Обоснование выбора типа регулятора
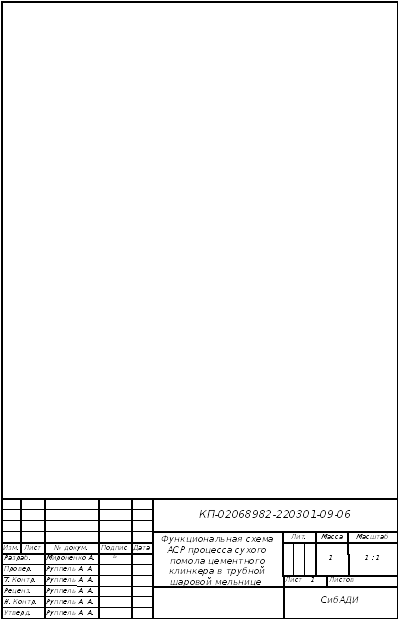
На основании заданных значений передаточных функций построим схему системы автоматического регулирования обжига клинкера в SIMULINK (рис. 18).
Wдатчика =0.4, Wрабочего органа=0.3/ (0.55p+1),
Wисполнительного механизма =10/ (0.15р+1).
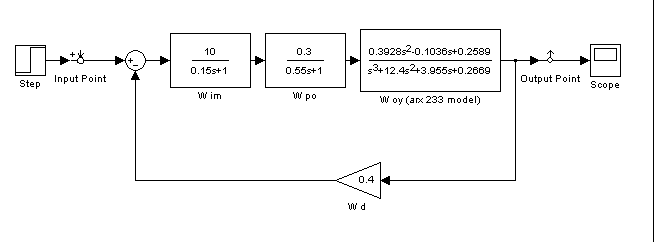
Рис. 18 Схема САР сухого помола цементного клинкера в трубной шаровой мельнице.
С помощью LTI построим переходную характеристику, ЛАХ и ЛФХ САР сухого помола цементного клинкера в трубной шаровой мельнице (рис. 19).
Рис.19 Переходная характеристика САР сухого помола цементного клинкера в трубной шаровой мельнице.
По виду переходной характеристики можно сказать, что имеющиеся показатели качества не удовлетворяют заданным:
Время регулирования составляет 24.6 с.
Установившееся значение – 1.34
Время нарастания – 10.3 с.
Статическая ошибка – 0,66
Заданные показатели качества и запасы устойчивости:
Время регулирования ≤50 с
Статическая ошибка ≤0,05
Перерегулирование ≤10 %
Время нарастания ≤15 с
Устойчивость по амплитуде ≥10 дБ
Устойчивость по фазе от 30 до 80 градусов.
Для построения ЛАХ, ЛФХ и АФХ необходимо разомкнуть систему (рис. 20), (рис. 21).
