтным параллельно смещенным траекториям, имея в любой момент времени равные векторы скорости Vа и Vв и равные векторы ускорения аА и аВ , т.е.
V A =VB и аА =а В
Для доказательства проведем в точки А и В радиусы-векторы rА и rв из начала координат О. Проведем также вектор ВА = r. Этот вектор постоянен по величине, так как рассматриваемое тело является абсолютно твердым и, следовательно, расстояние между точками А и В при его движении остается неизменным.
Направление этого вектора также не изменяется, так как, согласно условию, тело движется поступательно, и, поэтому, прямая, проходящая через точки А и В, перемещается параллельно своему начальному положению.
Таким образом, вектор r постоянен, т. е. r = const. (2.7)
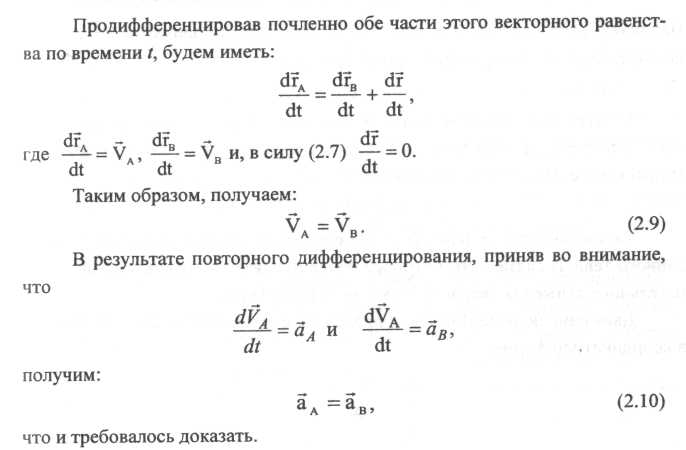
Следовательно, траекторию точки В можно совместить всеми ее точками с соответствующими точками траектории точки А путем параллельного переноса их в направлении вектора r на одинаковые расстояния, равные длине отрезка АВ, чем и доказана первая часть сформулированной теоремы. Из векторного треугольника ОBА замечаем, что гА = гв + г . (2.8)
Движение полюса может быть определено любым из способов, описанных в предыдущей теме: векторным, координатным или естественным.
Например, если принять за полюс точку В (рис. 2.6), то движение его можно определить следующим векторным уравнением:
rB=fB(t) (2.11)
Из векторной зависимости (2.8) замечаем, что векторное уравнение движения любой другой точки данного тела отличается от (2.11) на постоянный вектор. Например, для точки А имеем:
r а=fв(t) (2.12)
Таким образом, уравнение (2.11) определяет движение любой точки данного тела. В связи с этим это уравнение называется уравнением поступательного движения твердого тела в векторной форме.
Движение полюса В можно определить и уравнениями движения в координатной форме:
xB=f 1(t),
yb=f2(t) (2-13)
zB=f 3(t)
Уравнения движения любой другой точки данного тела отличаются от уравнений (2.13) постоянными членами. Например, для точки А будем иметь:
xB=f 1(t) +r x
yb=f2(t)+rx (2-14)
zB=f 3(t)+rz
где rx ry rz проекции на координатные оси постоянной вектора г . Таким образом, уравнения (2.13) определяют движение любой точки данного тела и называются уравнениями поступательного движения твердого тела в координатной форме.
Аналогично, движение полюса В можно определить естественным способом с помощью уравнения: SB=fB(t). (2.15)
Это уравнение называется уравнением поступательного движения твердого тела в естественной форме. Уравнение движения других точек данного тела отличаются от него лишь постоянными членами, которые не оказывают влияние на скорость и ускорение его точек.
2.4.2. Уравнение вращения твердого тела вокруг неподвижной оси
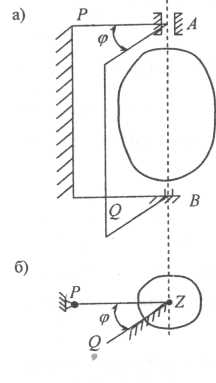
Если две точки А и В (рис. 2.7а) твердого тела закреплены неподвижно, то это тело сможет совершать только такое движение, при котором будут оставаться неподвижными все его точки, лежащие на прямой, проходящей через эти точки.
Эта прямая называется осью вращения. Оси вращения Z, как и всякой другой оси, приписывается определенное направление, считаемое положительным.
Представим себе две полуплоскости Р и Q (рис. 2.7), ограниченные с одной стороны осью вращения Z, первая из которых неизменно связана с некоторой системой отсчета и, следовательно, условно считается неподвижной, а вторая — с вращающимся твердым телом и, поэтому, вместе с ним вращается вокруг оси Z. На рис. 2.7 ось Z перпендикулярна к плоскости чертежа и, следовательно, на нем показаны лишь следы полуплоскостей Р и Q на этой плоскости.
Положение твердого тела однозначно определяется двугранным углом φ, образованным упомянутыми полуплоскостями, если считать его величиной алгебраической. Этот угол называется угловой координатной твердого тела. Его принято считать положительным, если, при взгляде с положительного направления оси вращения, подвижная полуплоскость повернута относительно неподвижной против хода стрелки часов, и отрицательным в противном случае. Не следует смешивать угловую координату твердого тела с углом его поворота.
Последний, как и путь, пройденный точкой, всегда положителен и может только увеличиваться, независимо от направления вращения тела.
