

Утворення поверхонь.
Для утворення поверхні необхідно утворювати обидві відтворюючі лінії. Тому утворення поверхні характеризується поєднанням двох з чотирьох методів. У випадках, коли формоутворюючий рух бере участь в утворенні двох відтворюючих ліній (дублюється), загальне число формоутворюючих рухів (Ф) при утворенні поверхонь стає меншим на одиницю по відношенню до теоретично підрахованої суми. Наприклад, при круглому шліфуванні обидві відтворюючі лінії утворюються з використанням методу дотику (табл. 1). Твірна – за рахунок рухів Фv(О1), Фs1(О2), направляюча – за рахунок рухів Фv(О1), Фs2(П3). Формоутворюючий рух Фv(О1) дублюється. Ф дорівнює трьом, а саме: Фv(О1), Фs1(О2), Фs2(П3).
Порядок визначення комплексу небідних виконавчих рухів верстата.
Порядок визначення комплексу необхідних виконавчих рухів верстата подано в табличному вигляді (табл. 1) по графам:
Визначення відтворюючих ліній, що утворюють оброблювану поверхню (гр. 1).
Визначення схеми обробки (гр. 2).
Визначення методів формоутворення обох відтворюючих ліній та необхідної кількості формоутворюючих рухів (гр. 3, 4, 5).
Визначення необхідної кількості та складу інших виконавчих рухів (гр. 6).
Кінематична структура верстатів.
Кінематична група.
Кожен виконавчий рух у верстатах здійснюється кінематичною групою (КГ). В склад КГ входять: джерело руху, виконавчий орган (органи), кінематичні зв’язки та органи настройки, які забезпечують необхідні параметри руху.
Кожна КГ включає в себе два якісно різних види кінематичного зв’язку – внутрішній та зовнішній.
Внутрішній кінематичний зв’язок (ВКЗ) – сукупність кінематичних ланок та їх з’єднань, які забезпечують якісну характеристику руху, тобто його траєкторію. В простих КГ ВКЗ здійснюється з’єднанням двох ланок виконавчої групи, які дотикаються, однією з них є сам виконавчий орган. Так в КГ яка реалізує рух Фv(О), ВКЗ забезпечується зв’язком між виконавчим органом (шпинделем) і підшипниками, на яких він змонтований (табл. 2).
В складних КГ ВКЗ реалізується у вигляді кінематичного ланцюга, який поєднує рухомі виконавчі органи групи і забезпечує чітку функціональну узгодженість їх переміщень та швидкостей (табл. 2). Кількість ВКЗ у групі менша на одиницю від кількості простих рухів, з яких складається складний рух. Наприклад, при застосуванні черв’ячних фрез з прямими стружковими канавками необхідно забезпечити складний формоутворюючий рух Фv(О1П2П3), в склад якого входять три простих рухи О1, П2 і П3 КГ, яка реалізує цей формоутворюючий рух, має два ВКЗ, а саме: О1П2 – ланцюг затилування, який забезпечує узгодження обертання заготовки (О1) з радіальною подачею інструмента (П2); О1П3 – гвинторізний ланцюг, який забезпечує узгодження обертання заготовки (О1) з поздовжньою подачею інструмента (П3).
