

§ 12. Линеаризация нелинейных функций и уравнений.
Линеаризация - приближённая замена нелинейной функции (уравнения) соответствующей линейной функцией (уравнением). Она производится в целях упрощения расчёта, но в ущерб точности.
Если исходное уравнение нелинейно, то из него необходимо выписать и линеаризовать все входящие в него нелинейные функции переменных (входных и выходных). Для линеаризации нелинейную функцию разлагают в степенной ряд Тейлора в окрестности расчётного статического режима и затем отбрасывают нелинейный остаток этого ряда в виду его малости.
Пусть имеется нелинейная функция F(x1). Разложение в степенной ряд Тейлора выглядит следующим образом:

F(x10)
- значение в установившемся режиме.
Первые два слагаемых образуют линейную
часть ряда, а все остальные - нелинейный
остаток (в общем случае он бесконечен).
Обозначим x1-x10=Δx1
- малое отклонение (приращение) x1.
Можно утверждать, что только при малости
отклонений нелинейный остаток может
быть отброшен, поскольку (Δx1)2,
(Δx1)3
- являются малыми величинами более
высокого порядка малости, чем
Δx1.
Это условие имеет под собой физическое
обоснование: при высоком качестве
регулирования величины отклоняются
мало от своих постоянных значений.
Второе условие линеаризации -
дифференцируемость функции в
рассматриваемой точке, т.е.
Линеаризованная функция равна линейной части ряда Тейлора:
 (1)
(1)
где индекс x1=x10 обычно заменяется нулем.
Отсюда можно найти линейное приращение нелинейной функции

Пример F(x)=ax2
Fл(x)=ax02+2ax0Δx - линеаризованная функция.
Если нелинейная функция задана графически, то ее линеаризация производится по методу касательной, при этом небольшой отрезок этой функции
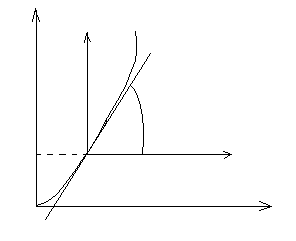

приближенно заменяется
соответствующим отрезком касательной,
угловой коэффициент которой находится
из графика по формуле:
![]()
где mF и mx – масштабы по осям.
Если нелинейная функция зависит от нескольких переменных, то ее линеаризуют аналогично:
![]()
![]()
Линеаризация дифференциального уравнения может быть сведена к следующим преобразованиям: в нелинейном уравнении все входящие в него функции (как линейные так и нелинейные) заменяются своими линейными приращениями, производные от переменных по времени заменяются соответствующими производными от их приращений в силу того, что
![]() ,
т.к. x0=const
,
т.к. x0=const
Приращение линейной функции получается при этом заменой переменной на ее приращение.
Пример:
![]()
Из уравнения статики a2y2=b0sin x найдем y0, зная x0. Затем получаем следующее линеаризованное уравнение для малых приращений:
![]()
Полученное таким образом линеаризованное уравнение приводится известным способом к стандартному виду, и по нему находятся передаточные функции для малых приращений.
§13. Cтруктурные схемы сар и их преобразования
Структурной называется схема, отражающая математическое преобразование сигналов. Она является по сути графической иллюстрацией к уравнениям системы.
Структурные схемы составляются для статических и динамических режимов и содержат следующие обозначения:
Звено обозначается прямоугольником, в котором записана математическая модель звена, например, в виде передаточной функции;
С


или
умматор: .Входные и выходные величины - в виде стрелок.
Узлы разветвлений - в виде точек.