Угловая координата, как правило, измеряется в радианах, т.е. является величиной безразмерной, и обозначается буквой φ. Иногда ее измеряют в полных оборотах тела и тогда обозначают буквой N. Поскольку один оборот содержит 2л радиан, то для перехода от одной единицы измерения угловой координаты к другой существует зависимость: φ = 2πN. (2.16)
При вращении твердого тела вокруг неподвижной оси его угловая координата, в общем случае, непрерывно изменяется с течением времени, т. е. является однозначной и, как показано ниже, дважды дифференцируемой функцией времени t, т.е.
φ = f(t). (2.17)
Уравнение такого вида определяет вращательное движение твердого тела и называется уравнением его вращения вокруг неподвижной оси.
2.4.3. Угловая скорость и угловое ускорение твердого тела
Угловая скорость твердого тела, вращающегося вокруг неподвижной оси, характеризует быстроту его вращения вокруг этой оси. Пусть в момент t угловая координата тела равна φ, а в момент tx = t + Δt она равна φ = φ + Δφ. Следовательно, в течение бесконечно малого промежутка времени At тело поворачивается на бесконечно малый угол Δφ. Величина ωср = Δφ / Δt называется средней угловой скоростью тела за промежуток времени Δt. Предел средней угловой скорости при Δt —0 называется угловой скоростью твердого тела в момент t и обозначается ω, т.е. ω =dφ / dt,
Таким образом, угловая скорость твердого тела, вращающегося вокруг неподвижной оси, равна первой производной его угловой координаты по времени.
Поскольку производная - dφ / dt, положительна при возрастании угловой
координаты φ и отрицательна в противном случае, то угловая скорость ω является величиной алгебраической. Она положительна, если тело вращается в сторону положительных угловых координат, т.е. против хода стрелки часов при взгляде с положительного направления оси вращения, и отрицательна, если тело вращается в противоположном направлении.
Если угловую координату измерять в радианах, а время - в секундах, то, учтя, что радиан есть величина безразмерная, получим для угловой скорости ω размерность с' .
Иногда угловую скорость равномерного вращения твердого тела измеряют числом его оборотов в минуту. В этом случае ее обозначают п. Между угловой скоростью ω (с ) и числом п (об/мин) существует зависимость: ω = πn / 30
Число п оборотов тела в минуту часто называют частотой его вращения.
Быстрота изменения угловой скорости характеризуется величиной его углового ускорения.
Пусть в момент t угловая скорость тела равна ω, а в момент t =t + Δt она равна
ω = ω + Δω. Тогда в течение бесконечно малого промежутка времени Δt угловая скорость тела изменяется на бесконечно малую величину Δω. Величина εср = Δω / Δt называется средним угловым ускорением тела за промежуток времени Δt,, а ее предел при Δt —0 — угловым ускорением в момент t и обозначается ε, ε= dω / d t = d 2φ / d 2t =φ
Эта зависимость подтверждает высказанное выше предположение о том, что функция (2.17) должна быть дважды дифференцируемой.
Таким образом, угловое ускорение твердого тела, вращающегося вокруг неподвижной оси, в момент t равно первой производной его угловой скорости по времени или второй производной по времени его угловой координаты.
Угловое ускорение, также как и угловая скорость, является величиной алгебраической. Оно положительно, если угловая скорость увеличивается с течением времени и отрицательно в противном случае. Иными словами, тело совершает ускоренное вращение, если угловая скорость и угловое ускорение имеют одинаковые знаки, и замедленное - если их знаки различны. Измеряется угловое ускорение в с-2.
2.4.5. Плоское движение твердого тела
После ознакомления с кинематикой поступательного и вращательного движений твердого тела можно перейти к изучению кинематики более сложного его движения. Таким движением является плоское движение твердого тела.
П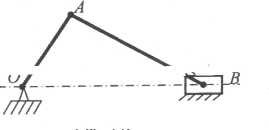 лоским
движением твердого
тела называется такое его движение, при
котором все его точки перемещаются в
плоскостях, параллельных некоторой
неподвижной плоскости, называемой
основной плоскостью. Плоское
движение совершает, например, колесо,
катящееся по прямолинейному
рельсу, или шатун АВ
(рис.
2.8) кривошипно-ползунного
механизма, состоящего
из кривошипа ОА,
вращающегося
лоским
движением твердого
тела называется такое его движение, при
котором все его точки перемещаются в
плоскостях, параллельных некоторой
неподвижной плоскости, называемой
основной плоскостью. Плоское
движение совершает, например, колесо,
катящееся по прямолинейному
рельсу, или шатун АВ
(рис.
2.8) кривошипно-ползунного
механизма, состоящего
из кривошипа ОА,
вращающегося
вокруг неподвижной оси О, перпендикулярной к плоскости чертежа, соединенного ним шарнирно шатуна АВ и ползуна В,
помещенного в горизонтальные направляющие и соединенного шарнирно с шатуном. Вращение твердого тела вокруг неподвижной оси и плоское поступательное движение являются частными случаями плоского движения.
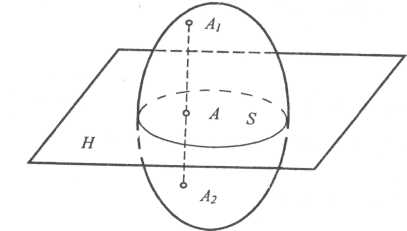
Пусть некоторое твердое тело (рис. 2.9) совершает плоское движение. Понятно, что в этом случае плоская фигура S, образованная в сечении тела основной плоскостью Н (или плоскостью, ей параллельной), за все время движения тела остается в этой плоскости. Прямая AtA2, проходящая через произвольную точку А и фигуры S, перпендикулярная к плоскости Н и неизменно связанная с рассматриваемым телом, за все время движения тела остается перпендикулярной к этой плоскости, т.е. совершает поступательное движение Рис. 2.9. Следовательно, все точки этой прямой совершают одинаковые движения.