

28. Кинематический анализ зубчатых механизмов с подвижными осями колес (планетарные зубчатые передачи), 4-х звенный планетарный механизм Джемса. Формула Виллиса.
Планетарные механизмы - это зубчат. передачи имещие подвижную ось. Обязательно наличие звена-«водила». Все оси на которые закреплены зубчатые колёса параллельны между собой.
Если W=1-планетарная зубчатая передача.
W≠1-дифференциальная
Редуктор Джемса. Это 4-х звенный планетарный механизм.
1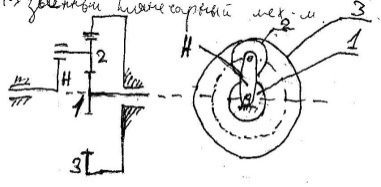 -центральное
колесо(подвижное), может быть неподвижным,
когда колесо 3 неподвижно(-солнечное
центральное колесо), 2-саттелит-подвижное
колесо(вращается вокруг колеса 1),
3-центральное неподвижное, может быть
подв., когда колесо 1 неподвижно.(-опорное
колесо),
-центральное
колесо(подвижное), может быть неподвижным,
когда колесо 3 неподвижно(-солнечное
центральное колесо), 2-саттелит-подвижное
колесо(вращается вокруг колеса 1),
3-центральное неподвижное, может быть
подв., когда колесо 1 неподвижно.(-опорное
колесо),
Н-водило- подвижное звено несущее вал сателлита. (1-2)-вр.п., 5 кл.;(2-Н)- вр.п., 5 кл.;
(Н-0)- вр.п., 5 кл.;(1-2),(2-3)-4 кл.
m=4-все звенья
n=3-подвижные звенья(1,2,Н)

 -для
определения применяем метод обращонного
дв-я.
-для
определения применяем метод обращонного
дв-я.
Всей
системе придают такую угловую скорость
которая = угловой скорости водила Н, но
противиположна по направлению.
 .
.

 -исходная
формула Виллеса
-исходная
формула Виллеса
29) Планетарные редукторы со сдвоенными сателлитами. Редуктор Джемса. Редуктор Давида. Определение передаточных отношений.
- расчётная формула
 ,
m=1
,
m=1
 -
расчётная формула.
-
расчётная формула.
Р едуктор
Джеймса-
одно зацепление внешнее другое внутреннее.
На одном валу неподвижно закреплено
2-а сателлита и этот вал несёт водило.
едуктор
Джеймса-
одно зацепление внешнее другое внутреннее.
На одном валу неподвижно закреплено
2-а сателлита и этот вал несёт водило.

 ,
т.к. m=1
,
т.к. m=1
 -
расчётная формула Джеймса.
-
расчётная формула Джеймса.

Редуктор Давида- оба зацепления внешние

 ,
т.к. m=2
,
т.к. m=2
 -
расчётная формула.
-
расчётная формула.
30) Подбор чисел зубьев планетарного редуктора (соосность, соседство, условие сборки).
Чтобы подобрать число зубьев рассмотрим 3 условия: соосности, соседства, сборки
Условие соосности - две передачи соосны если зубчатые колёса одной передачи имеют оси совпадают с осью другой передачи.

r1+
r2=
r3-
r2;
 =
=
m-модуль заципления ,мм
Условие
сборки:
Проверяем редуктор на условие сборки
 =с
где с- любое целое число. При сборке
планетарного редуктора 1-вый пост сотелит
полностью определяет взаимное расположение
центральных колёс. Выполняется если
с-целое число.
=с
где с- любое целое число. При сборке
планетарного редуктора 1-вый пост сотелит
полностью определяет взаимное расположение
центральных колёс. Выполняется если
с-целое число.
Условие соседства

выполняется
когда расстояние между осями двух
смежных сотелитов больше диаметра
окружности их вершин. Z-
число зубьев; к-число сотелитов(в маш
строй к= 2—5) Окружности вершин сотелита
не должны пересекаться
 – формула условия соседства.
– формула условия соседства.
 – возможное число сателлитов
– возможное число сателлитов
31) Эвольвента окружности и ее основные свойства.
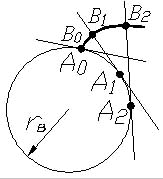
Наибольшее применение получили эвольвентные зубчатые передачи с профилем зубьев, очерченным по эвольвенте (рис. 72).
Эвольвентой круга называется траектория точки, лежащей на прямой, которая перекатывается без скольжения по окружности радиуса rв, называемой основной.
Эвольвента имеет следующие свойства:
1) начинается с основной окружности;
2) нормаль к эвольвенте является касательной к основной окружности;
3) радиус кривизны эвольвенты в каждой её точке лежит на нормали к эвольвенте в этой точке.
Основная окружность представляет собой геометрическое место центров кривизны эвольвенты и является её эволютой.
3 2)
Основными параметрами зубчатого колеса
являются:
2)
Основными параметрами зубчатого колеса
являются:
z – число зубьев;
ra – радиус (диаметр) окружности
выступов;
rf – радиус (диаметр) окружности
впадин;
rb - радиус (диаметр) основной окружности;
r - радиус (диаметр) делительной окружности, т. е. окружности, которая является начальной в станочном зацеплении колеса с режущим инструментом; р – шаг по делительной окружности;
h – высота зуба, равная h=ha+hf, где:
ha – высота головки зуба;hf – высота ножки зуба;
m – модуль зацепления, определяемый из условия:
![]() ,
т. е.
,
т. е.
 (измеряется
в мм).
(измеряется
в мм).
Величина m стандартизирована, а делительная окружность является окружностью стандартного модуля. Обычно размеры зубчатого колеса и зубьев выражаются через m.
Так,
например:
![]() ,
где
,
где
![]() -
коэффициент высоты головки зуба;
-
коэффициент высоты головки зуба;
![]() ,
где
,
где
![]() -
коэффициент радиального зазора;
-
коэффициент радиального зазора;
![]() ;
;
![]() ;
;
![]() ,
где α – угол исходного контура режущего
инструмента.
,
где α – угол исходного контура режущего
инструмента.
Обычно
для стандартных зубчатых колёс:
![]() ;
;
![]() ;
α=20º.
;
α=20º.