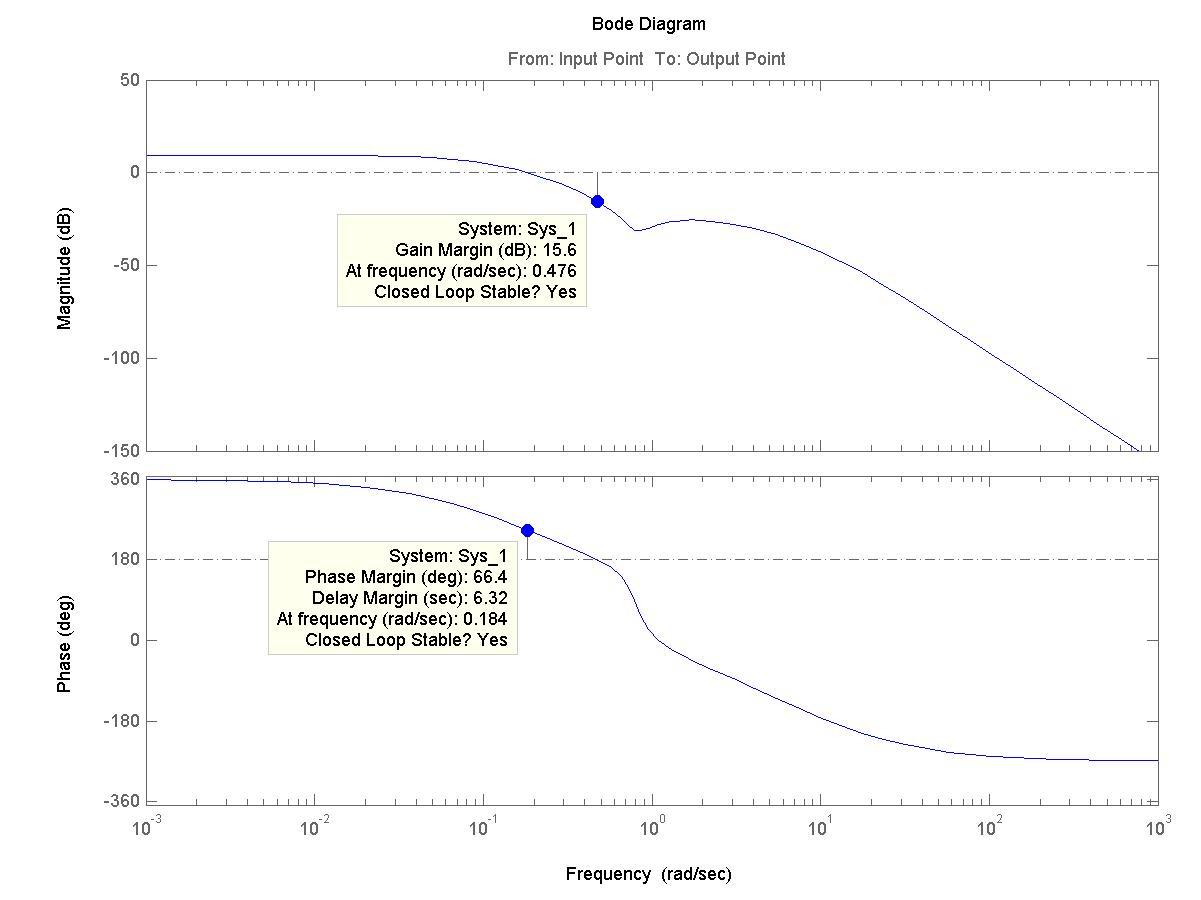
Рис. 20 ЛАХ и ЛФХ САР сухого помола цементного клинкера в трубной шаровой мельнице.
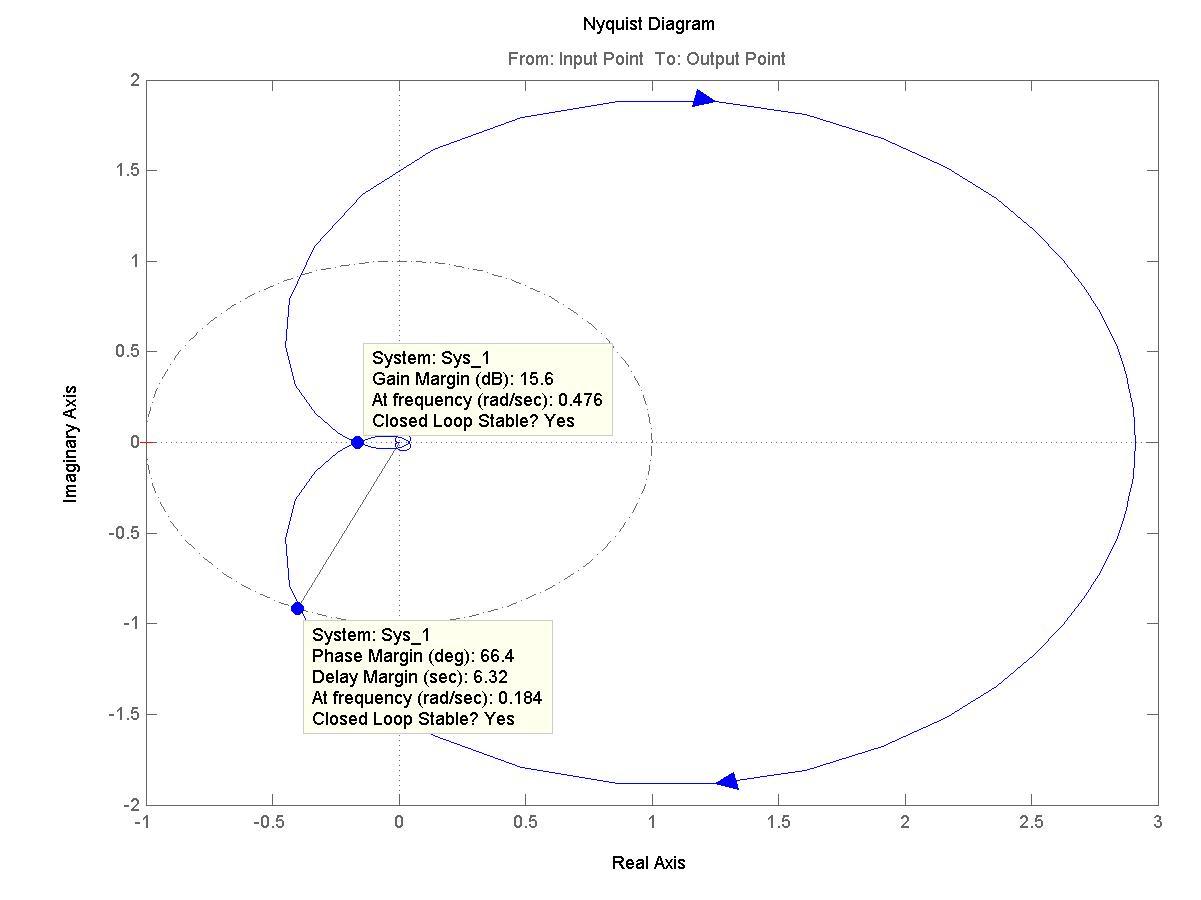
Рис. 21 АФЧХ САР сухого помола цементного клинкера в трубной шаровой мельнице.
По виду переходного процесса ясно, что для обеспечения заданных показателей качества и точности переходного процесса необходимо введение в систему линейного регулятора.
Необходимым условием надежной устойчивой работы АСР является правильный выбор типа регулятора и его настроек, гарантирующий требуемое качество регулирования.
В зависимости от свойств объектов управления, определяемых его передаточной функцией и параметрами, и предполагаемого вида переходного процесса выбирается тип и настройка линейных регуляторов.
Основные области применения линейных регуляторов определяются с учетом следующих рекомендаций:
И – регулятор со статическим ОР – при медленных изменениях возмущений и малом времени запаздывания (τ/Т<0.1);
П – регулятор со статическим и астатическим ОР – при любой инерционности и времени запаздывания, определяемом соотношением τ/Т<0.1;
ПИ – регулятор – при любой инерционности и времени запаздывания ОР, определяемом соотношением τ/Т<1;
ПИД-регуляторы при условии τ/Т<1 и малой колебательности исходных процессов.
Исходя из выше изложенных рекомендаций и учитывая, что вид переходной характеристики напоминает апериодический процесс, видно, что в данную систему подойдет П – регулятор с передаточной функцией Wreg(p) = Kp.
