

47) Кинематических размеров кулачковых механизмов. Минимальный радиус вектора кулачка (кулачковый механизм с коромысловым толкателем).
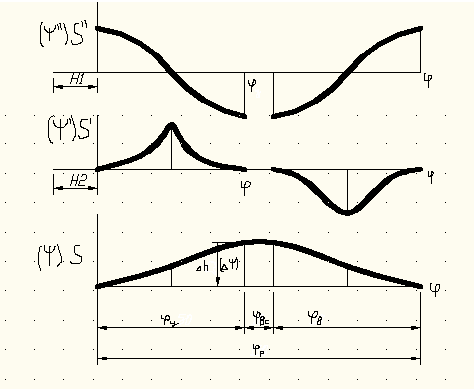
Исходные данные S-φ-график пути толкателя S,- φ-график оналогов скорости толкателя
S,,- φ-график оналогов ускорения. Начальная схема
µφ=….(гр/мм) мастаб коэфиц по оси S и ψ
µs=h/∆h (мм/мм) по оси S
µψ=ψmax/∆ψ (гр/мм) по оси ψ
h- ход толкателя (мм)
∆h-значение велечины h на графике S-φ (мм)
Ψmax- угловой ход коромысла (град)
∆ψ значение Ψmax на на графике S-φ (мм)
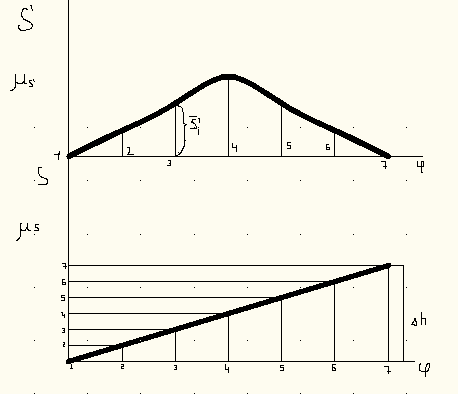
По осям S,- ψ,
µs,= µs/ µφ*H2 (мм/мм)
µψ,= µψ/ µφ*H2 (1/мм)
H2- полюсное расстояние интегрирования на графике скоростей
По осям S,,- ψ,,
µs,,= µs, / µφ*H1 (мм/мм)
µψ,,= µψ,/ µφ*H1 (1/мм)
H1-полюсное интегрирования расстояние на графике ускорений
отрезки на графике S-φ по оси φ равны между сабой по оси S не равны
После второго графика писать
µR= µS= µs,
Определяем К- коэфиц пропорциональности между этими масштабами
К= µS/µs,
Rmin=Rmin* µR (ММ)
Rmin- с графика (мм)
rp ≤0.35Rmin
46) Минимальный радиус вектор кулачка (кулачковый механизм и возвратно-поступательным толкателем).
Смотри вопрос №47 там все графики перерисовать надо в этот вопрос.
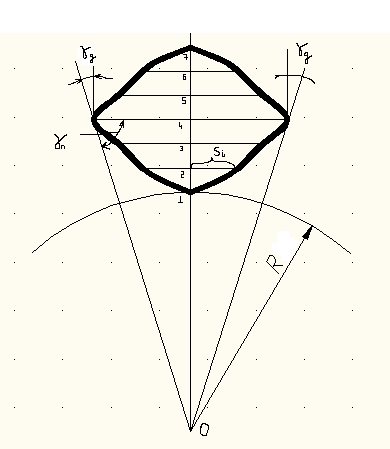
49) Построение цпк и дпк для кулачковых механизмов с коромысловым толкателем.
При построении профиля кулачка с качающимся толкателем (рис.14) из центра O1 проводят в масштабе µl окружности радиусами r0 и aw. Точку O1 соединяют с произвольно выбранной точкой O20 на окружности радиуса aw. От луча O1O20 в направлении -w1 откладывают угол рабочего профиля кулачка Φ1p.

Дугу, соответствующую углу Φ1p делят на части в соответствии с делением оси Φ1 на графике SB(Φ1). Из точек O20,O21,O22,... проводят дуги радиусом l2 от точек 0,1,2,... на окружности радиуса r0 . От точек 0, 1, 2, ... по дугам откладывают в масштабе перемещения точки В толкателя - SB. Соединяя полученные точки В0 ...Вк плавной кривой, получают теоретический профиль кулачка. Из прочностных или геометрических соображений выбирают радиус ролика, учитывая соотношения:
RP = (0,25-0,4) r0; или RP < 0,8 rmin,
где rmin - минимальный радиус кривизны центрового профиля кулачка.
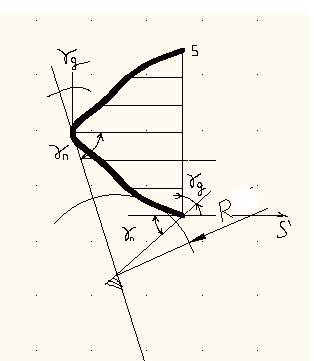
Для получения конструктивного (действительного) профиля кулачка строят эквидистантный профиль, отстоящий от центрового на величину радиуса ролика. Он получается как огибающая к дугам, проведенным из произвольных точек центрового профиля радиусом ролика. Если технология изготовления кулачка предусматривает использование дуг окружностей, то найденный действительный профиль следует заменить профилем, составленным из дуг окружностей. Дуги окружностей должны соответствовать полученному профилю в пределах требуемой точности построений. При такой замене следует помнить, что кулачок с профилем, составленным из дуг окружностей, всегда дает ступенчатый график ускорений, а график скорости всегда получается с изломом и только график перемещений может быть плавным. Это следует учитывать при выборе числа заменяющих дуг окружностей.