

43. Реализация цифрового пи-регулятора.
Зададим Ки=4,646; Кп=0,1625
ПФ регулятора:


![]()
![]()
![]()
Запишем производную через конечную разность:


Домножим на T и r(k) вынесем за скобки:
![]()
Зададим период квантования:
T=0,02
![]()
![]()
![]()
![]()

Составим схему моделирования

44. Реализация цифрового пд-регулятора.
Зададим
Кп=0,1625; Кд=0,0094 ПФ регулятора: ![]()

![]()
![]()
![]() Запишем
производную через конечную разность:
Запишем
производную через конечную разность:
![]()
![]()
Домножим на T и r(k) вынесем за скобки:
![]()
Зададим период квантования:
T=0,2
![]()
![]()
![]()

![]()

45. Синтез цифрового пид-регулятора
Уравнение с аналогового регулятора:

Отличие цифрового ПИД-регулятора состоит в том, что операции интегрирования и дифференцирования осуществляются численным методом.
Операция дифференцирования:
Z – ПФ дифференциатора;

Операция интегрирования:
![]()
Z – передаточная функция интегратора.
В соответствии с полученной передаточной функцией ПИД-регулятор можно представить следующей структурной схемой:
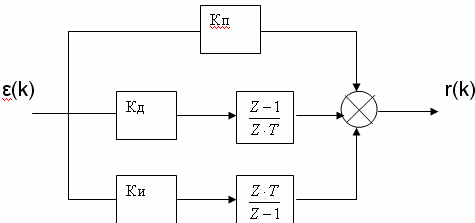
При синтезе ПИД-регулятора можно использовать 2 подхода:
Если период квантования Т очень мал, то можно считать, что операции численного интегрирования и дифференцирования осуществляются с абсолютной точностью. При этом регулятор синтезируется как аналоговый, а затем реализуется с помощью конечноразностных выражений.
Если период квантования Т нельзя сделать малым, то регулятор синтезируется как цифровой. Для этого используется его передаточная функция разомкнутой системы, выполняется билинейное преобразование и применяются частотные методы синтеза