Получим следующего вида САР(рис. 22):
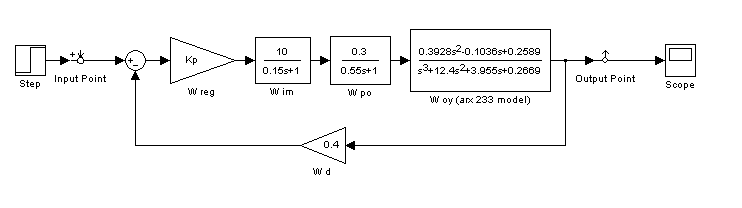
Рис. 22 Система автоматического регулирования с П-регулятором
Оптимизация параметров настройки П - регулятора
Для оптимизации параметров регулятора влажности воспользуемся пакетом прикладных программ для построения систем управления Nonlinear Control Design (NCD) Blockset, который реализует метод динамической оптимизации. Этот инструмент, строго говоря, представляющий собой набор блоков, разработанных для использования с Simulink, автоматически настраивает параметры моделируемых систем, основываясь на определённых пользователем ограничениях на их временные характеристики. Типовой сеанс в среде Simulink с использованием возможностей и блоков NCD Blockset состоит из ряда стадий (рис. 23).
Начальной стадией является создание модели исследуемой системы из стандартных блоков.
Затем вход блока NCD Outport соединяется с теми сигналами системы, на которые накладываются ограничения. Этими сигналами могут быть, например выходы системы, их среднеквадратические отклонения и т.д.
Затем в режиме командной строки MATLAB задаются начальные значения параметров, подлежащих оптимизации.
Двойным щелчком мыши на пиктограмме NCD Outport данный блок раскрывается.
В меню блока NCD Outport задаётся интервал дискретизации (один или два процента от длительности процесса моделирования и указываются имена (идентификаторы) параметров системы, подлежащих оптимизации.
Процесс оптимизации системы инициализируется нажатием кнопки Start.

Рис. 23 Схема САР для определения оптимальных параметров
настройки П - регулятора
|
|
|
|
Рис. 24 Окно настроек П - регулятора |
Рис. 25 Окно настроек NCD Outport |
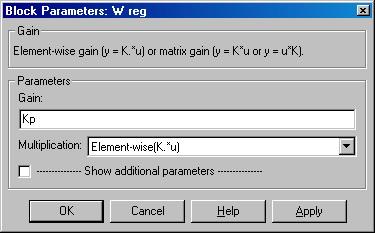
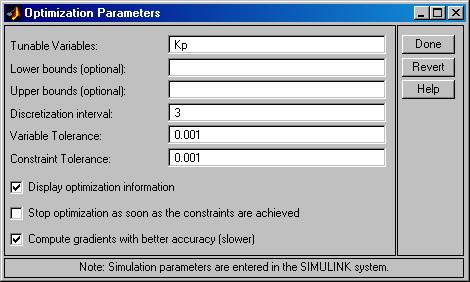
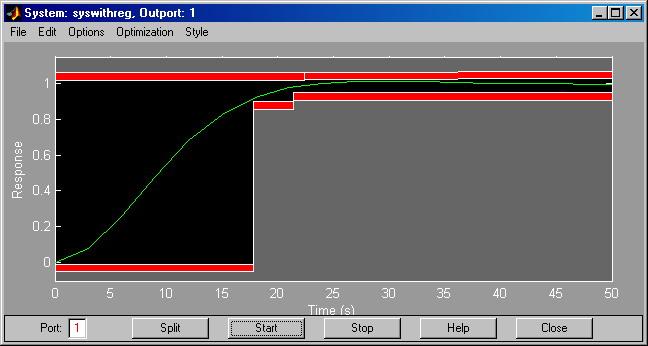
Рис. 26 NCD Outport процесс оптимизации параметров регулятора
По окончании работы NCD Outport в окне команд MATLAB можно получить оптимизированные значения коэффициентов П – регулятора, но двигая мышью красные линии (ограничения по переходному процессу) можно получить множество разных значений Kp, из которых методом анализа выбирают наилучший, исходя из приоритета характеристик переходного процесса.
