

Тормозные режимы сд. Механические характеристики сд в тормозных режимах.
В синхронных ЭП могут быть использованы все 3 известных электрических способа торможения:
- торможение противовключением
- рекуперативное
- динамическое
1. Торможение противовключением может быть реализовано так же как у АД при помощи изменения последовательности чередования фаз напряжения, подводимого к статору, но учитывая что синхронные двигатели используются в ЭП большой и сверхбольшой мощности этот способ торможения практически не применяется, так как приводит к перегреву двигателя и к преждевременному разрушению механизма область применения режима противовключения в СД ограничивается реверсом, при этом реверс реализуется, начиная с момента асинхронного запуска.
2. Рекуперативное торможение, в синхронном ЭП может быть реализован только в том случае, если к ротору приложить со стороны некого вспомогательного источника (активного) механической энергии дополнительный момент, направленный в сторону вращения. под действием этого момента скорость ротора станет больше синхронной скорости.
Изменяется
направление,
рабочая точка
перейдет
их 1-ого квадрата в 3-ий (на угловой
характеристике). Знак момента изменится
на
![]() и
по отношению к направлению угловой
скорости момент станет тормозным. Под
действием
и
по отношению к направлению угловой
скорости момент станет тормозным. Под
действием
![]() вновь
снизиться до
.
Очевидно, что для практической реализации
снижения угловой скорости меньше
.
Этот способ торможения неприменим.
вновь
снизиться до
.
Очевидно, что для практической реализации
снижения угловой скорости меньше
.
Этот способ торможения неприменим.
Учитывая сказанное, единственный способ торможения – динамическое торможение.
Рис.68
Рис.69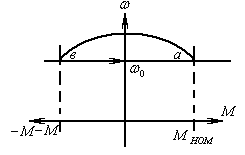

3. Динамическое торможение в сд реализуется так:
Статорная обмотка отключается от источника 3-х фазного переменного напряжения и замыкается на тормозное. ОВ ротора остаётся подключенной к источнику постоянного напряжения.
При этом взаимодействие статического магнитного поля с токами во вращающемся роторе создаёт в соответствии с правилом Ленца , момент направленный противоположно направлению вращающегося, т.е. тормозной. Механические характеристики аналогичны механическим характеристикам АД.
Интенсивность
торможения определяется величиной
![]() ,чем меньше
,чем меньше![]() тем
торможение интенсивнее.
тем
торможение интенсивнее.
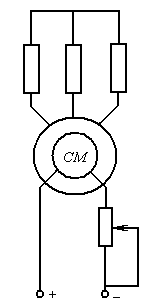

Рис.70 Рис.71
Синхронный эд, как объект управления. Динамические модели Синхронного эд и синхронный эп в переменных «входа-выхода»
Математическое описание Синхронной машины, необходимое для создания простой и удобной динамической модели должно включать в себя:
1. уравнение зависимости синхронного момента синхронной машины от нагрузки.
2. уравнение зависимости асинхронного момента синхронной машины от динамической жесткости.
3. математическая модель синхронного ЭП кроме перечисленных 2-х уравнений должна содержать также классическое уравнение движения ЭП:
![]() (73)
(73)
Момент созданный 3-х фазной обмоткой статора коммутации и ОВ.
Если иметь в виду
что область номинальных нагрузок
(моментов) соответствует
находящихся в пределе
![]() и
в этой области зависимости
и
в этой области зависимости
![]() носит
практически линейный характер, то:
носит
практически линейный характер, то:
![]() (74)
(74)
Известно , что может быть физически представлен в виде жесткости упругой электромагнитной связи, которая в этом случае будет аналогична жесткости упругой связи в механической модели ЭП (см. гл «Динамические модели 2-х массовой механической системы»). При этом растяжение упругой электромагнитной связи между осями в магнитном поле и ротора, равное углу будет зависеть от скорости, с которой вращается магнитное поле статора, и от скорости, с которой стремится вращаться ротор . Если при этих условиях продифференцировать уравнение (74), то получим:
![]() (75)
(75)
Кроме того, известно, что ротор синхронной машины снабжён дополнительной обмоткой типа «беличье колесо», которая обеспечивает дополнительную составляющую момента (асинхронную), которую можно представить как:
![]() (76)
(76)
где
-
динамическая жесткость
![]() (см.
«динамическая модель 2-х массовой
машины»)
Синхронный двигатель может быть
представлен в виде следующей структурной
схемы с учётом выбора переменных:
(см.
«динамическая модель 2-х массовой
машины»)
Синхронный двигатель может быть
представлен в виде следующей структурной
схемы с учётом выбора переменных:
![]()
![]()
![]() (77)
(77)
(78)
![]() (79)
(79)
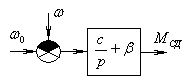
Рис. 72 - Структурная схема динамической модели синхронного электродвигателя
Динамическая модель синхронного электропривода кроме 2-ух уравнений (78-79) будет включать в себя уравнение (80):
(80)
![]() (81)
(81)
![]()
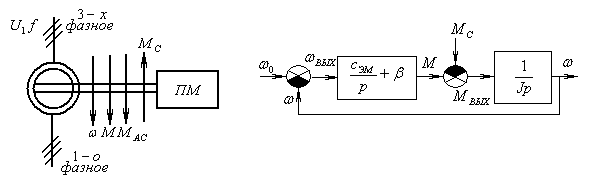
Рис.73 - Структурная схема динамической модели синхронного ЭП.