Т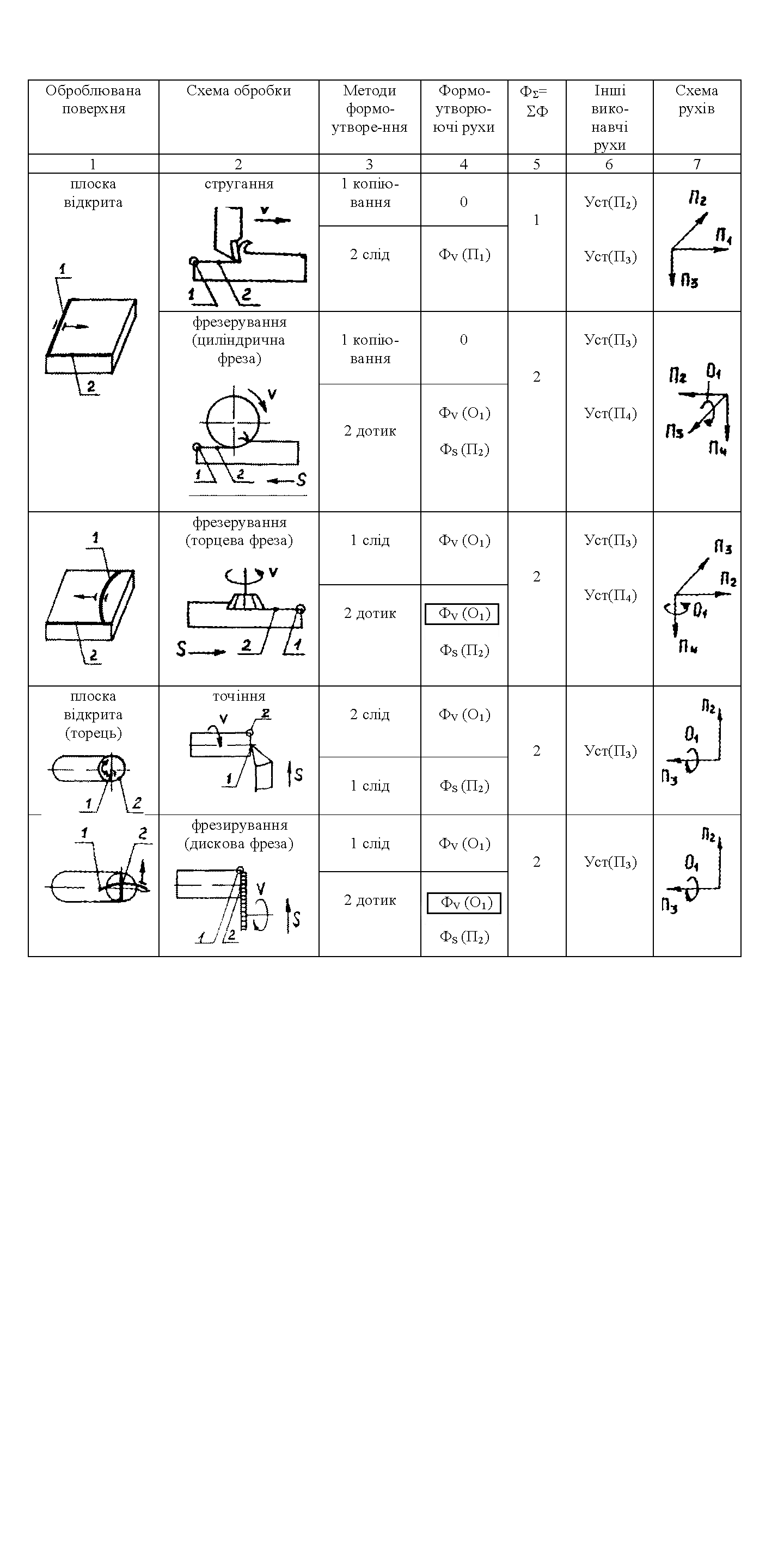 аблиця
1. – Порядок визначення комплексу
нео6хідних виконавчих pyxiв верстата
аблиця
1. – Порядок визначення комплексу
нео6хідних виконавчих pyxiв верстата
Т аблиця
1 (продовження)
аблиця
1 (продовження)
Т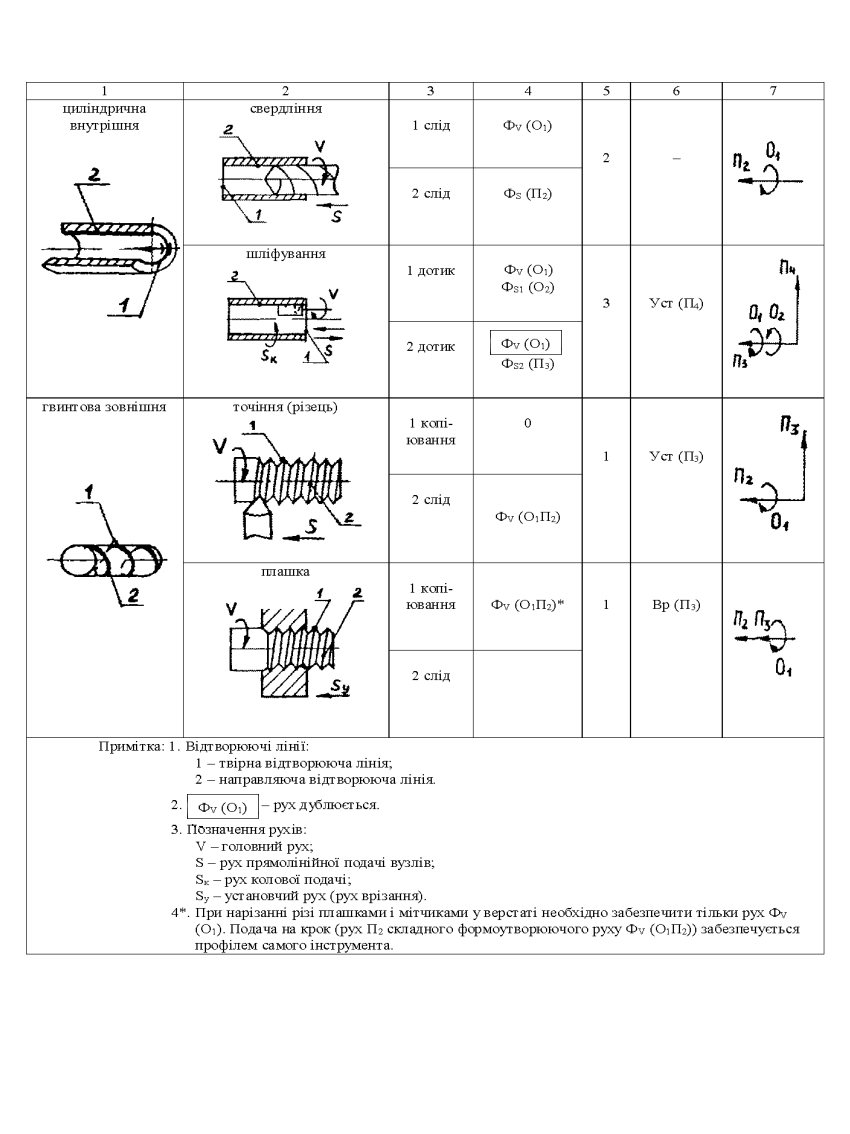 аблиця
1 (продовження)
аблиця
1 (продовження)
Зовнішній кінематичний зв’язок (ЗКЗ) – сукупність кінематичних ланок та їх з’єднань, які забезпечують кількісну характеристику руху, тобто його швидкість, напрям, шлях та вихідну точку. ЗКЗ призначений для передачі енергії від джерела руху у ВКЗ групи і реалізується у вигляді кінематичного ланцюга між джерелом руху і однією з ланок ВКЗ групи.
Для складання структурних схем кінематичних груп верстата використовуються умовні позначення елементів, що наведені в таблиці 2.
Органи настройки на вихідну точку і лях у більшості випадків і структурних схемах не позначається, так як регулювання цих параметрів, як правило, здійснюється вручну.
Органи настройки, які регулюють кількісні характеристики руху, завжди розміщуються в ЗКЗ групи.
Органи настройки, які регулюють якісну характеристику рух, тобто його траєкторія, розміщуються тільки у ВКЗ групи. В простих КГ орган настройки на траєкторію відсутній. В складних КГ органів настройки на траєкторію може бути декілька, але не менше від загальної кількості ВКЗ у групі. Наприклад, при нарізані різі різцем небідно забезпечити один складний формоутворюючий рух Фv(О1П2) (табл. 1). КГ, яка реалізує цей рух, має один ВКЗ, а саме О1П2, тобто гвинторізний ланцюг, який забезпечує узгодження обертання заготовки (О1) з поздовжньою подачею інструмента (П2). Таким чином КГ як мінімум повинна мати один орган настройки на траєкторію на забезпечення кроку гвинтової лінії. Якщо на верстаті нарізається як метрична, так і модульна різі, то КГ повинна мати додатковий орган настройки на траєкторію, який забезпечує кратність кроку цілому числу (для метричної різі) або числу (для модульної різі).