В нашем случае наилучший будет:
>> Kp
Kp = 0.575 (рис. 27)
Анализ устойчивости и качества системы управления
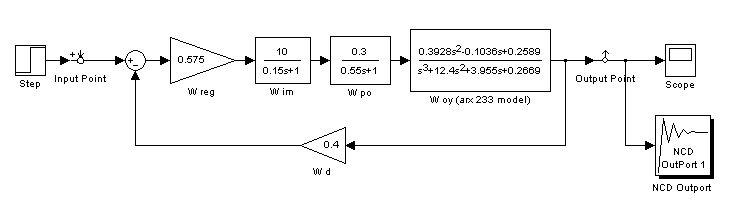
Рис 27 Анализ устойчивости и качества системы управления
Схема САР сухого помола цементного клинкера в трубной шаровой мельнице для снятия переходной характеристики (рис.28).
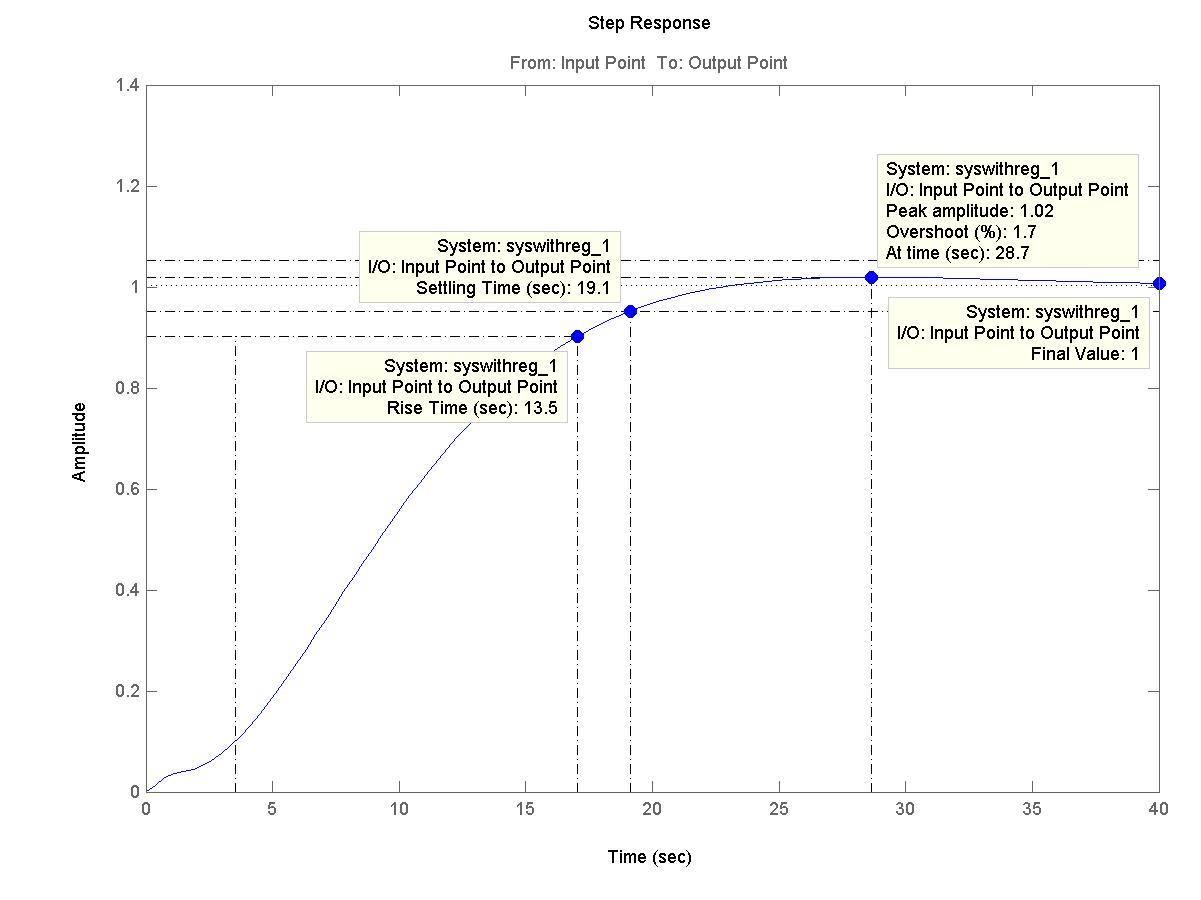
Рис. 28 Переходная характеристика САР сухого помола цементного клинкера в трубной шаровой мельнице
с введенным и оптимизированным П – регулятором.
