

Раздел 7. Инерциальные навигационные системы
План раздела:
7.1. Особенности инерциальных навигационных систем;
7.2. Принципы определения текущих координат, скорости ЛА и построения вертикали в ИНС;
7.3. Классификация ИНС;
7.4. Инерциальная система типа И-11;
7.5. Бесплатформенная инерциальная навигационная система И42-1С.
7.1. Особенности инерциальных навигационных систем
Инерциальные навигационные системы (ИНС) – это точные автоматические устройства, основанные на применении измерителей ускорений (акселерометров), стабилизаторов для удержания акселерометров в определенном положении относительно инерционной системы координат (ИСК), счетно-решающих устройств для вычисления местоположения летальных аппаратов и указывающих приборов.
ИНС по способу определения координат местонахождения летательного аппарата относятся к системам счисления пути. Они используются для решения следующих навигационных задач:
– непрерывного измерения с помощью акселерометров ускорений центра масс ЛА под действием активных (негравитационных) сил;
– моделирования навигационных систем координат (НСК);
– вычисления составляющих скорости путем однократного интегрирования и координат местонахождения центра масс ЛА путем двухкратного интегрирования измеренных ускорений;
– измерения углов ориентации ЛА относительно ИСК (углов сноса и скольжения, углов крена, курса и тангажа).
ИНС имеют перед другими навигационными системами важные преимущества – универсальность применения, возможность определения основных параметров движения (координаты местонахождения, скорость, ускорение, направление движения, пространственная ориентация, т.е. угловое положение в заданной системе координат в пространстве, угловая скорость и др.), автономность действия, помехозащищенность, высокая точность при ограничении времени действия.
ИНС присущи определенные недостатки, главными из которых являются: возрастание погрешностей с течением времени, что ограничивает возможность использования во времени без применения корректирующих средств; сложность устройства и необходимость применения высокопрецизионных базовых измерительных элементов и вычислительных устройств, высокая стоимость в эксплуатации.
7.2. Принципы определения текущих координат, скорости ла и построения вертикали в инс
Рассмотрим движение
ЛА в одной плоскости вокруг неподвижной
Земли, имеющей форму шара. На горизонтальной
платформе поместим акселерометр. Пусть
ЛА, сохраняя горизонтальность движения
в течение времени
![]() ,
перемещается из точки
,
перемещается из точки![]() в точку
в точку![]() (рис. 7.1,а). Тогда интегратор, на вход
которого подается сигнал, пропорциональный
(рис. 7.1,а). Тогда интегратор, на вход
которого подается сигнал, пропорциональный![]() ,
т.е. величине путевой скорости ЛА. Если
выход первого интегратора
,
т.е. величине путевой скорости ЛА. Если
выход первого интегратора![]() соединить со входом второго интегратора
соединить со входом второго интегратора![]() (рис. 7.1,б), то на выходе последнего
появится сигнал, пропорциональный пути
(рис. 7.1,б), то на выходе последнего
появится сигнал, пропорциональный пути![]() ,
пройденному ЛА за время интегрирования
,
пройденному ЛА за время интегрирования![]() :
:
![]() . (7.1)
. (7.1)
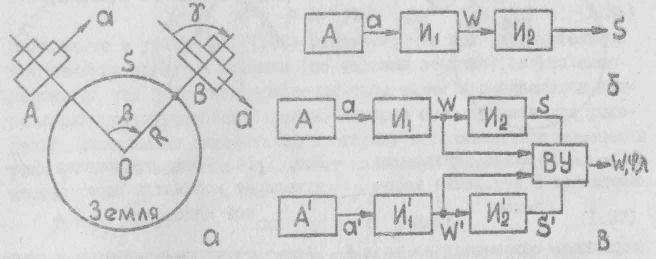
Рис. 7.1. Схема движения ЛА над землей и
вычисления его путевой скорости и
пройденного пути:
![]() – акселерометр,
– акселерометр,![]() – первый и второй интеграторы
– первый и второй интеграторы
Истинная вертикаль
за это время повернется на угол
![]() .
На этот же угол
.
На этот же угол![]() (где
(где![]() – расстояние от центра Земли до ЛА)
должна повернуться и платформа с
акселерометром, чтобы она осталась в
горизонтальном положении. Таким образом,
зная координаты точки старта
– расстояние от центра Земли до ЛА)
должна повернуться и платформа с
акселерометром, чтобы она осталась в
горизонтальном положении. Таким образом,
зная координаты точки старта![]() ,
можно определить координаты любой точки
,
можно определить координаты любой точки![]() и вектор путевой скорости
и вектор путевой скорости![]() .
.
Если движение
происходит не в одной плоскости, а на
поверхности шара, то можно представить
горизонтально стабилизированную
платформу с двумя перпендикулярно
расположенными акселерометрами,
ориентированными по меридиану и
параллели, и интеграторами. Ориентация
акселерометров в азимутальной плоскости
может быть произведена, например, с
помощью гироскопов. Такая платформа с
вычислительным устройством (рис. 7.1,в)
позволяет определить абсолютную величину
![]() ,
путевой угол движения ЛА, координаты
,
путевой угол движения ЛА, координаты![]() ,
,![]() .
.
Рассмотрим принцип
построения вертикали на ЛА. Эта задача
является обратной задаче определения
![]() ,
,![]() и
и![]() .
