

20. Ускорение точки в криволинейной системе координат.
Криволинейная система координат, или криволинейные координаты в математике — система координат в евклидовом (аффинном) пространстве, или в области, содержащейся в нём. Криволинейные координаты противопоставляются прямолинейным: декартовым, а также косоугольным. Применяются обычно на плоскости (n=2) и в пространстве (n=3); число координат равно размерности пространства n. Наиболее известным примером криволинейной системы координат являются полярные координаты на плоскости.
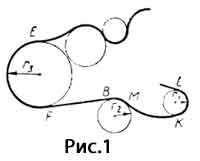
Ускорение при криволинейном движении точки направление ее скорости все время изменяется, а модуль скорости может как изменяться, так и оставаться постоянным. Но даже если модуль скорости не изменяется, ее все равно нельзя считать постоянной. Ведь скорость - величина векторная, а для векторных величин модуль и направление одинаково важны. Поэтому криволинейное движение всегда движение ускоренное. С изменением скорости по модулю мы уже знакомы. Ведь при равноускоренном прямолинейном движении изменяется именно модуль скорости. И мы знаем, что в этом случае вектор ускорения направлен вдоль вектора скорости или против него, а модуль ускорении определяется изменением модуля скорости в единицу времени. Так как нам это уже известно, то в дальнейшем мы будем рассматривать только такое криволинейное движение, при котором модуль скорости остается все время постоянным, так что ускорение будет связано только с изменением направления вектора скорости. Как направлено и чему равно это ускорение? И модуль, и направление ускорения должны, очевидно, зависеть от формы криволинейной траектории. Но нам не придется рассматривать каждую из бесчисленных форм криволинейных траекторий. На рисунке 1 показана сложная траектория, по которой движется тело. Из рисунка видно, что отдельные участки криволинейной траектории представляют собой приблизительно дуги окружностей, изображенных тонкими линиями. Например, участки KL или ВМ - это дуги окружностей малых радиусов, участок EF - это дуга окружности большого радиуса.Таким образом, движение по любой криволинейной траектории можно представить как движение по дугам некоторых окружностей. Поэтому задача нахождения ускорения при криволинейном движении сводится к отысканию ускорения при вижении тела по окружности.
21 Скорость и ускорение точки в цилиндрической системе координат
Цилиндрическая
система координат представляет собой
трёхмерную систему координат, являющуюся
обобщением полярной системы координат
посредством добавления третьей
координаты, которая задаёт смещение
точки M вдоль
оси 0z относительно
координатной плоскости 0xy.
Положение точки M в
цилиндрической системе координат
задается тройкой чисел ρ, φ
и z,
где ρ – расстояние от точки M
до оси 0z (![]() );
φ – угол, образованный проекцией
радиус-вектора
);
φ – угол, образованный проекцией
радиус-вектора ![]() на плоскость Оху с
положительным направлением оси Ох (
на плоскость Оху с
положительным направлением оси Ох (![]() );
z –
проекция точки M
на ось 0z (
);
z –
проекция точки M
на ось 0z (![]() ).
).
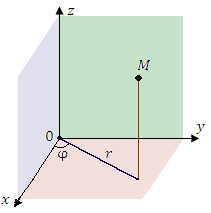 Рис.
1.
Цилиндрические координаты точки M.
Рис.
1.
Цилиндрические координаты точки M.
Связь между декартовыми и цилиндрическими координатами описывается формулами
![]()
![]()
Определим выражения для скорости и ускорения точки в
цилиндрической системе координат r=r(t), j = j(t), z=z(t)
Учитывая связь декартовых координат с цилиндрическими имеем
X=r cosϕ, y = r sinϕ.
Введем криволинейные координаты q1=r, q2=ϕ, q3=z.
Найдем коэффициенты Ламе. Так как dS1=H1 dq1, dS2=H2 dq2, dS3=H3 dq3, и, кроме того,
dS1=dr, dS2=rd ϕ , dS3=dz, то имеем H1=1, H2=r, H3=1.
Найдем проекции скорости. Vq1=Vr= q' 1H1=r' ,
Vq2=Vϕ=q' 2H3 =rϕ',
Vq3=Vz=q' 3H3=z'
Так как цилиндрическая система координат является ортогональной, то модуль
скорости находим по формуле
V= =
=

Определим ускорение.
T=1/2V2+1/2( ),
),
 r'
r'
 r2
ϕ'
r2
ϕ'
 z'
z'
 rϕ'2
rϕ'2
 0
0
0
0
По формуле Wqi= j=1,2,3
j=1,2,3
Находим проекции ускорения на оси заданной криволинейной системы координат
W z=r''-rϕ'2 , Wϕ = rϕ'' + 2r'ϕ' , Wz= z''.