По виду переходной характеристики можно определить показатели качества переходного процесса:
Время регулирования составляет 19.1 с.
Установившееся значение – 1
Время нарастания – 13.5 с.
Статическая ошибка – 0
Перерегулирование - 1.7 %
Для получения логарифмических амплитудных и фазовых характеристик для определения запасов устойчивости и амплитуде и фазе необходимо разомкнуть систему (рис. 29).
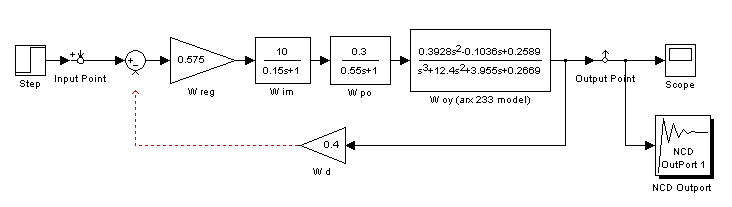
Рис. 29 Разомкнутая система САР
Схема разомкнутой САР для снятия логарифмических характеристик (рис. 30) и (рис. 31).
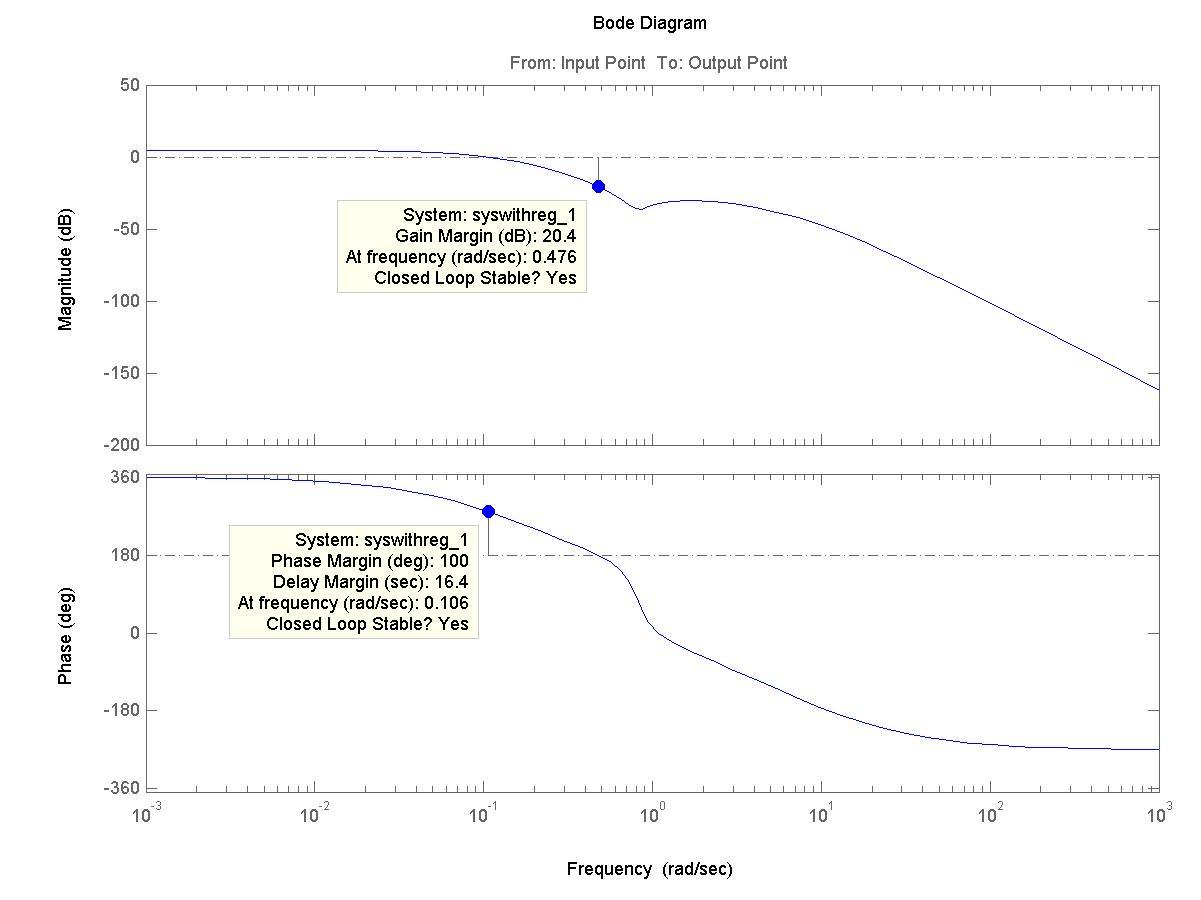
Рис. 30 ЛАХ и ЛФХ системы автоматического регулирования сухого помола цементного клинкера в трубной шаровой мельнице.
Из рисунка ЛАХ и ЛФХ видим:
Запас по амплитуде – 20.4 дБ;