Если ЛА переместится из точки
.
Если ЛА переместится из точки![]() (рис. 7.1,а) с направлением вертикали
(рис. 7.1,а) с направлением вертикали![]() в точку
в точку![]() с направлением вертикали
с направлением вертикали![]() ,
то истинная вертикаль повернется на
угол
,
то истинная вертикаль повернется на
угол![]() .
Для того, чтобы платформа в точке
.
Для того, чтобы платформа в точке![]() заняла горизонтальное положение, ее
необходимо повернуть относительно
первоначального положения
заняла горизонтальное положение, ее
необходимо повернуть относительно
первоначального положения![]() на угол
на угол![]() .
Таким образом, чтобы решить задачу
построения вертикали, необходимо в
любой момент времени знать величину
угла
.
Таким образом, чтобы решить задачу
построения вертикали, необходимо в
любой момент времени знать величину
угла![]() и поворачивать платформу на угол
и поворачивать платформу на угол![]() .
Приведенные выше соображения позволяют
сделать вывод, что для получения ИНС
необходимо объединить системы определения
.
Приведенные выше соображения позволяют
сделать вывод, что для получения ИНС
необходимо объединить системы определения![]() ,
,![]() ,
,![]() и построения вертикали.
и построения вертикали.
Такой вывод
теоретически можно обосновать следующими
рассуждениями. Пусть в точке
![]() (рис. 7.2) помещена платформа с акселерометром,
которая может вращаться вокруг оси,
перпендикулярной плоскости чертежа, и
удерживается в заданном направлении в
пространстве (например, в направлении
(рис. 7.2) помещена платформа с акселерометром,
которая может вращаться вокруг оси,
перпендикулярной плоскости чертежа, и
удерживается в заданном направлении в
пространстве (например, в направлении![]() )
с помощью гироскопа. Поскольку процесс
построения вертикали должен быть
непрерывным, то вместо равенства
)
с помощью гироскопа. Поскольку процесс
построения вертикали должен быть
непрерывным, то вместо равенства![]() следует записать
следует записать
![]() . (7.2)
. (7.2)
Величина
![]() определяется через ускорение, измеряемое
акселерометром
определяется через ускорение, измеряемое
акселерометром![]() ,
тогда
,
тогда
![]() . (7.3)
. (7.3)
В результате будет
построена устойчивая вертикаль, а также
определены путевая скорость
![]() и координаты места ЛА
и координаты места ЛА![]() ,
,![]() или пройденный путь
или пройденный путь![]() .
.
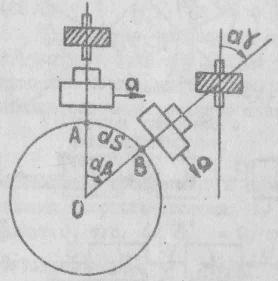
Рис. 7.2. Схема построения вертикали и счисления координат
Рассмотренная
система имеет свойства маятника. Если
в точке
![]() (рис. 7.3) нормаль к платформе отклонится
от истинной вертикали на малый угол
(рис. 7.3) нормаль к платформе отклонится
от истинной вертикали на малый угол![]() ,
то акселерометр измерит составляющую
земного ускорения
,
то акселерометр измерит составляющую
земного ускорения
![]() . (7.4)
. (7.4)
Так как угол
![]() имеет небольшую величину, то можно
считать
имеет небольшую величину, то можно
считать![]() ,
тогда
,
тогда![]() и
и
![]() . (7.5)
. (7.5)
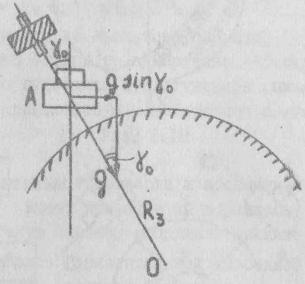
Рис. 7.3. Схема отклонения вертикали от нормали к горизонтальной плоскости
Продифференцировав (7.5), получим уравнение движения системы
![]() . (7.6)
. (7.6)
Это уравнение математического маятника относительно истинной вертикали места ЛА. Период колебаний вычисляется по формуле
![]() мин. (7.7)
мин. (7.7)
Получен период
маятника Шулера при длине его подвеса
![]() =6371
км. Маятник Шулера имеет следующее
свойство: его перемещение в пространстве
равно в каждое мгновение дуге,
представляющей собой смещение его
подвеса вдоль поверхности Земли, т.е.
маятник всегда поворачивается вокруг
точки подвеса на тот же угол, что и
вертикаль.
=6371
км. Маятник Шулера имеет следующее
свойство: его перемещение в пространстве
равно в каждое мгновение дуге,
представляющей собой смещение его
подвеса вдоль поверхности Земли, т.е.
маятник всегда поворачивается вокруг
точки подвеса на тот же угол, что и
вертикаль.
Обычную маятниковую вертикаль с периодом колебаний 84,4 мин создать невозможно. Невозмущаемая ускорениями вертикаль с периодом колебаний Шулера может быть построена при сочетании акселерометра и трехстепенного гироскопа, ошибка которого корректируется по сигналам, пропорциональным интегралу ускорения, измеряемого этим акселерометром, установленным на вертикальной оси гироскопа. Подобный способ коррекции носит название интегральной коррекции.