

Раздел 11. Обзорно-сравнительные радионавигационные системы
План раздела:
11.1 Принцип построения;
11.2. Система навигации по рельефу местности;
11.3. Системы навигации по картам местности.
11.1 Принцип построения
Суть обзорно-сравнительных методов навигации заключается в определении местонахождения объекта путем сравнения местности, изображенной на карте или находящейся в системах памяти, с ее фактическим видом, наблюдаемым с помощью бортовых обзорных устройств (прицелов, визиров, телевизионных, радиолокационных и других) или визуально. Если изображение местности на карте и наблюдаемый ее вид совпадают, то местонахождение объекта считается опознанным, а координаты его определены. Кроме этого могут быть определены координаты местонахождения ориентиров, целей, аэродромов и других объектов, а также различных астрономических ориентиров.
Наиболее распространенным и используемым почти на всех видах пилотируемых летательных аппаратов является визуальное ориентирование. В полете член экипажа наблюдает через окно кабины или с помощью оптического прицела (визира) окружающую местность и сравнивает ее с географической картой. Практическая точность такой ориентировки без специальных приборов порядка 0,3…0,6 км на высотах полета 2…3 км и 2…4 км – на высотах 6…10 км. Применение оптического визира позволяет определить местонахождение с точностью около 4% от высоты полета.
Достоинствами обзорно-сравнительных методов навигации являются:
– высокая достоверность и точность измерений, а также отсутствие накапливающихся погрешностей;
– высокий уровень информационной избыточности измерений;
– широкая возможность использования неавтоматизированных (визуальная ориентировка) и автоматизированных средств измерения.
Однако у обзорно-сравнительных методов существуют недостатки и ограничения. Измерения возможны только при видимости поверхности Земли или ориентиров. Воздействие помех – облачности, туманов, недостаточной освещенности – может существенно снизить эффективность обзорно-сравнительной навигации. Кроме того, при полетах над безориентирной местностью (моря, пустыни и т.п.) этот вид навигации применять нельзя.
Для успешной реализации обзорно-сравнительного метода навигации требуется достаточно полное обеспечение маршрутными картами или необходимым запасом априорной информации о планируемых для наблюдения ориентирах.
По мере развития навигационной техники, использования инфракрасных, радиолокационных и других средств обзора, а также электронных средств памяти многие из перечисленных выше недостатков и ограничений успешно устраняются. На современных ЛА находят применение автоматизированные обзорно-сравнительные системы навигации.
Обзорно-сравнительные системы (ОСС) предназначены для определения местоположения ЛА по результатам сравнения некоторых наблюдаемых с помощью бортовых датчиков физических параметров, характеризующих местность, над которой совершается полет, с эталонными параметрами, хранящимися в памяти системы. В радиотехнических ОСС наблюдаемыми параметрами являются высоты точек рельефа местности, дальность и угловые координаты радиолокационных ориентиров на местности, а также другие величины, измеряемые радионавигационными и радиолокационными устройствами и системами.
Классификация ОСС. Обзорно-сравнительные системы навигации классифицируются по следующим признакам.
В зависимости от физической природы воспринимаемых сигналов системы подразделяются на оптические, инфракрасные, радиационные и радиотехнические.
В зависимости от степени активности измерителя системы могут быть пассивными, использующими прямые сигналы ориентиров (искусственных или естественных), и активными, получающими изображения поверхности Земли и ориентиров путем их облучения и приема отраженных сигналов.
По характеру автономности ОСС подразделяются на ограниченно-автономные (основанные на использовании естественных, существующих в природе ориентиров) и неавтономные (основанные на использовании искусственных наземных или небесных ориентиров).
В зависимости от способа воспроизведения информации на экране различают поэлементные и проекционно-лучевые ОСС.
В зависимости от числа измеряемых ориентиров системы могут быть одноориентирные, многоориентирные и с непрерывным потоком ориентиров.
По уровню автоматизации системы подразделяются на визуальные, полуавтоматические и автоматические.
ОСС могут применяться для ближнего обзора, необходимого при взлете, посадке или наведения на цель; для маневрирования в зоне аэродромов; управления полетом по заданной траектории; изучения местности. ОСС могут обеспечивать не только отображение навигационной обстановки, но и использоваться для самолетовождения, коррекции других навигационных измерителей, управления различными бортовыми системами.
Принцип действия
ОСС. До полета
составляется эталонная карта местности
(ЭКМ), над которой предполагается полет.
Во время полета бортовые датчики ЛА
воспроизводят текущее изображение
местности, т.е. дают текущую карту
местности (ТКМ), которая сравнивается
в специальном устройстве с ЭКМ. По
результатам сравнения находят отклонение
текущего положения ЛА (точка
![]() на рис. 11.1) от заданного (точка
на рис. 11.1) от заданного (точка![]() ).
Продольное
).