Запас по фазе – 100 градусов.
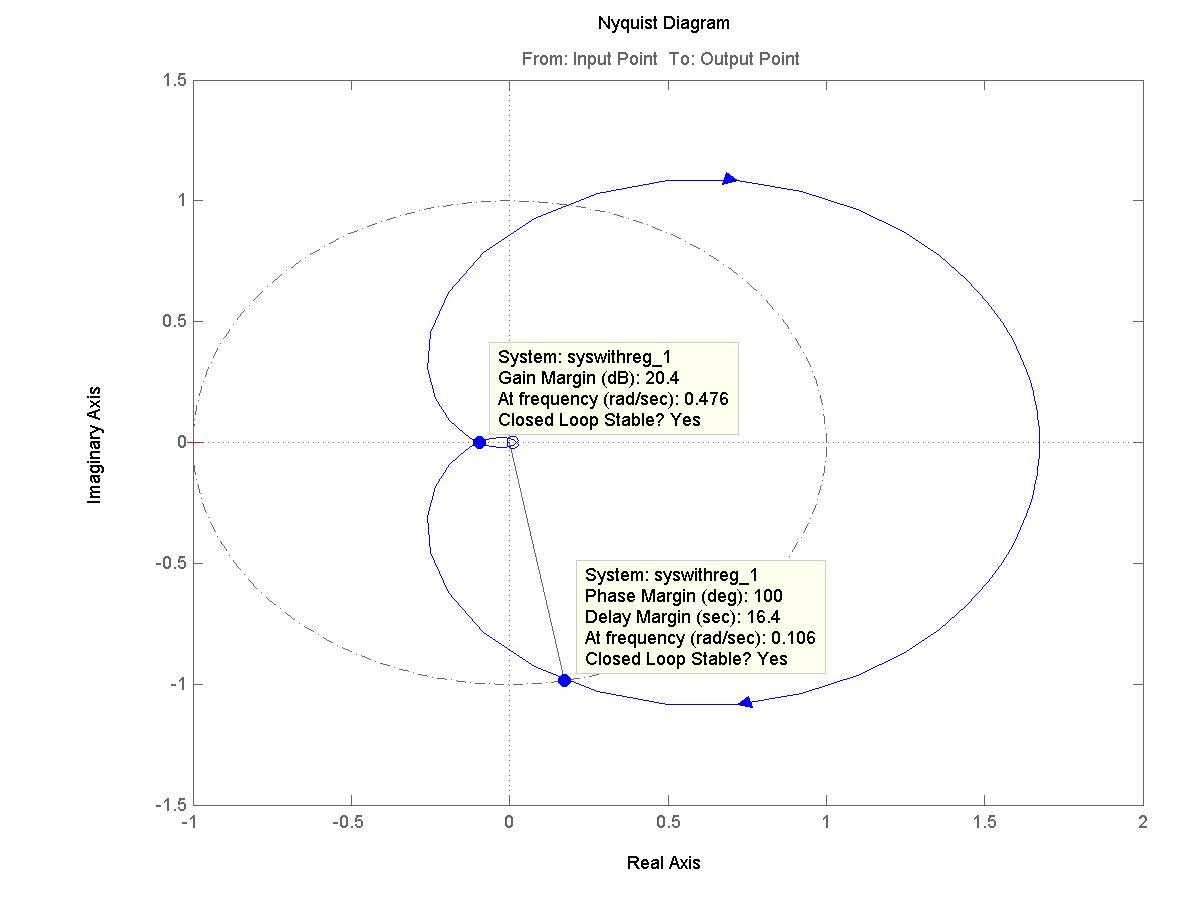
Рис. 31 АФЧХ системы автоматического регулирования сухого помола цементного клинкера в трубной шаровой мельнице.
На диаграмме Найквиста видна точка (-1;0), которая связана критерием устойчивости, также запасы устойчивости, как и на ЛАХ и ЛФХ.
ВЫВОД
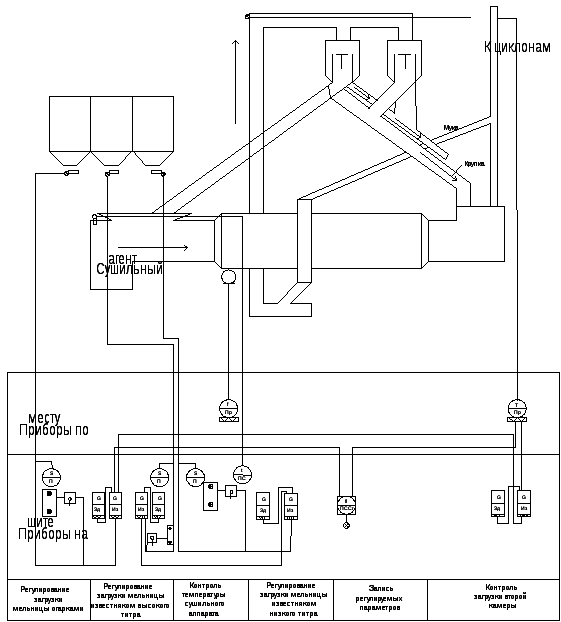
В данной курсовой работе проведена идентификация сухого помола цементного клинкера в трубной шаровой мельнице как объекта автоматического регулирования.
Проведена проверка на наблюдаемость и управляемость объекта управления.
На основе анализа переходных характеристик объекта управления был выбран наиболее подходящий для данного переходного процесса П – регулятор.
Проведена оптимизация настроечных параметров этого регулятора с помощью MATLAB.
В результате введения в систему П - регулятора были получены следующие параметры системы:
Время переходного процесса 19,1 с.;
Время нарастания – 13,5 с.
Перерегулирование – 1,7%;
Статическая ошибка – нет;
Запас по фазе – 100 градусов;
Запас по амплитуде – 20,4 дБ.
Запас устойчивости по фазе полученный в размере 100 градусов не удовлетворяет заданному (от 30 до 80), потому что заданных параметрах переходного процесса невозможно добиться желаемого запаса устойчивости по фазе, но с учетом наибольшего приоритета остальных параметров можно принять полученный запас устойчивости как наиболее подходящий в данной ситуации.
Учитывая полученные значения и принятые допущения параметров системы можно утверждать, что выполнены все поставленные в задании на курсовую работу требования.