

Методика измерений
В данной работе осуществляется экспериментальная проверка основного уравнения динамики вращательного движения с помощью маятника Обербека. Схематическое изображение установки приведено на рис. 8.






![]()





![]()
h

Рис. 8. Схематическое изображение установки и приложения сил
Маятник представляет собой маховик в виде крестовины. По четырем взаимно перпендикулярным стержням могут перемещаться грузы массой m. На общей оси находится шкив, на который наматывается нить с привязанным на её конец грузом. Под действием падающего груза нить разматывается и приводит маховик в равноускоренное вращательное движение, при этом угловое ускорение крестовины:
|
(54) |
где a – ускорение падающего груза; r – радиус шкива.
Пользуясь выражением для равноускоренного движения груза:
|
(55) |
находим
|
(56) |
Подставляя (56) в (54) получаем:
|
(57) |
где h – высота падения груза; t – время падения груза.
Момент силы, приложенной к крестовине, находим по формуле (52), поскольку сила, приложенная к шкиву, перпендикулярна его радиусу, то момент сил, действующих на шкив:
|
|
где r – радиус шкива.
Силу F можно найти из уравнения движения платформы с грузом:
|
(58) |
Тогда для момента силы получим следующее выражение:
|
(59) |
Используя формулу (53) после подстановки в нее углового ускорения из (57) и линейного ускорения из (56) получим расчетную формулу для момента инерции:
|
(60) |
 .
.Получив экспериментальные значения h и t , по формуле (60) определяем значение момента инерции крестовины.
Теоретическое значение момента инерции крестовины:
|
(61) |
где
J0
– суммарный момент инерции двухступенчатого
шкива, оси и бобышки крестовины; 4m1R2 –
момент инерции передвижных грузов
крестовины; R
– расстояние от оси вращения до груза;
m
– масса передвижного груза; l
– длина стержня(от центра крестовины
до груза); m2
– масса стержня без груза;
 – момент инерции стержней крестовины
без грузов.
– момент инерции стержней крестовины
без грузов.
Описание установки
Общий вид маятника приведен на рис. 9. На вертикальной стойке основания 1 крепятся три кронштейна: верхний 2, средний 3, нижний 4.
Положение всех кронштейнов на вертикальной стойке строго зафиксировано. На верхнем кронштейне 2 крепится блок 5 изменения направления движения эластичной нити 6, на которой подвешен крючок 7 с грузом 8. Вращение блока 5 осуществляется в узле подшипников 9, который дает возможность уменьшить трение.
На среднем кронштейне 3 крепится электромагнит 14, который с помощью фрикциона при подаче на него напряжения, удерживает систему с грузами в неподвижном состоянии. На этом же кронштейне расположен узел подшипников 9, на оси которого с одной стороны закреплен двухступенчатый шкив 13, на котором имеется приспособление для закрепления нити 6.
На другом конце оси находится крестовина, представляющая собой 4 металлических стержня с нанесенными на них рисками через каждые 10 мм, закрепленных в бобышке 12 под прямым углом друг к другу.
На каждом стержне могут свободно перемещаться и фиксироваться грузы 11, что дает возможность ступенчатого изменения момента инерции крестовины маятника.
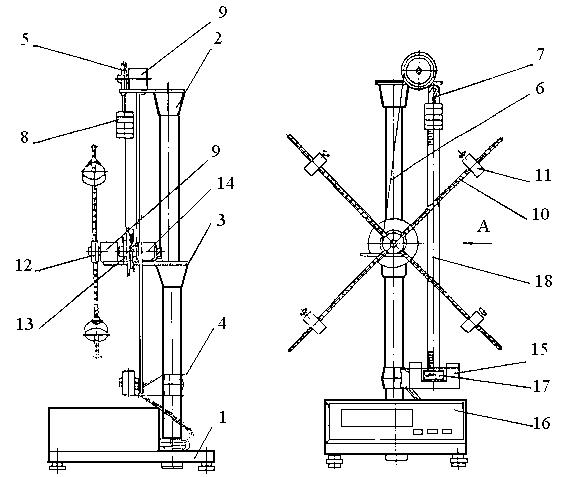
Рис. 9. Общий вид экспериментальной установки
На нижнем кронштейне 4 крепится фотоэлектрический датчик 15, который выдает электрический сигнал на миллисекундомер 16 для окончания счета промежутков времени. На этом же кронштейне крепится резиновый амортизатор 17, о который ударяется груз при остановке.
Маятник снабжен миллиметровой линейкой 18, по которой определяется начальное и конечное положение грузов, а, следовательно, и пройденный путь.
Миллисекундомер физически 16 выполнен самостоятельным прибором с цифровой индикацией времени.