Продольное![]() и поперечное
и поперечное![]() отклонение ЛА от точки
отклонение ЛА от точки![]() вычисляется по сдвигу ЭКМ, который
необходим для совпадения эталонной и
текущей карт местности. Значения
вычисляется по сдвигу ЭКМ, который
необходим для совпадения эталонной и
текущей карт местности. Значения![]() и
и![]() могут быть использованы либо для вывода
ЛА на заданную траекторию, либо для
коррекции основной (грубой) навигационной
системы ЛА.
могут быть использованы либо для вывода
ЛА на заданную траекторию, либо для
коррекции основной (грубой) навигационной
системы ЛА.
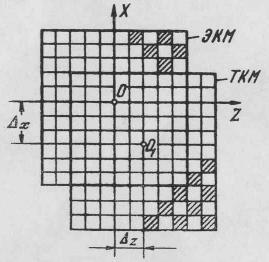
Рис. 11.1. Смещение эталонной и текущей карт местности при отклонении ЛА
от заданной траектории
Структурная
схема ОСС.
Необходимыми элементами ОСС (рис. 11.2)
должны быть датчики текущей ДТКМ и
эталонной ДЭКМ карт местности, а также
формирователь текущей карты ФТКМ,
который преобразует сигналы ДТКМ в
форму, удобную для сравнения с ЭКМ.
Обычно ФТКМ выполняет дискретизацию
по времени, квантование по уровню и
масштабирование по скорости
![]() и высоте
и высоте![]() сигналов ДТКМ. Требуемая для такого
преобразования информация поступает
от инерциальной системы ИНС, радиовысотомера
РВ и др. Устройство сравнения УС перебирает
возможные положения ЛА на эталонной
карте и для каждого такого положения
вычисляет корреляционную функцию (КФ)
наблюдаемого изображения (ТКМ) и
эталонного изображения (ЭКМ). Поэтому
метод, на котором основана ОСС, называют
корреляционными, а сами системы относят
к классу корреляционно-экстремальных.
В таких системах совпадению изображений
соответствует экстремум (максимум или
минимум) нормированной КФ. Решающее
устройство РУ, сопоставляя результаты
сравнения с информацией о местоположении
ЛА от грубой навигационной системы ГНС
(система счисления пути), определяет
координаты летательного аппарата КЛА.
Функции ФТКМ, УС и РУ обычно выполняет
ЭВМ ОСС или отдельные специализированные
процессоры.
сигналов ДТКМ. Требуемая для такого
преобразования информация поступает
от инерциальной системы ИНС, радиовысотомера
РВ и др. Устройство сравнения УС перебирает
возможные положения ЛА на эталонной
карте и для каждого такого положения
вычисляет корреляционную функцию (КФ)
наблюдаемого изображения (ТКМ) и
эталонного изображения (ЭКМ). Поэтому
метод, на котором основана ОСС, называют
корреляционными, а сами системы относят
к классу корреляционно-экстремальных.
В таких системах совпадению изображений
соответствует экстремум (максимум или
минимум) нормированной КФ. Решающее
устройство РУ, сопоставляя результаты
сравнения с информацией о местоположении
ЛА от грубой навигационной системы ГНС
(система счисления пути), определяет
координаты летательного аппарата КЛА.
Функции ФТКМ, УС и РУ обычно выполняет
ЭВМ ОСС или отдельные специализированные
процессоры.
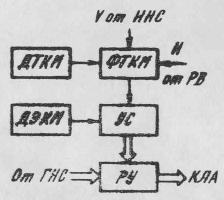
Рис. 11.2. Обобщенная структурная схема обзорно-сравнительной системы
Особенности формирования ЭКМ. Точность ОСС зависит от степени достоверности и детальности ЭКМ, которую получают с помощью радиолокаторов, установленных на ИСЗ; аэросъемки местности; детальных топографических карт и других источников информации. Как правило, ЭКМ представляют собой матрицу из ячеек, содержащих кодированную информацию об элементарном участке местности. Минимальный размер ячейки ЭКМ определяется разрешающей способностью бортового датчика ТКМ, а записанное в нее число – динамическим диапазоном изменения измеряемого датчиком параметра и принятым уровнем квантования сигнала этого датчика. Чем меньше размеры ячейки (чем выше разрешающая способность датчика) и уровень квантования, тем более подробной будет эталонная карта и тем выше потенциальная точность ОСС. Однако при большой протяженности маршрута, для которого составляется эталонная карта, и большой детальности последней требуется большой объем памяти ЭВМ ОСС. Поэтому при выборе параметров ЭКМ исходят из компромисса между требуемой точностью и объемом памяти системы. Одни из таких компромиссных подходов заключается в том, что в качестве основного навигационного средства используется система счисления пути ССП, а ОСС служит для коррекции этой системы на отдельных участках траектории полета.
В зависимости от вида текущей карты местности различают два основных типа ОСС навигации: по рельефу местности и по картам местности.