

9. Теоретические основы осрв
Для дальнейшего рассмотрения характеристик ОСРВ необходимо их более строгое теоретическое описание. Большинство систем реального времени по своей сути параллельны, т.е. их взаимодействие с внешними событиями требуют одновременной обработки нескольких задач.
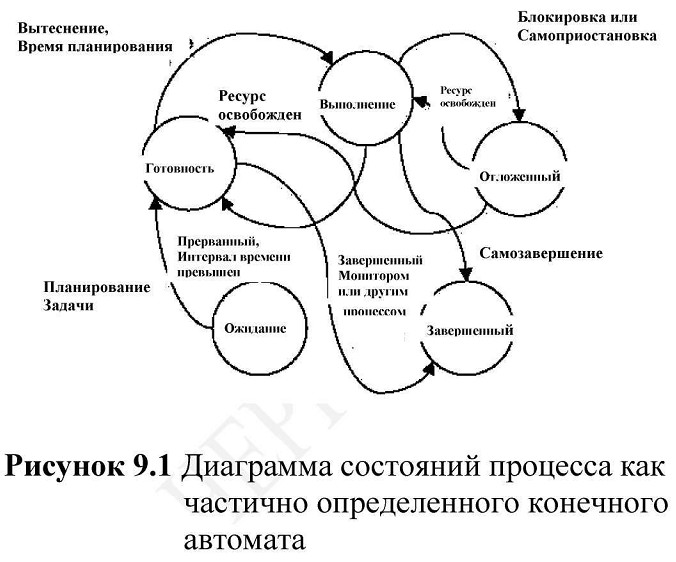
Процесс (то же что и задача) является как активным объектом системы, так и основной вычислительной единицей, обрабатываемой планировщиком. При выполнении процесса он постоянно изменяет свое состояние, но в любой момент времени может находится лишь в одном из состояний:
- Неактивный (ожидание). Задача создана и инициализирована, однако не готова для выполнения. Т.е. в этом состоянии процесс не имеет права на выполнение.
- Готовность. Процессы в этом состоянии разблокированы и имеют право на выполнение, но не выполняются. Процесс переходит в состояние готовности, если он выполнялся и его время выполнения закончилось, или если он был вытеснен. Если процесс был отложен или заблокирован, он перейдет в состояние готовности, если произойдет инициирующее его событие.
- Выполнение. В этом состоянии выполняются команды процесса.
- Отложенный (заблокированный). Состояние в котором процессы ждут конкретного ресурса и не готовы к выполнению.
- Завершенный. Процесс завершил выполнение, либо прервал себя сам, либо в нем нет больше необходимости.
Аналогичные процессам потоки в любой момент времени могут быть только в одном их приведенных выше состояний.
Следует отметить что различные ОС имеют разные соглашения о наименованиях состояний, но состояния, рассмотренные выше в той или иной форме представлены во всех ОСРВ.
Многие современные ОС позволяют процессам, созданным в рамках одной и той же программы иметь неограниченный доступ к совместно используемой памяти посредством возможностей потока.
10. Процесс планирования
Планирование является одной из основных функций ОС. В целях обеспечения требований функционирования программ в системах РВ необходимы: стратегия для упорядочивания использования системных ресурсов и механизм для прогнозирования наихудшей производительности (времени отклика) при применении конкретной политики планирования.
Есть 2 основных класса политики планирования: предварительное планирование, планирование во время выполнения. Целью обоих типов планирования является учет временных ограничений.
При предварительном планировании цель заключается в создании допустимого расписания в автономном режиме, что гарантирует порядок выполнения процессов и предотвращает одновременный доступ к общим ресурсам. При предварительном планировании также учитываются и снижаются затраты на переключение контекста.
При планировании во время выполнения назначаются статические приоритеты, и на приоритетной основе выделяются ресурсы. Планирование во время выполнения опирается на сложный механизм времени выполнения задач для их синхронизации и коммуникации. Такой подход позволяет событиям прерывать процессы и запрашивать ресурсы в случайном порядке.
С точки зрения анализа производительности инженеры программисты должны опираться на стохастическую имитацию (имитационное моделирование) при проектировании и проверке систем таких типов.