

Рабочий орган
|
|
|
Рис. 6. Затвор дисковый DE16 |

Затвор дисковый de16 запорно-регулирующий с электроисполнительным механизмом мэоф.
Электрифицированные дисковые затворы предназначены для использования в качестве запорно-регулирующих устройств в системах автоматического регулирования технологических процессов и дистанционного управления в системах холодного и горячего водоснабжения, в системах отопления, вентиляции и кондиционирования.
Параметры дискового затвора типа DE16:
Диаметр условного прохода (Ду) — 25-200 мм.
Давление рабочей среды (Рраб)— до 1,6 МПа.
Рабочая среда — горячая и холодная вода, воздух, пар.
Температура рабочей среды (Траб)— -10°С...+130°С.
Степень утечки <0,00001% величины Kvs.
Характеристика регулирования — линейная.
Материал основных деталей:
корпус — чугун;
диск — нержавеющая сталь;
вкладыш — полимерный материал (ЕРДМ).
Параметры электроисполнительного механизма
|
Обозначение механизмов |
Номинальный крутящий момент, N·m |
Номинальное время полного хода выходного вала, s |
Полный номинальный ход выходного вала, r |
Питание, V |
Потребляемая мощность, W |
|
МЭОФ-40/25-0,25К |
40 |
25 |
0,25 |
3 ф.; 380 |
110 |
Рабочее положение механизмов — любое, определенное положением трубопроводной арматуры.
Механизмы изготовляются с одним из следующих блоков сигнализации положения выходного вала:
1. реостатным БСПР,
2. индуктивным БСПИ,
3. токовым БСПТ — с унифицированным сигналом 0-5, 0-20, 4-20 mA по ГОСТ 26.011-80.
Нелинейность датчиков блоков сигнализации положения ±2,5%.
Средний срок службы механизмов не менее 15 лет.
Габаритные и присоединительные размеры затвора дискового запорно-регулирующего DE16 с механизмами МЭОФ
|
Ду,мм |
Применяемые механизмы |
Kvs |
ØD |
C |
H |
ØD2 |
L |
L1 |
L2 |
L3 |
H1 |
H2 |
|
100 |
МЭОФ-40/25-0,25;-40/10-0,25 |
800 |
150 |
167,5 |
281,5 |
90 |
52 |
95 |
235 |
185 |
188 |
521,5 |
Исполнительный механизм с ОС
|
|
|
Рис. 7. МЭОФ в разрезе. |
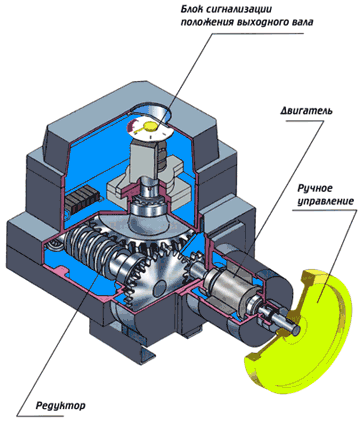
Механизмы МЭОФ предназначены для перемещения рабочих органов запорно-регулирующей трубопроводной арматуры поворотного принципа действия (шаровые и пробковые краны, поворотные дисковые затворы, заслонки и пр.) в системах автоматического регулирования технологическими процессами различных отраслей промышленности в соответствии с командными сигналами, поступающими от регулирующих или управляющих устройств. Механизмы устанавливаются непосредственно на арматуру.
Основные функции:
автоматическое, дистанционное или ручное открытие/закрытие трубопроводной арматуры;
автоматический и дистанционный останов рабочего органа арматуры в любом промежуточном положении;
позиционирование рабочего органа трубопроводной арматуры в любом промежуточном положении;
формирование информационного сигнала о конечных и промежуточных положениях рабочего органа арматуры и динамике его перемещения;
Конструктивными основными деталями нелинейных механизмов являются:
двигатель;
привод ручной;
редуктор;
блок сигнализации положения.
Блок сигнализации положения выходного вала:
Предназначен для преобразования положения выходного вала механизма в пропорциональный электрический сигнал, сигнализации или блокирования в крайних или промежуточных положениях выходного вала.
Механизмы оснащаются одним из видов блока сигнализации положения выходного вала:
реостатным (БСПР-10)
индуктивным (БСПИ-10)
токовым (БСПТ-10)
блоком концевых выключателей БКВ без датчика положения выходного вала.
В состав каждого блока входят два основных узла: блок микропереключателей и датчик. Блок микропереключателей содержит основание, корпус с микропереключателями и вертикальный вал с кулачками. Один из кулачков имеет два профиля по Архимедовой спирали на углах 90° или 0-225° (0-0,25 об. или 0-0,63 об.). При повороте вала кулачки, в зависимости от его положения, нажимают на кнопки микропереключателей. Поворот вала через профильный кулачок на валу вызывает изменение выходного сигнала датчика положения.
Редуктор:
Понижение частоты вращения и увеличение крутящего момента, создаваемых двигателем, осуществляется посредством многоступенчатых цилиндрических зубчатых или комбинированных червячно-зубчатых передач. Валы вращаются на шарикоподшипниках. Зубчатые передачи и шарикоподшипники смазываются густой смазкой, что обеспечивает установку механизма в любом положении в пространстве.
Двигатель:
Специальные синхронные электродвигатели с электромагнитной редукцией типа ДСОР и ДСТР являются приводом механизмов и обеспечивают поворотно-кратковременный режим работы исполнительны механизмов с частотой до 630 включений в час, продолжительностью включений до 25%.
Параметры электроисполнительного механизма
|
Обозначение механизмов |
Номинальный крутящий момент, N·m |
Номинальное время полного хода выходного вала, s |
Полный номинальный ход выходного вала, r |
Питание V |
Потреб- ляемая мощ- ность, W |
|
МЭОФ-40/25-0,25 К |
40 |
25 |
0,25 |
3 ф.; 380 |
110 |